无人机多余度航空电子系统设计与应用
2018-08-25 08:14杨璐
电子设计工程 2018年16期
杨璐
(西安航空职业技术学院陕西西安710089)
近年来,我国航空电子技术得到了空前的发展,其系统可靠性与安全性与无人机系统息息相关,一方面影响着无人机系统生存能力,另一方面也关系着其任务执行效率[1]。单纯依赖某个元件质量及装配工艺提升,很难满足无人机系统要求[2]。近年来,余度技术在无人机系统设计中得以应用,其能够促进飞控计算机可靠性能力的提升,及时处理故障部件,具有较高的安全性[3],因此,对无人机多余度航空电子系统设计与应用的研究有着重要的实践意义与应用价值。
1 构型方案设计
1.1 余度数目及系统可靠性的选择
余度设计对于航空电子系统相关设备运行可靠性、安全性有着极为重要的作用。所谓余度设计主要指的是当发生两个及两个以上独立故障所造成的产品失效设计方法[4],简单来讲,就是将多个低可靠性分系统、设备等进行组合使其形成一个具有较高安全性、可靠性的系统[5]。无人机机载航空电子系统中的每个单元均遵循指数分布的原则。与单独单元可靠度相比,串联系统可靠度相对较低。且当串联系统单元数增多时,并联系统可靠度也会随之增加。假设采用Ri(t)表示单独通道可靠度,那么其不可靠度则为1-Ri(t)[6],一般情况下,n个环节组成的航空电子系统至少包含了r个正常工作环节,才能确保系统顺利工作,其被称作是r/n系统,若各个环节可靠度均为R(t),那么可以采用数学模型对其系统可靠度进行表示:
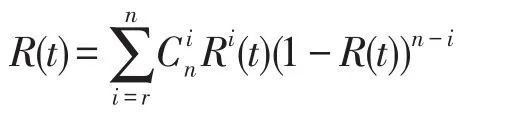
通常,元件及各个环节可靠度均呈现出指数分布特点,R(t)=e-λt,假设r为 2,那么可以将其系统可靠度表示为:
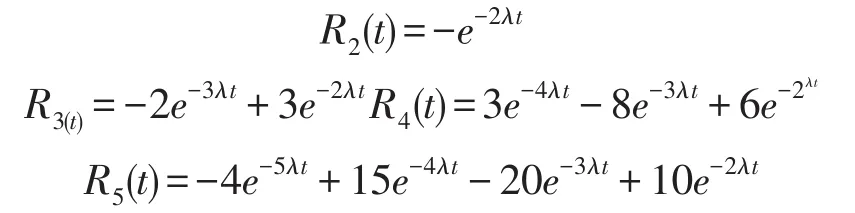
