基于平面图像检测系统的研究与设计
2018-08-25 08:14王杰
电子设计工程 2018年16期
王杰
(榆林学院陕西榆林719000)
在工业自动化及现代化不断发展的过程中,将人类视觉作为基础实现识别、测量及控制的需求逐渐发展,传统根据人为对问题的解决方式已经无法满足现代化需求,以此就产生了视觉技术,包括机器视觉非接触测量技术[1]。目前,图像处理技术发展较为迅速,以此使办公自动化系统、地理信息系统、图像通讯技术等技术及功能都已经成为可能,并且应用领域也有了有效的扩展及丰富。但是和国外相比,我国此方面的发展较为下载,目前还是在实现图像相关定性处理方面,其中的潜能和价值并没有受到重视和发展,对我国相关产业发展及提高造成了阻碍。所以,就要提高国内对此方面的研究水平[2]。
1 系统的设计需求及结构
因为计算机只能够对数字图像进行处理,那么数字图形处理的条件就是将需要测试的物体图像转化成为数字形式。另外,还要求系统能够实现收集图像的预处理及图像分割,从而得到目标物体中心点的坐标。以中心坐标得到套色误差分量,并且实现结果的输出。
通过以上系统设计需求分析表示,本文所设计的检测系统主要包括图像收集、分析及输出三部分构成。图1为基于平面的图像检测系统结构,以实际测量实物大小,使用CCD摄像机,以具体情况使用LED光源等一系列的配套设备,将摄像机对准被测的实物[3]。
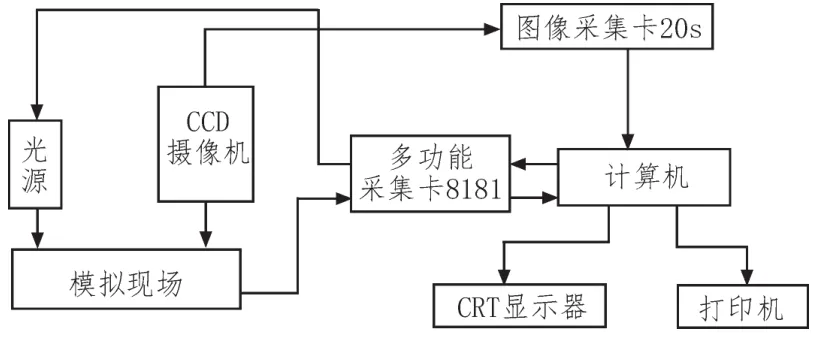
图1 基于平面的图像检测系统结构
在摄像头和被测的实物对准,将拍摄的图像成像到CCD光敏面中,在每个光敏单元势阱中存储,并且和图像照度为正比光生信号电荷,从而有效实现光电转换及电荷积累。之后到CCD移位寄存器进行转移,基于驱动脉冲实现顺序输出及转移,从而使其成为图像信号。在检测系统中,图像数字化的部件利用图像视频收集卡实现,图像数据会在计算机内存中存储,在屏幕上进行展现。对光学图像进行调整,使其为最佳状态。将图像进行冻结,使模拟图像信息转变成为数字信息,从而实现后期处理[4]。
2 系统的设计
2.1 系统的模块结构
图2为检测系统的模块结构,其主要包括两大部分,分别为中心处理单元及检测单元。
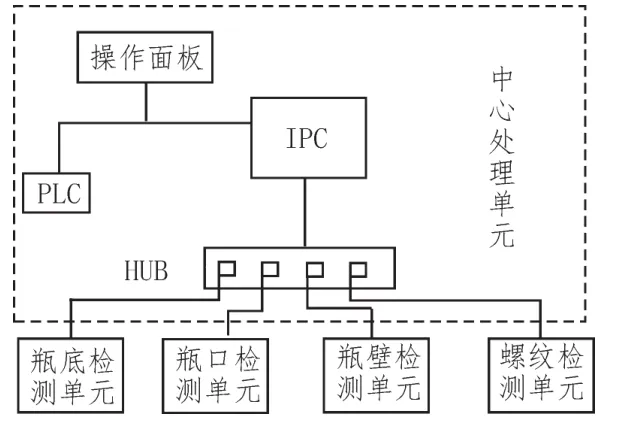
图2 检测系统的模块结构
