
微电网中基于公共负荷侧电压的改进下垂控制*
2018-08-30 05:57刘磊杨燕翔王军孙章青禹成
电测与仪表 2018年15期
刘磊,杨燕翔,王军,孙章,青禹成
(西华大学 四川省电力电子节能技术与装备重点实验室,成都 610039)
0 引 言
近年来,各国越来越重视微网的发展与应用,所以微网在各个国家的建设中也愈显重要[1]。由于微网中大多数分布式电源需通过逆变器并入微电网,因此,并联逆变器的稳定运行将极大提高系统的整体容量和可靠性。目前,并联逆变的控制策略主要采用主从控制、对等控制、分层控制和下垂控制。主从控制[2]策略的信号传输需要依靠通信线,所以各个关联的DG相距不能太远,否则很难保证可靠通信,这些缺点增大了主从控制应用的局限性[3]。在对等控制策略中,各个DG地位相当,连接形式相同,共同支撑系统的电压和频率,保证系统稳定[4]。分层控制策略结合了主从控制和对等控制的优点,但是不足之处是需要结合通信。下垂控制更多通过多个逆变器系统内部信息调控,逆变器之间不需要联络线和通信,应用下垂控制策略的系统容量易于扩展、可靠性提高、成本降低。
传统下垂控制策略通常认为当线路电抗远远大于阻抗时,电压幅值将影响系统无功功率。但是电压等级较低时线路阻感性不定,DG的无功功率不能按照设定的下垂系数均分[5],此时还与整个系统的有功分配有关。情况严重时将会产生无功环流[6]。文献[7]针对在低压微网中,线路阻抗呈阻性,提出了频率/无功和电压/有功的反下垂控制策略。该方法虽然能使无功功率均分,但没有考虑有功控制和电压控制将会产生耦合的问题。文献[8]提出了通过增大下垂增益的方法来提高无功功率均分精度,此时电压的偏离程度与无功系数呈正相关,所以要对电压偏离程度与无功功率均分精度进行合理选择。文献[9]提出了一种在DG的控制结构中引入了虚拟阻抗环节的下垂控制策略,该方法虽然能够有效解决因补偿各个线路阻抗不一致带来的无功出力不均问题,但其改变了系统结构,增加了系统的复杂度与不稳定风险。
综上,目前提高微网无功功率均分精度的方法都较为复杂。本文通过引入公共点(PCC)电压幅值反馈以及PID调节器对传统下垂控制器进行改进,将系统输出的电压幅值稳定在误差范围内,也使无功功率有效均分。仿真结果验证了本文改进控制策略的有效性。
1 传统下垂控制及功率分配分析
1.1 下垂控制原理
文中通过2个DG单元并联系统来分析下垂控制中有功功率与无功功率均分原理,系统等效电路如图1所示。

图1 DG并联系统模型
由图1得,逆变器微源输出的有功功率和无功功率为:
(1)
(2)
式中Pn、Qn分别为第n台逆变器输出的有功功率和无功功率;U0为公共点电压幅值;Un为第n个微源输出的电压幅值;Zn为第n个微源与公共点之间的线路阻抗幅值;φZn为第n个微源与公共点之间的线路阻抗相位;φn0=φn-φ0是第n个微源输出的电压与公共点电压的相位差。
实际中逆变器输出的电压与公共点处电压的相位差几乎为0,φn0≈0,φn较小,几乎也为0,对其作近似处理:sinφn=φn,cosφn≈1。当线路阻抗主要呈感性时,即φZn≈90°,有:
(3)
1.2 传统下垂控制的功率均分
1.2.1 有功功率均分
文中以感性线路阻抗为例来分析传统下垂控制的功率均分。当系统稳定运行时,各个微源逆变器频率保持一致,由式(3)可知,只需保证逆变器的参考频率相等,且φA0=φB0,则:
(4)
1.2.2 无功功率均分
nAQA=nBQB
(5)
结合式(3)中的无功功率表达式与无功/电压下垂特性方程,化简得

(6)
由式(6)可知,当且仅当式(5)和式(7)同时成立时,有UA=UB,使得各个逆变器按照设定的无功下垂系数进行无功分配。
(7)
由上面分析可得,当式(8)和式(9)成立时,传统下垂控制策略才能实现功率均分。
(8)
(9)
又由于逆变器的地理位置以及到PCC点线路阻抗等因数使得输出阻抗不一致,造成一定的随机性,式(8)和式(9)条件不能满足,所以应用传统下垂控制策略不能实现无功均分。
针对传统下垂控制策略不能实现无功均分,文中提出了引入公共点(PCC)电压幅值反馈以及PID调节器的改进功率均分控制方法。
2 基于公共点电压的改进下垂控制策略
由上面分析可知,传统下垂控制策略不能实现无功均分,且PCC点电压随着负荷的增大而降低。为了解决以上问题,提出了基于PCC点电压的改进下垂控制策略,具体框图如图2所示。