上述公式可以通过曲线的方式绘制在同一图形中,随着时间的变化,其可靠度也会发生相应的变化,假设λ取值相同,具体见图1。可以发现,余度数目事实上并不与任务可靠性、安全性表现为正相关关系。通常,简单的并联余度系统当期余度数目增加时,任务安全性增加将会逐渐缓慢,必须对其各项任务可靠性权衡之后才能够确定[6]。从当前飞行棋内部分系统实际情况看,常见的有二余度、三余度、四余度,部分国外飞机还采用了五余度。需要注意的是,余度数目的增加会在一定程度上增加检测、隔离及转换装置判断等,降低系统可靠性。基于上述问题,在设计中必须确保系统余度安全性及可靠性,避免余度布局引起的质量、体积及故障率等影响到系统运行。综合以上分析,该研究选择的是三余度飞控计算机及飞行参数传感器对余度航空电子系统模式进行构建。
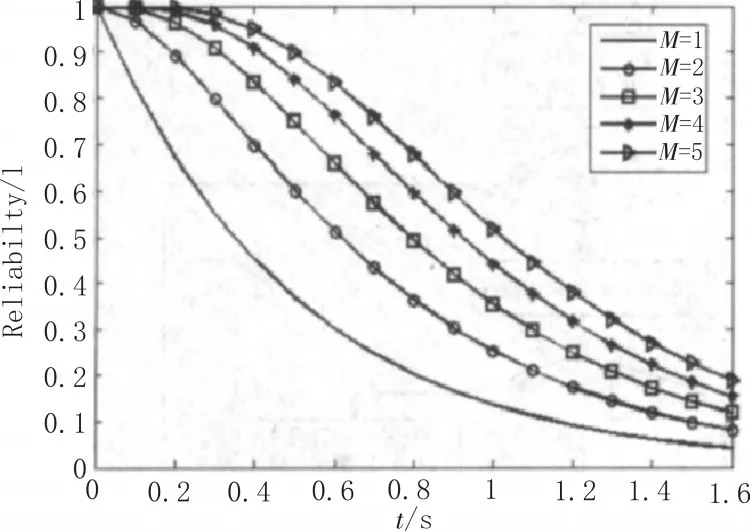
图1 不同余度数目的系统可靠度分析
1.2 三余度航空电子系统架构
主控板与两个接口板共同构成了飞控计算机3个通道,温度及压力传感器等均需挂于离散/模拟板下。GPS、无线电高度计等数字量传感器需挂于数字量接口板下,接口板能够实现对数据的有效采集,并对其进行相应的处理,转化成为数字量,进而传输到主控板,通过软件表决对控制率输入数据进行计算,然后再按照其类型依次输出。一般情况下,无人机都由多个机载飞行参数传感器组成,常见的有发动机参数传感器、飞行姿态传感器等,根据其数据类型可以划分为离散量传感器、模拟量传感器以及数字量传感器3种类型,每个传感器均挂于其所对应的接口板,无人机三余度航空电子系统构架图如图2所示。
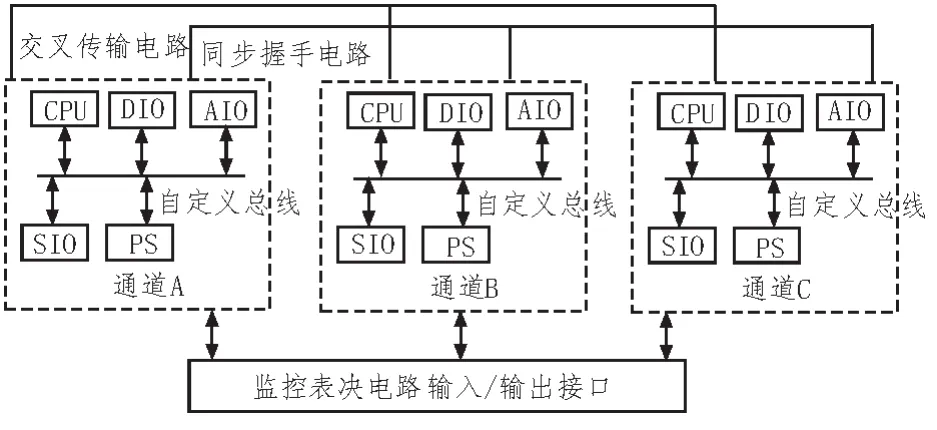
图2 无人机三余度航空电子系统架构图
2 余度管理技术
作为余度设计的核心部分,余度管理方式的好坏直接关系着该系统的体积、重量以及运行可靠程度,与此同时对费用也起着决定性作用[7]。通常采用不同余度管理方式对余度数相同系统进行管理能够获得较好的可靠度。余度设计最终使为了确保各项任务的高效实现,保障飞行安全。然而当发生故障后,将会大大降低系统性能,该系统能够为故障瞬态起到一定的保护作用。余度管理设计主要涉及到以下几方面内容:
2.1 数据交叉链路算法的实现
