基于无人机的外脚手架安全性自动检查系统设计与实现
2018-08-22 01:30马国鑫孙佳宁顾月琴尤少迪
土木工程与管理学报 2018年4期
马国鑫, 韩 豫, 孙佳宁, 顾月琴, 孙 昊, 尤少迪
(1. 江苏大学 土木工程与力学学院, 江苏 镇江 212013; 2. 澳洲国立大学 国家信息通信技术中心, 堪培拉 2600)
外脚手架是重要的施工辅助装置。随着高层、超高层建筑的增多,外脚手架安全日益重要[1]。长期以来,外脚手架安全性检查主要由人工完成,但随着搭设高度增加,仅依靠人工已无法确定其安全状态。因此,克服高度限制、提高外脚手架安全性检查的效率、降低事故发生率意义重大。
目前,外脚手架安全管理主要关注事故原因及预防方法,并由受力计算向信息化管理发展。事故原因方面,主要由设计缺陷、整体稳定性差、关键杆件缺失、现场控制缺乏等引起[2~5]。预防方法方面,主要使用ANSYS、层次分析法等分析影响因素,构建安全管理模型[6,7]。同时,基于BIM的脚手架安全识别系统已建立[8],移动IT、RFID等被用于脚手架的实时监测[9,10]。但上述技术和方法集中于使用传感器获取状态信息,无法非接触地确定外脚手架的安全性。无人机航空摄影具有高效、便捷、低成本等优势。近年来,被用于大厦变形监测、桥梁裂缝检测、结构健康监测等[11~13],基于颜色、形状等的特征提取算法已用于农作物监测、种类识别等[14]。上述算法能够满足特征提取的基本需求,但对多特征并存的土木工程适用性不高,亟需针对性地研究与开发。
为此,本研究以图像识别为核心支撑,以外脚手架杆件线性特征为突破口,设计并测试了外脚手架安全性自动检查系统。以期改善外脚手架安全检查方式,实现非接触、自动化的外脚手架安全性检查。
1 外脚手架安全性自动检查系统架构
本系统主要由图像采集装置、图像处理及分析系统、标志板、垂直度标杆及用户端构成。其中,图像处理及分析系统为本系统的核心。
1.1 系统构成
本系统构成及其功能见表1。

表1 系统构成及功能
其中,图像采集装置由无人机和移动操控设备构成,具体见图1。
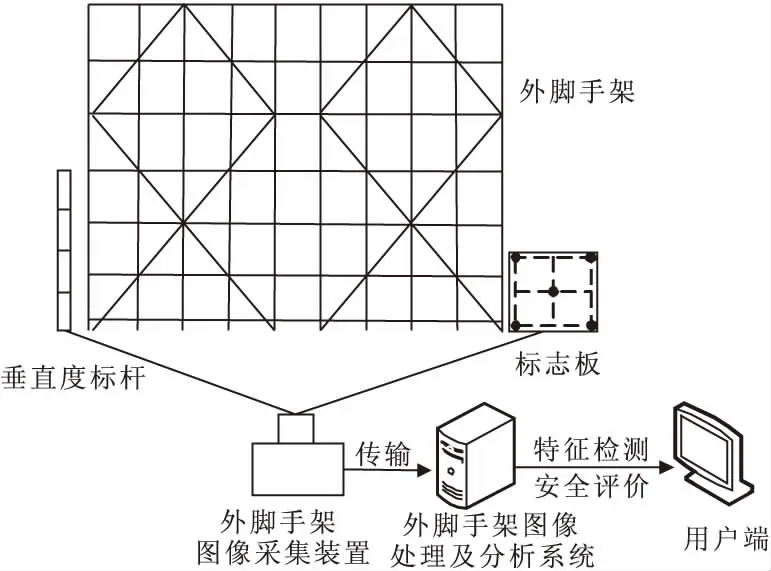
图1 系统构成
1.2 系统运行流程
本系统运行流程包括图像采集、图像特征分析和结果输出(图1)。
1.2.1图像采集
根据建筑外立面特点和限制条件,将外脚手架立面划分为若干矩形区域,并在矩形中心及角点设置图像采集点。采集前,依据标志板成像调整无人机角度,使其与作业平面垂直。采集时,无人机与脚手架立面呈90°,于各点采集4张图像。然后,保持角度不变,控制无人机飞离脚手架并拍摄3张整体图像,用于人工复核。对于采集的图像,需保证图像清晰,减少阴影等干扰。
1.2.2图像特征分析