本文设计的重点为检测部分,其中心处理单元包括可编程控制器及工控机操作面板构成。其中工控机的主要目的就是实现检测单元数据传输、显示及统计。对现场设备进行检测及控制。利用操作面板对参数进行修改,并且还能够实现功能的设置。其中可编程控制器的主要目的就是对伺服机构进行控制,并且还能够实现与工控机数据进行交流[5]。
本文所设计的检测单元还实现了实时信号处理结构的设置,其使用模块化设计及线性流水阵列结构,其主要特点为接口简单,并且方便维护及扩充,还能够支持多处理模式,满足不同处理算法的需求。
此系统能够实现图像的全面检测,为了能够有效满足系统检测实时性需求,其中的检测单元都要求独立实现自身任务,并且将检测结果利用USB集线器及接口到中心处理单元中传输。并且通过可重构技术实现针对图像检测部分可重构并行处理器的设计,其能够有效实现图像收集、处理和分析[6]。
2.2 系统的软件设计
系统软件在设计过程中主要指的是检测单元图像处理程序,图3为系统软件设计的检测算法流程。
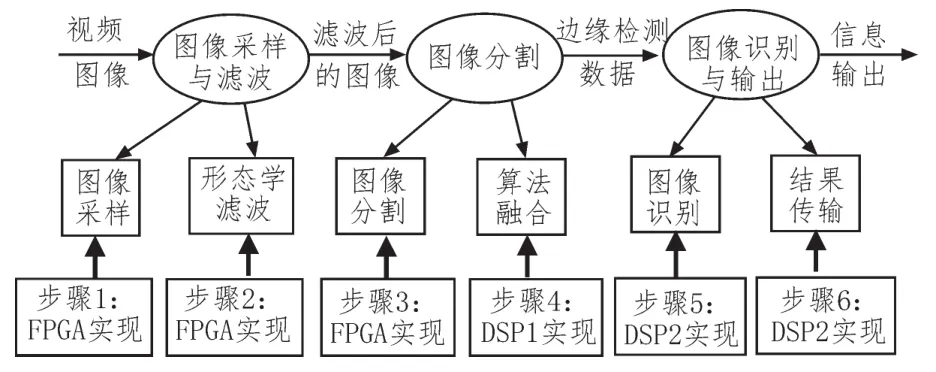
图3 系统软件设计的检测算法流程
图像检测系统中的算法较多,对于图像地层处理算法一般使用FPGA实现,高层处理算法一般使用DSP实现。系统将算法对各处理单元进行分配,各单元再通过流水线方式实现任务的处理,以此使工作效率得到进一步的提高[7]。
2.3 图像收集卡的选择
图像收集卡是将CCD摄像器件中已经转换成为模拟视频信号显微图像信号朝着数字信号进行转化。图像收集卡与形成图像的质量具有密切的联系,并且也会对图像分析及数据计算可靠性及精准度造成影响。根据不同的工作需求,要使用满足自身性能及价格的图像收集卡。本文使用多媒体图像收集卡,从而有效实现图像模拟喜好A/D变换、数字信号存储等,和计算机共同实现文字、图像、图形及语音的多媒体综合处理。另外,对于图像收集卡的选择,不仅要求其能够实现图像收集和传输,还能够实现多幅图像的收集[8]。图4为图像收集卡的工作流程。

图4 图像收集卡的工作流程
2.4 图像收集和显示模块的设计
图像收集和显示模块能够有效实现图像的及时收集和显示,对图像进行抓拍。抓拍指的是将现场图像到内存中存储,之后将图像到缓冲区中进行复制,然后将图像缓冲区中的数据和BMP文件格式到硬盘中存储,显示已经调用[9]。图5为图像收集模块的工作流程。