图2 改进的下垂控制框图
微电网在孤岛运行时,采集公共点电压幅值(Vpcc),将其反馈到负载电压并进行比较,然后通过比例控制器放大,电压参考值可以表示如下:
(10)
u=ke(E*-vpcc)-niQi
(11)
传统下垂控制由于是一种无线控制,考虑到公共点一般距离DG很远,在线路上的损耗就比较大,所以为了避免直接测量公共点电压的幅值,采用本地换流器输出的测量信号计算出Vpcc,假设换流器输出的有功功率为Pi,无功功率为Qi,线路阻抗为Ri、Xi,输出的电压为ui。则有:

(12)
该控制策略能够维持系统电压正常,但在应用这种方法时,系统所有换流器设置的E*必须保持一致。
这种控制策略能够很好的消除整个系统的扰动影响和计算误差及测量误差,从而使得无功功率按着下垂系数均分。
当系统处于稳定状态时,通过PID调节器输出的结果为0,从而有式(13)成立。
ke(E*-vpcc)=niQi
(13)
由式(13)知,当所有逆变器在并联运行时,且各个逆变器中的ke取相同值,那么等式的左边总是相同的,从而可以实现:
niQi=constant
(14)
所以,尽管系统中每个逆变器自身输出的电压不等,且线路阻抗不一致,但是应用文中的控制策略可以达到功率均分。由于该系统引入了公共点电压幅值反馈,有效克服了在传统下垂控制中因线路阻抗和下垂系数对系统电压降造成的影响,且整个系统的供电电压可以一直在误差允许的范围内波动。
3 基于改进电压/无功下垂控制的小信号建模与稳定性分析
3.1 小信号建模
小信号稳定是指整个系统处于某一稳定运行状态时,受到一个扰动后,不出现非周期性失步或自发振荡,然后自发地恢复到最初稳定运行状态的能力[10]。本文将通过对系统静态工作点附近线性化来进行小信号建模[11],并对其进行稳定性分析。由上文分析可得,逆变器微源输出的功率可以用如式(15)和式(16)的形式表示。
(15)
(16)
下垂控制特性曲线可用如式(17)表示:
(17)
假设系统工作在稳定状态时,设其稳定工作点为Un0,U0,φn0,然后给DG输出电压加入小的扰动,得出扰动后的功率小信号模型为:
ΔP=kpunΔUn+kpφn0Δφn0
(18)
ΔQ=kqunΔUn+kqφn0Δφn0
(19)
式中Δ()为稳定工作点的小信号偏差。






(20)

(21)
(22)
式中τ是低通滤波器的时间常数。
由式(17)可知,当系统功率出现小扰动时,电压幅值和频率的小信号响应则为:

(23)
Δf=-miΔPi
(24)
s5Δφn0+As4Δφn0+Bs3Δφn0+Cs2Δφn0+DsΔφn0+EΔφn0=0
(25)
式中:



所以系统的开环传递函数为:
(26)
因为方程式(25)能够将自由运动系统模型描述成稳态工作点Un0,U0,φn0的小信号扰动模型,则系统的响应可以通过以下式子分析得到:
λ5+Aλ4+Bλ3+Cλ2+Dλ+E=0
(27)
对上式系统特征方程的求解可以采用劳斯判据或者根轨迹的方法来对系统进行稳定性分析。
3.2 稳定性分析
第一种情况:当f=50 Hz,Un=311 V,U0=309 V,ke=1.5,kp=5,ki=100,kd=0.5,n=0.000 5,τc=0.1 s,φn0=0时,m的取值范围设0.000 001~0.000 1时,其根轨迹图变化趋势如图3所示。

图3 随着m增加系统的根轨迹
由图3可知,若实轴上的五个极点从左到右依次用λ1,λ2,λ3,λ4,λ5表示,则随着有功下垂系数m的增加,λ1极点指向负实轴的无穷远处,λ2和λ3这两个极点在实轴负半轴上相遇后分离,远离虚轴并且指向无穷远处,λ4极点向实轴负半轴上的一个零点移动,λ5极点向实轴的正方向移动。所以系统呈现阻尼特性,增加系统的响应时间,震荡幅度增大。当有功下垂系数m增大到一定程度时,λ5极点将会逐渐逼近虚轴使得系统动态响应速度变慢,远离其他四个极点,这将影响整个系统的稳定性。这种情况下系统中的五个极点都位于非右半平面,而且系统出现收敛性暂态响应,所以系统稳定。
第二种情况:当f=50 Hz,Un=311 V,U0=309 V,ke=1.5,kp=5,ki=100,kd=0.5,m=0.000 01,τc=0.1 s,φn0=0时,n取值范围设置为0~0.000 5时,其根轨迹图变化趋势如图4所示。