(1)图像预处理:先畸变校正合格图像,再使用Gauss滤波器平滑图像,并进行外脚手架和垂直度标杆图像的边缘检测和形态学变换。
(2)目标提取及识别:使用Hough变换提取图像中的直线并识别直线种类。
(3)安全性评价:1)根据垂直度标杆的提取结果计算坐标修正值和尺寸换算系数;2)在脚手架各面同一水平高度的部分立杆上设置沉降标志,用于立杆沉降检查;3)计算项目所需特征值,判断是否符合规范。
(4)人工复核:检查人员参照整体图,校验不符合规范的图片,完善检查报告。
(5)报告生成:根据分析结果和人工复核情况生成安全检查项目的检查报告。
(6)图像拼接:使用基于尺度不变特征转换 (Scale Invariant Feature Transform,SIFT)的图像拼接方法,生成杆件提取效果的完整图像。
1.2.3结果输出
根据分析结果,输出外脚手架安全性检查报告及杆件提取效果的完整图像,具体流程见图2。

图2 系统运行流程
2 核心算法
本系统的核心算法包含外脚手架杆件特征提取方法和安全性分析方法。其中,核心问题是提取杆件线性特征及相关参数,并计算安全检查项目所需特征值。
2.1 外脚手架杆件特征提取方法
2.1.1外脚手架图像边缘特征提取方法
(1)外脚手架图像去噪
外脚手架图像的质量是杆件特征提取的基础。然而,外脚手架图像采集、传输中会存在较多噪声,使特征退化,影响提取的准确性。为保证获得准确的外脚手架图像,可采用滤波方法。
由于大多数噪声近似服从正态分布,高斯滤波具有较好的平滑效果和灵活的滤波调节尺度,因此,本文选用高斯滤波。首先,选择3×3模板,以卷积的方法将各像素乘权重并计算加权平均值,代替当前像素值。高斯滤波结果由式(1)可得:
(1)
式中:σ为标准差;x为像素值。
(2)外脚手架图像边缘检测及形态学变换
外脚手架图像的边缘特征提取是杆件线性特征检测的前提。常用的边缘检测算子有Sobel算子、Canny算子等,使用以上两种算子提取脚手架图像边缘,效果如图3。
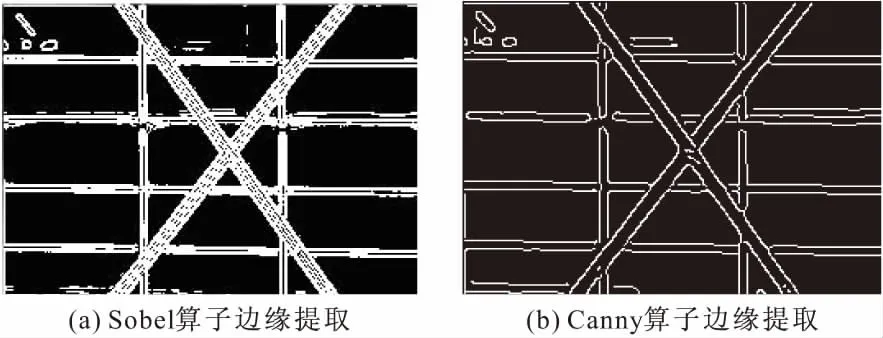
图3 外脚手架边缘特征提取
可见,Canny算子边缘提取效果较好,但存在极少边缘断裂和细微空洞。因此,本文选用形态学方法对边缘图像进行闭运算,并使用面积滤波,依据连通区域内像素数目分离杆件和噪声。
2.1.2外脚手架图像杆件线性特征提取方法
外脚手架杆件线性特征的提取是安全性分析的关键。外脚手架杆件为直的钢管,线性特征突出。大量的密目网、节点扣件是特征提取的重难点。Hough变换在检验已知形状目标方面具有受曲线间断影响小和不受图形旋转影响的优点。因此,本文选用Hough变换提取杆件线性特征。
Hough变换利用图像和参数空间点线的对偶性,通过参数空间的累加统计,寻找累加峰值,基本原理为:对像素点逐一做点线变换,当所得值落在某个(k,b)小格区间内,小格的累加器加1。全部像素点变换完毕后,此时累加器的峰值对应的(k,b)即为图像中直线的斜率和截距。