三余度飞控计算机最基本的工作为完成飞机计算系统各个通道的数据交换,促进数据之间实时、高效传输,进而实现对结果的分析与对比,及时发现运行中存在的故障,排除故障,为系统稳定运行提供保障[8]。三余度飞控计算机的通讯主要依靠数据交叉链路实现,其充分采用了共享内存技术,能够过得最快最高效的方式,其在设计中应用了双口RAM,其单个芯片均配备两组地址总线、控制总线与数据总线,除同时访问一个存储单元的情况,其余均可以采用两个端口在同一时间内实施对存储单元的读写,两者之间不会相互干扰[9]。其在访问过程中主要通过片内仲裁逻辑明确首先访问哪个端口。数据交叉链路算法流程见图3。
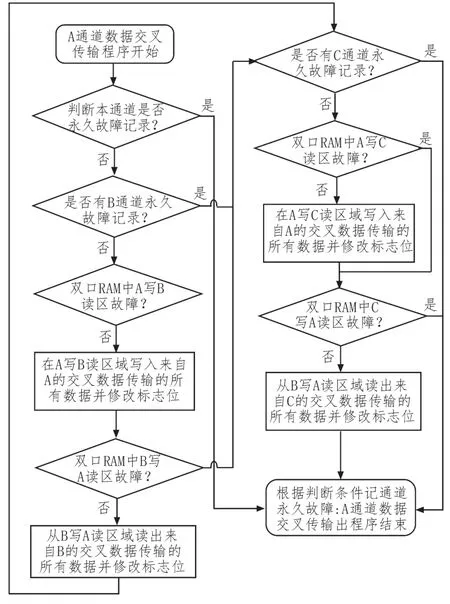
图3 三余度飞控计算机CCDL算法流程
2.2 同步计算机的跨通道同步算法实现
通常,为确保航空电子系统在发生故障后能够无缝切换,必须满足计算机3个通道能够实现同步工作,首先,3个通道自程序开始包括在运行的监控周期等阶段均要同步处理,使其能够在同一时间点采集到相同传感器的飞行参数,在同一拍工作,对于时钟误差积累要定时清除,避免输出结果不一致。采用握手方式确保各通道同步,当其进入到监控周期后,首先将所有中断关闭,然后发出逻辑高的信号,实施同步离散量,与此同时在相同时间里对另外两个通道输出的信号进行查询,待握手结束,将中断打开,输出逻辑低,确保3个通道均输出逻辑地离散,其流程如图4所示。
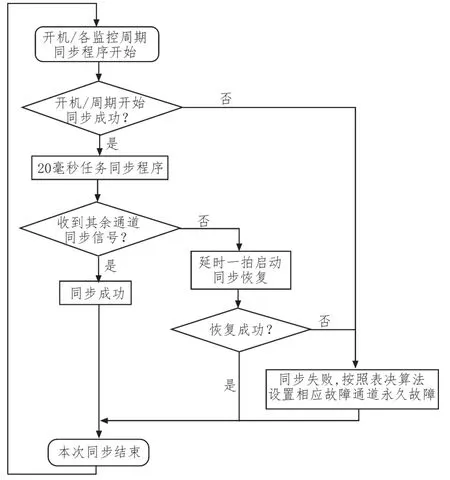
图4 三通道飞控计算机同步算法流程图
2.3 监控面算法的实现
余度系统设置监控主要是满足多个通道协调工作的需求,在设计过程中要符合可靠性、一致性及可控制律可重构3大要求[10]。该研究的飞控系统主要包括两个表决面。首先对各个余度传感器的输入信号给予飞控计算机多通道表决。采用多数通过法对离散量进行表决,将三余度传感器数据传输到飞控计算机相应的3个通道能够得到9个离散量,若所有离散量相加结果为9或0,取采样值[11],若相加<5取0,当输入值相加得1提示存在瞬态故障,当>5时取1。对控制率计算输出结果实施软件表决,剩余通道信号采用交叉数据传递,传输与执行终端输出量的正确性与飞行器安全运行息息相关,因此,必须确保输出量的可靠性。输出监控表决也需要实施监控、表决,其方式与输入监控相同。