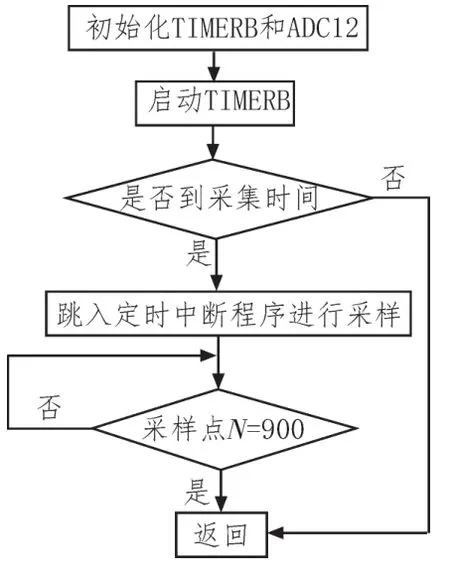
图5 图像收集模块的工作流程
首先实现收集的初始化,将图像抓拍处理进行启动,将图像实时到屏幕函数进行关闭,从而为图像到内存的收集进行中准备。对图像分辨率的参数进行设置,确定图像输入及输出窗口之后,设利用相应函数设置窗口。在设置完成之后,对图像调用到内存函数中,在内存中实现文件信息的资源分配,并且实现文件信息头的设置。在设置完成之后,对空文件实现BMP文件信息、图像数据信息的写入。假如函数成功执行,那么就对磁盘实现BMP文件的写入,从而图像抓拍工作就完成[10]。
2.5 图像处理模块
图6为模块以收集图像对象特点实现的图像处理模块设计。
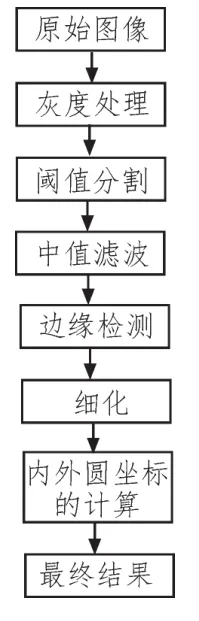
图6 以收集图像对象特点设计的图像处理模块
其一,灰度处理。因为收集三十二位真彩图像,其运算难度比较大,所以就要将其转变成为256色灰度图像。
其二,阈值分割。在实现图像收集的过程中,具有灰度值噪声点,可以使用阈值法将其去除。使用合适阈值,只要是灰度值在阈值中点为白色,在阈值下为黑色。从而能够将噪声进行去除,并且还能够使图像为黑白两个颜色的二值图像,便于今后处理[11]。
其三,中值滤波。使用3×3模块,将某个点作为中心,如果模块区域中只存在此点像素值,那么此点就是噪声,将像素值进行更改,从而将其去除。
其四,边缘检测。因为噪声点对于边缘检测具有一定的影响,所以使用功能Gauss算法将噪声去除,之后实现边缘检测[12]。
其五,细化。对图像实现细化处理,将图像几何特征进行有效突出,降低冗余信息量。
其六,坐标与距离的计算。使用Hough算法实现图像的处理,并诶对两个圆的距离进行计算[13]。
2.6 运动目标模糊图像恢复模块
在相关研究过程中,其观测的目标就会使用功能CCD光点探测器对运动进行探测,以此导致图像出现模拟,从而对图像质量及观测精度造成影。假如将采样时间缩短,能够降低模糊量,但是也会降低检测的灵敏度。所以,就要使用适当的处理技术,恢复模糊图像。可以使用在快速曝光阶段中对目标移动量数学规律进行观测,从而设计相应处理软件,能够在X、Y两个方面移动,以此使图像质量及观测精度进行有效保证[14]。图7为运动目标模糊图像恢复模块的结构。
