粗糙时空棱柱上的可达性分析
2018-08-20 09:58赵兹
山东工业技术 2018年14期
赵兹
摘 要:时间地理学中的时空棱柱(简记STP)模型从本质上反映移动对象运动轨迹的不确定性信息。而已有的粗糙时空棱柱(简记RSTP)模型利用粗糙集理论研究时间地理学中的不确定信息,本文试图研究覆盖近似空间下RSTP模型的可达性。
关键词:RSTP模型;覆盖近似空间;可达性
DOI:10.16640/j.cnki.37-1222/t.2018.14.207
1 引言
H?gerstrand提出的时间地理学理论中的STP模型是建立在三种严格的约束条件之上的,用来刻画人类活动的潜在空间。2007年美国学者Tijs Neutens首次将粗糙集理论应用于移动对象时空模型中,提出了RSTP的概念,用来研究构成STP模型的现实观测值在空间和时间上的不确定性传播问题。目前,可达性的评价模型很多,均从不同角度对可达性进行了分析,但是很少考虑到RSTP模型下的可达性。本文试图将可达性的计算引入到RSTP模型中。
2 RSTP模型的可达性分析
2.1 RSTP模型的基本理论
定义2.1设是一个非空论域;是的非空子集构成的集合,即,,且表示一个经典的STP模型;若F构成了的一个覆盖,则称有序对为基于STP的覆盖近似空间,并且该近似空间上的广义覆盖上、下近似算子分别记为[6][7]:。
定义2.2设为一个覆盖近似空间,RP表示一个移动对象在给定的时间段内所有可能到达的位置在时空维度上的坐标构成的集合,且.若,则称RP是一个经典的STP模型;否则称RP为RSTP模型。
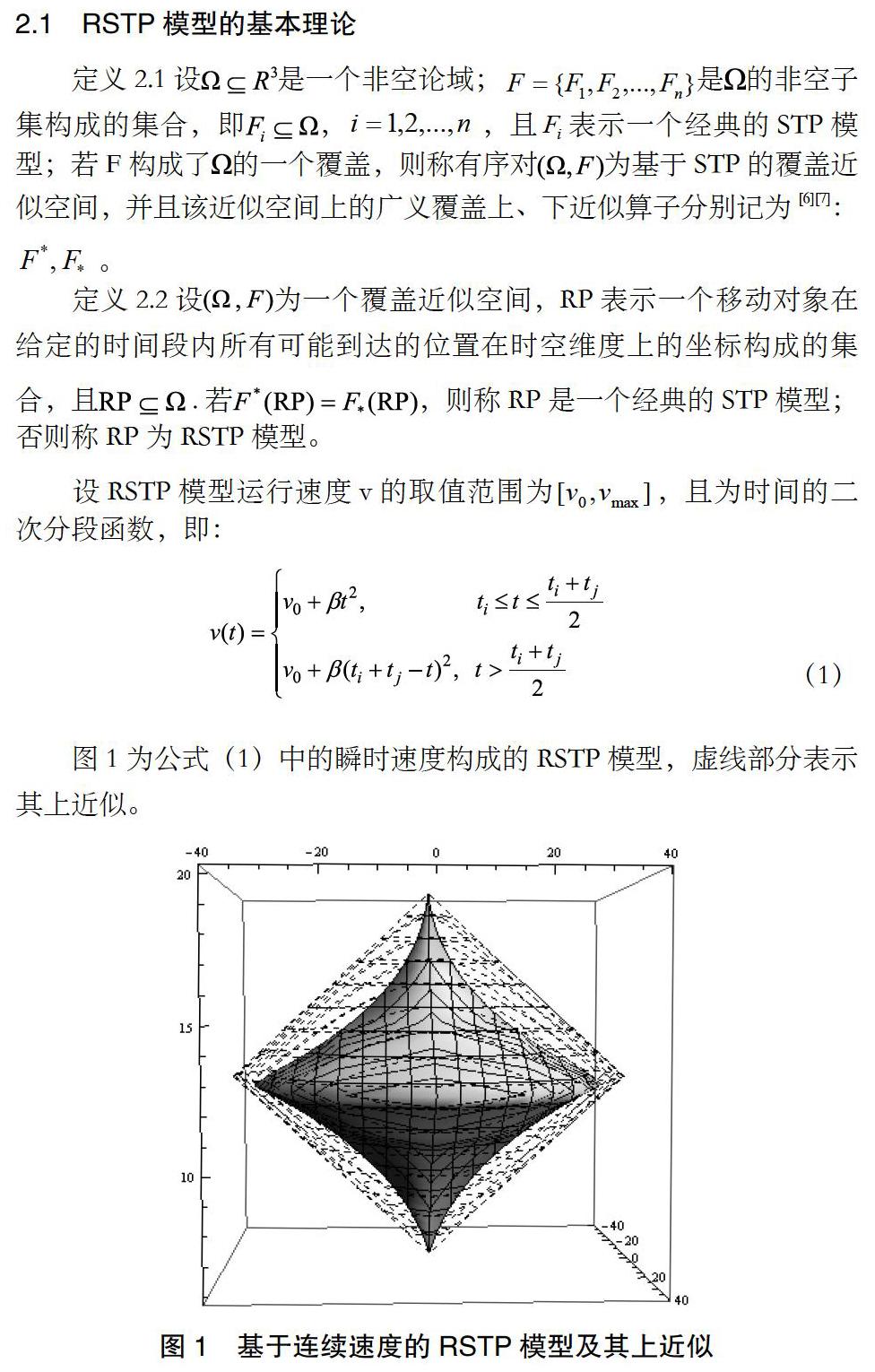
设RSTP模型运行速度v的取值范围为,且为时间的二次分段函数,即:
图1为公式(1)中的瞬时速度构成的RSTP模型,虚线部分表示其上近似。
2.2 可达性分析