2.4 故障监控与隔离的实现
余度系统要有专门的监控器对其系统故障进行检测,及时发现系统中存在的故障,并对其实施隔离措施,确保系统处于中立位置,将存在故障的通道断开,各通道工作状态都能够通过系统感知,进而实现对故障的检测与隔离[12]。本研究采用的是比较监控技术,其主要是利用通道间的差异对故障进行检测与识别,具有较高的覆盖率,其能够实现对所有通道数据的相互比较,并将其差值反映到触发电路。
3 可靠性建模分析
采用一阶马尔科夫过程分析法对多余度可靠性进行分析,该方法操作简单,无需考虑系统瞬态故障与多故障恢复功能,但难以对真实情况予以反应,该研究结合具体的可靠指标对一次故障、二次故障安全进行判断,并作出相应的处理[13],构建马尔科夫可靠性数学模型,其状态模型如图5所示。其中S0~S3分别代表的是4种状态[14]。通常多余度航空电子系统处理一个任务周期在20 ms,其仍存在多故障并发的可能性[15],基于这一考虑,必须采用多故障处理,根据数值计算,可以对各个系统状态概率进行计算,见表1。
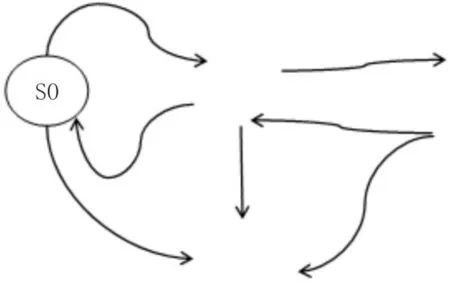
图5 多余度航空电子系统状态模型
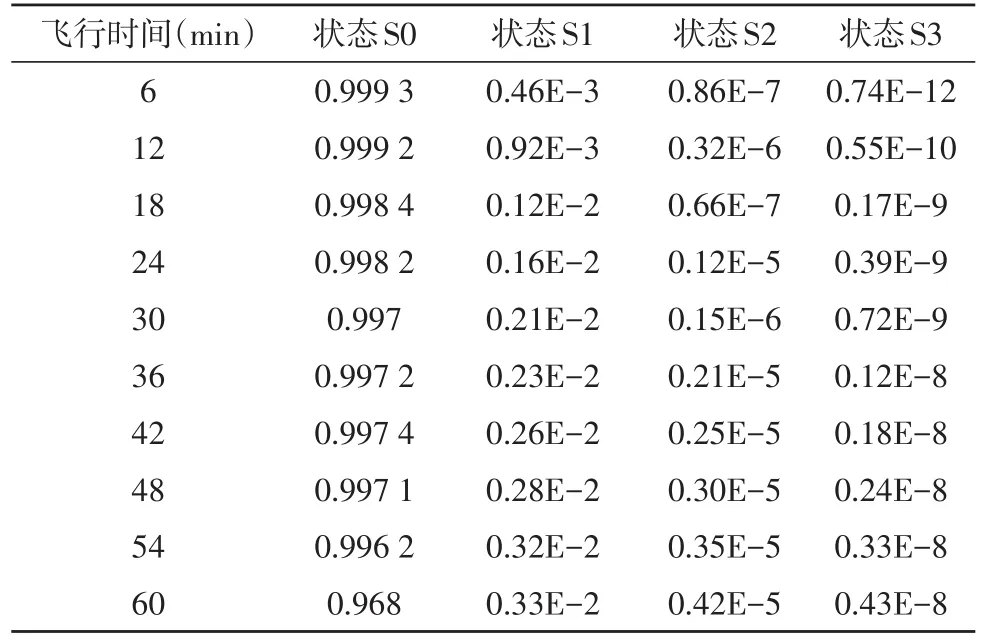
表1 系统可靠性状态模型数值解结果
4 结束语
研究探究了三余度机载航空电子系统余度架构,并对其管理技术进行分析,该研究项目已经应用于无人直升机演示验证,效果显著,其能够对未来余度系统设计提供参考。
猜你喜欢
现代电子技术(2022年2期)2022-02-13
科技与创新(2021年2期)2021-01-29
上海质量(2019年8期)2019-11-16
中小企业管理与科技(2019年9期)2019-05-28
电子制作(2018年23期)2018-12-26
西北工业大学学报(2018年4期)2018-09-07
舰船科学技术(2017年11期)2017-11-27
电子制作(2017年2期)2017-05-17
系统工程与电子技术(2016年11期)2016-11-11
西北工业大学学报(2015年1期)2016-01-19