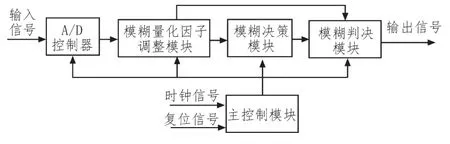
图7 运动目标模糊图像恢复模块的结构
3 系统的测量
3.1 摄像机的内参数
在实现系统测量过程中,创建空间坐标系,主要包括系统标定,在理想状态中,系统属于正交直角坐标系[15],图8为摄像机内参数的坐标系。
3.2 几何参数检测
在对检测系统进行调试之后,使用CAD2002绘制标准测试图像,并且使用激光打印机进行打印。通过图像处理,得到图像和参数计算的结果,详见图9。
通过测试结果表示,对系统检测精度造成影响的主要包括硬件自身及缺陷导致的误差。在对本文所研究的系统进行测试之后表示,此系统能够有效实现图像多因素模拟,并且还能够对传统图像检测系统中的问题进行解决,从而提高系统的检测精度和效果[16]。
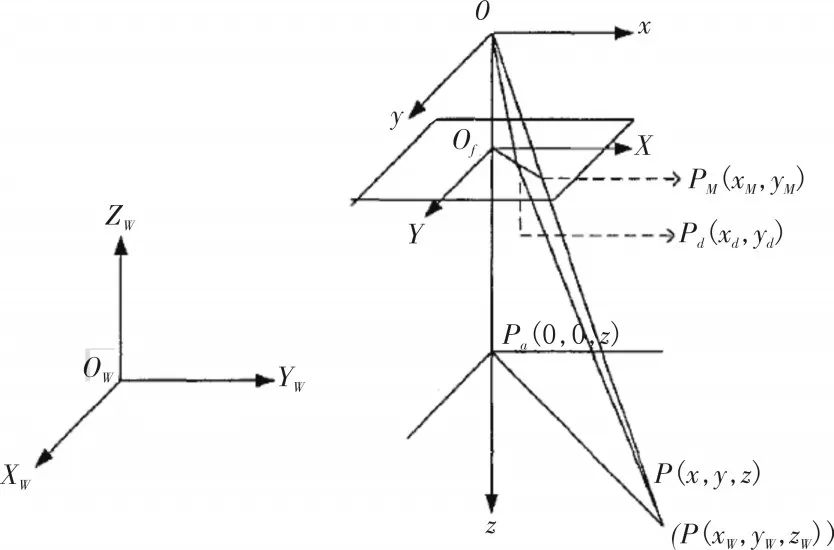
图8 摄像机内参数的坐标系
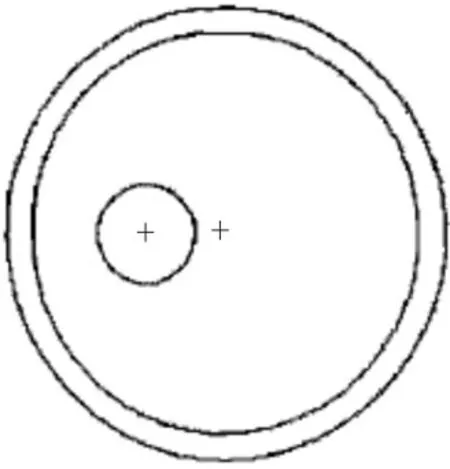
图9 图像和参数计算的结果
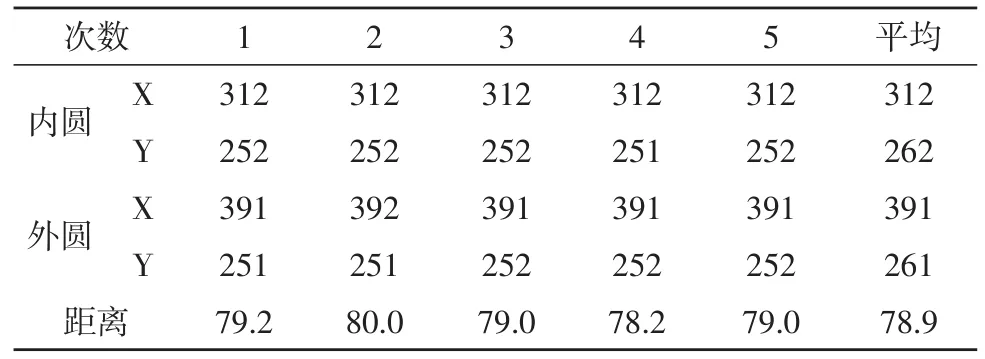
表1 实际图像圆心的距离
4 结束语
文中将检测系统和图像处理中作为本文研究的基础,对于现代工业中广泛使用图像处理检测系统进行了全面的研究,并且对系统软件、模块的设计和具体的检测原理进行了全面的分析,希望能够为同行或者相关研究人员提供参考。在本文研究过程中也得到了一定的成果,比如设计的检测系统不仅具备图像测量功能,并且还具备板卡功能,能够实现模拟信号量的转换。另外,系统还能够优化程序算法,降低程序运行时间,使运行速度得到提高。以此表示,本文所设计的系统具有良好的使用价值及应用前景。
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
作文小学中年级(2020年6期)2020-07-24
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
电气化铁道(2016年4期)2016-04-16
河南科技(2014年1期)2014-02-27
自然资源遥感(2014年3期)2014-02-27
汽车与新动力(2012年1期)2012-03-25