2.2 外脚手架安全性分析方法
本文以扣件式脚手架为例,介绍外脚手架安全性分析方法。
首先,将检测出的所有直线按照校正后的角度分为0°±10°,90°±10°及其他三类,并拟合直线方程。然后,结合外脚手架搭设规范,分析外脚手架安全性,具体如下。
(1)纵向水平杆检查
1)计算每条直线两端点纵坐标差值并换算,判断纵向水平杆水平度偏差是否符合规范;
2)计算相邻两条直线上对应横坐标相同的像素点纵坐标差值的最大值,换算后与设计值作差,判断纵向水平杆间距偏差是否符合规范。
(2)架体立杆检查
1)计算每条直线两端点纵坐标的差值,并将最大差值换算后作为架体高度。人工测量并输入相关参数确定允许搭设高度,判断搭设高度是否符合规范;
2)计算每条直线上沉降标志中心至直线底部的纵坐标差值,判断沉降值是否符合规范;
3)计算相邻两根直线上对应纵坐标相同的点的横坐标差值的最大值,换算后与设计值作差,判断立杆纵距偏差是否符合规范;
4)计算直线两端点横坐标差值并换算,判断立杆垂直度偏差是否符合规范。
(3)剪刀撑斜杆检查
1)根据校正后的直线角度判断剪刀撑斜杆与地面倾角是否符合规范;
2)计算两条相交直线上纵坐标相同时对应点横坐标差值的最大值并换算为实际宽度;计算相邻斜杆纵坐标相同时对应所有横坐标差值的最小值并换算为实际间距,判断宽度和间距是否符合规范。
(4)杆件缺失检查
根据拟合的直线方程,若存在2条及以上相同的直线方程,则存在缺失情况,判断缺失种类。
3 系统实现与测试
3.1 系统实现
系统实现的重难点是在MATLAB平台编译并实现外脚手架图像处理及分析的程序和功能。
(1)硬件实现
本系统使用四轴旋翼无人机作为图像采集工具。其他还包括计算机、垂直度标杆和标志板。
(2)软件实现
本系统基于MATLAB R2015b平台,并安装图像处理工具箱。MATLAB图像处理工具箱内置了大量数字图像处理的基本函数和通用算法,也提供了可用于二次开发的程序编译平台。
(3)测试环境
测试所使用的计算机环境为:Intel(R) Xeon(R) E5-1241 3.50 GHz处理器,32 GB RAM,Windows 8 64 bit,NVIDIA Quadro K1200图形显卡,安装MATLAB 2015b软件。
3.2 系统测试
为验证外脚手架图像采集和安全性分析的可操作性,进一步提升其准确性,需对系统进行测试。本次测试采集了5个高层项目外脚手架图像共100张,筛选后剩余80张符合质量要求的图像。
(1)外脚手架及垂直度标杆特征提取
1)垂直度标杆特征提取
垂直度标杆竖直放置,使用无人机采集垂直度标杆图像,提取垂直度标杆线性特征,计算坐标修正值和尺寸换算系数,如图4所示 。其中,图4b中绿色直线为杆件线性特征提取结果,由MATLAB软件根据编译的算法对图像运算后生成。