时空可达性是指人们对于某个公共设施获得的难易程度,也可以用来表示人在给定的时间范围内可以获得的活动空间的大小,因而可以利用RSTP模型的体积刻画某件事物的可达性。
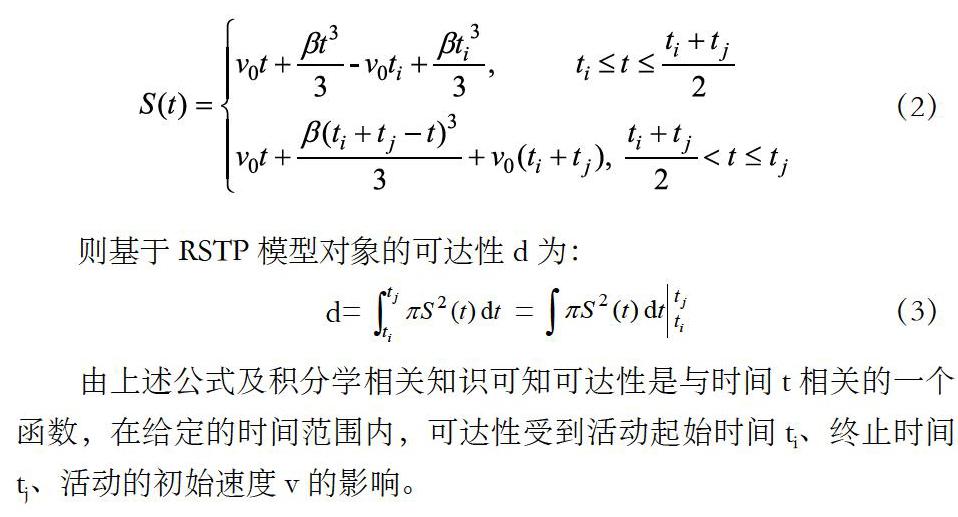
RSTP模型在本质上是一个旋转体,根据公式(1)可知图1中的模型可以看成是路程函数曲线S(t)绕时间轴t旋转而成的,其中:
由上述公式及积分学相关知识可知可达性是与时间t相关的一个函数,在给定的时间范围内,可达性受到活動起始时间ti、终止时间tj、活动的初始速度v的影响。
3 小结
分析现有RSTP模型,将覆盖近似空间理论引入到了时间地理学模型的研究中,给出了该模型下可达性的一种计算方法,而针对可达性的不确定性分析的研究是今后的主要方向。
参考文献:
[1]王国胤,Yiyu Yao,于洪.粗糙集理论与应用研究综述[J].计算机学报,2009,32(07):1229-1246.
[2]胡军,张闽.覆盖近似空间的约简理论[J].计算机工程与应用,2007,43(28):86-87.
[3]梁吉业,李德玉.信息系统中的不确定性与知识获取 [M].北京: 科学出版社,2004:3-39.
[4]刘保相.粗糙集对分析理论与决策模型[M].北京: 科学出版社,2010:1-8.
[5]张平,黄德才.基于联系度的Rough集[J].杭州电子工业学院学报,2001,21(01):50-54.
[6]邓羽,蔡建明,杨振山等.北京城区交通时间可达性测度及其空间特征分析[J].地理学报,2012,67(02):169-178.
[7]方志祥,李清泉,萧世伦.利用时间地理进行位置相关的时空可达性表达[J].武汉大学学报,2010,35(09):1091-1094.
[8]李亚婷,秦耀辰,潘少奇.基于GIS的交通网络可达性评价方法研究[J].云南地理环境研究,2007,19(06):99-103.