图4 垂直度标杆杆件提取
提取结果表明垂直度标杆与地面夹角为90°,因此坐标修正值为(0,0);垂直度标杆实际长度为2 m,骨骼化后直线像素点数目为121,即尺寸换算系数为16.53 mm/像素。
2)外脚手架杆件特征提取
使用本文杆件特征提取方法提取500×400和1000×800图像中杆件特征并人工复核,见图5。
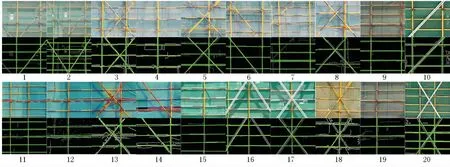
图5 外脚手架特征提取效果
测试和分析发现,外脚手架杆件特征提取效果较好,平均正确率可达88.94%,相同像素点数目的图像处理时间相差不大,处理时间与杆件根数、像素点数目有正相关趋势,见表2和图6。

表2 外脚手架特征提取效率统计
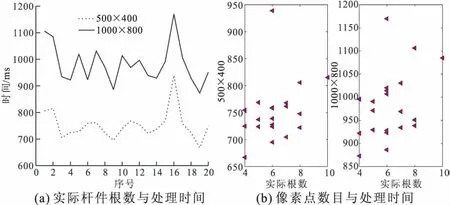
图6 系统处理时间关系
(2)外脚手架安全性分析
在本次测试中,选用图5中的第20幅图作为外脚手架安全性分析的测试示例,并人工测量立杆、纵向水平杆及剪刀撑斜杆的实际间距。根据外脚手架杆件特征的提取结果,该图像中的相关特征参数见表3。
提取结果表明垂直度标杆夹角为90°,可知角度修正值为0°,分别拟合直线方程,见表4。
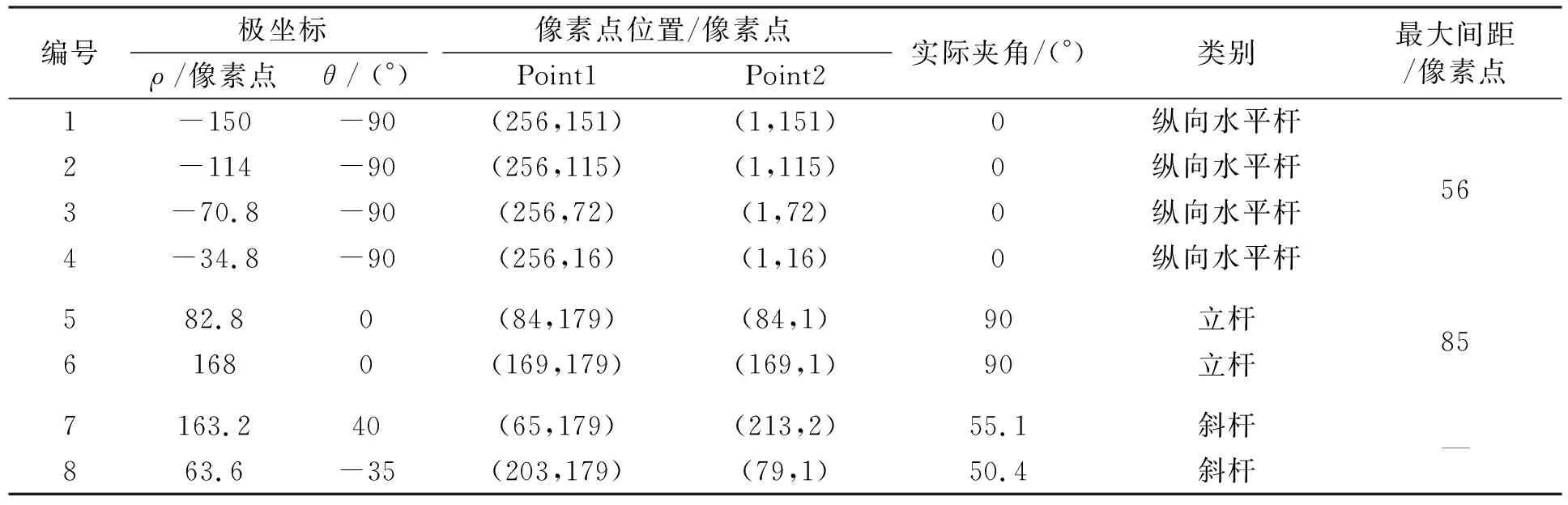
表3 外脚手架图像相关参数

表4 直线方程拟合
根据表3,4进行以下安全性检查:
1)纵向水平杆检查
由表3,4可知,纵向水平杆的4条直线的夹角为0°,直线的水平度偏差为0,符合规范。纵向水平杆间距计算见表5,间距偏差符合规范。
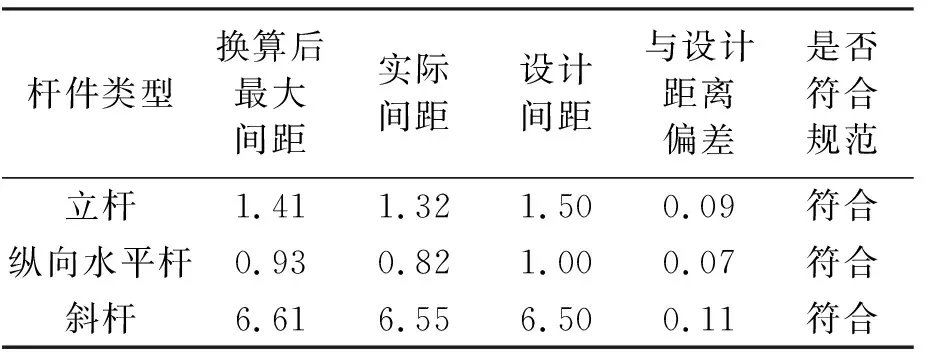
表5 杆件距离计算 m
2)架体立杆检查
由表3,4可知,立杆直线角度为90°,垂直度偏差为0,符合规范。立杆间距计算见表5,间距偏差符合规范。同时,直线5,6端点像素纵坐标差值杆件高度相等。由于示例图像为局部图像,杆件高度计算可行性已经验证,架体高度和沉降需在整体图像中进行,故不另赘述。
(3)剪刀撑斜杆检查
由表3,4可知,斜杆直线夹角符合规范允许的45~60°。结合局部图像可知,图像中两条直线相交,直线上对应纵坐标相同的点横坐标的最大差值为138,搜索下部图像并计算后得到底部两直线横坐标差值为340,换算后符合规范。由于该脚手架高于24 m,不考虑斜杆间距。
(4)杆件缺失情况检查
根据拟合的杆件直线可知,三类杆件中直线方程互异,因此,均不存在杆件缺失情况。
4 结果分析
根据系统测试结果,分析系统主要流程和方法,找出系统优势及不足,进一步完善系统。
(1)外脚手架特征提取准确性及影响因素
本次测试中,脚手架图像特征提取平均正确率达88.94%,平均误检率为2.8%,平均漏检率为8.27%。边缘提取时,密目网破洞、杆件颜色相似程度影响边缘检测效果。线性特征提取时,直线检测依赖峰值设置准确性。同时,闭运算连接了边缘,过小的杆件间距导致漏检和交点错位。
对此,在图像采集时,应充分考虑光照,在边缘提取前加强图像去噪。另外,优化直线检测中峰值的选择,控制识别距离和精度,避免漏检。
(2)外脚手架安全性分析准确性及影响因素
测试发现,间距计算受直线提取效果影响,有一定波动性。由于杆件自身存在宽度,提取时将杆件简化为宽度一致的直线,影响间距计算的准确性。同时,杆件受力后的挠度会造成杆件间距和缺失判断失误。由于无人机只采集脚手架的表面特征,扫地杆、变形等特征未考虑,也是本系统需要完善之处。
对此,应提高直线检测精度,避免错位导致的距离误差。赋予替代直线一定宽度,增强真实性。另外,辅以人工测量,提高安全分析准确性。
(3)系统操作体验
本系统图像采集装置采用四轴旋翼无人机,操作便捷。但需适合的起降场地及足够的空域范围,且无法在雨、雪等天气工作。同时,无人机续航时间约为20~25 min。在实际操作中,若采集点较多,更换电池后需重新校正无人机角度和距离。无人机的高空管制问题致使该系统应用于超高层建筑时需考虑无人机重量及飞行高度。
对此,应考虑选择适合起降场地,同时,避免在极端天气环境下执行作业。另外,优化采集路线,提高采集效率,避免更换电池等问题。
5 结 语
笔者基于无人机和图像识别技术,设计并测试了外脚手架安全性自动检查系统。该系统可用于外脚手架搭设高度、沉降、杆件间距、立杆垂直度偏差、纵向水平杆水平度偏差、斜杆宽度和间距、倾角以及杆件缺失的检查,弥补了低成本、非接触式的外脚手架安全性检查技术的空白。
经测试,杆件特征提取平均正确率达88.94%,平均误检率为2.8%,平均漏检率为8.27%,可满足实际需求。本系统具有成本低、自动化、效率高等优势。同时,对于大厦、桥梁等的变形监测也有一定借鉴意义。
未来,将通过优化杆件特征提取算法、辅以人工测量来提高外脚手架杆件提取和安全性分析的准确性。在后续的研究中,需增加安全性分析的依赖特征,进行多因素分析,完善本系统。
猜你喜欢
上海建材(2022年3期)2022-11-04
建材发展导向(2022年10期)2022-07-28
气象水文海洋仪器(2021年4期)2021-12-11
建材发展导向(2021年20期)2021-11-20
昆明医科大学学报(2021年5期)2021-07-22
建材发展导向(2021年6期)2021-06-09
小学生学习指导(当代教科研)(2021年6期)2021-05-23
四川建筑(2021年1期)2021-03-31
煤(2019年12期)2019-12-12
高中时代(2017年7期)2018-02-24