图4 随着n增加系统的根轨迹
由图4根轨迹图可知,随着无功下垂系数n从0变化到0.000 5,λ1移动到负无穷远处,λ2和λ3这两个极点在实轴负半轴上相遇后分离,都向着虚轴方向上延伸,系统阻尼系数减小,超调量增大。λ4和λ5极点在实轴上相遇后都沿着实轴移动,这种情况使得系统振幅有所减小。当无功下垂系数n过大时,λ4将移动到负无穷处,λ5向虚轴方向移动使动态响应速度变慢,调节时间增大,从而使得λ5成为了主导极点。图中可以发现,在整个无功下垂系数变化范围内,所有的极点都处于左半平面,所以系统稳定。
以上分析可知,整个系统比较稳定,参数选择合理时可以提高系统的暂态性能和阻尼特性。
4 仿真分析
为了进一步验证所提出的改进下垂控制策略,利用Matlab/Simulink软件建立如图5所示的微电网系统,将文中提出的改进下垂控制方法与传统下垂控制方法进行仿真比较。在搭建仿真模型时,设计两台逆变器的额定容量为1:1,系统仿真参数大小如表1所示,负载与线路阻抗参数设置如图5。0.75 s时合上断路器K,1.5 s时断开断路器K。仿真结果如图6~图11所示。

表1 DG系统参数

图5 微电网结构图

图6 传统下垂控制方法下各DG的有功分配

图7 改进下垂控制方法下各DG的有功分配

图8 传统下垂控制方法下各DG的无功分配
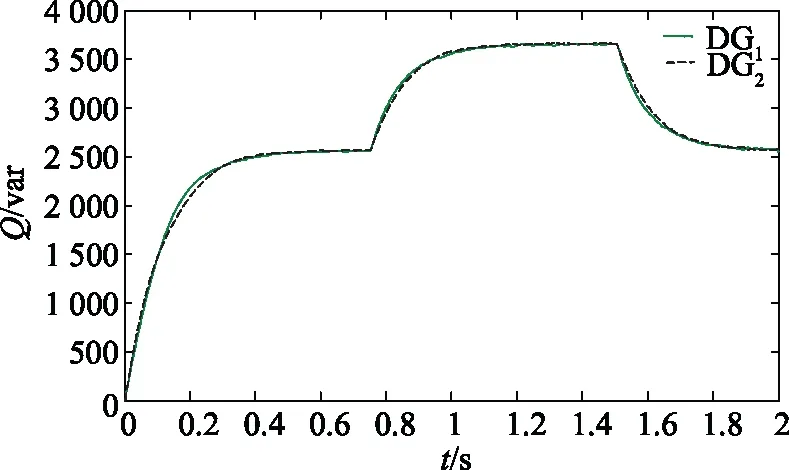
图9 改进下垂控制方法下各DG的无功分配
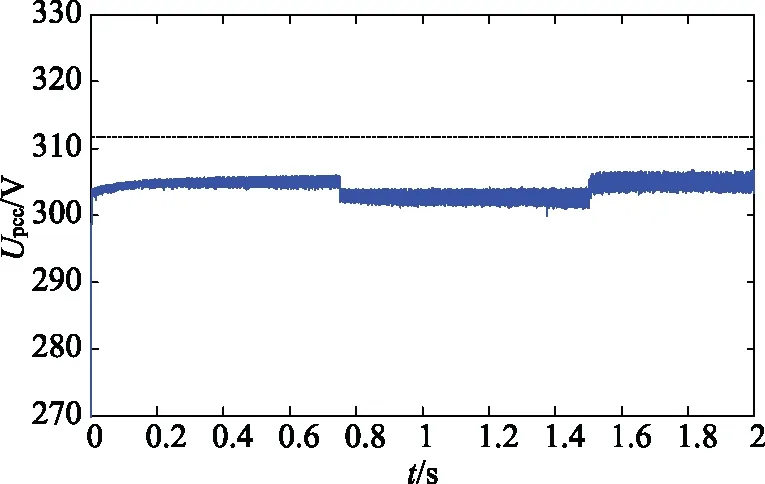
图10 传统下垂控制方法下PCC点电压波形

图11 改进下垂控制方法下PCC点电压波形
由图6与图7对比可知,后者系统采用本文提出的改进下垂控制策略,提高了有功功率均分精度。由图8与图9对比表明,后者两台逆变器在应用改进的无功/电压下垂控制策略下,无功功率能够按照设定的下垂系数均分。在图10中,PCC点处的电压随着公共负载增大而减小,最终降到302 V,超出了供电电压的误差范围;图11显示,PCC点处电压保持在311 V左右,且在误差范围内波动。
5 结束语
首先介绍了下垂控制原理,深入分析了传统下垂控制功率均分条件;其次针对传统下垂控制中无功功率不能均分问题,提出了一种基于公共负荷侧电压反馈的改进下垂控制策略;再通过对系统搭建小信号模型,检验了所提出的改进下垂控制策略对系统稳定性的影响,为系统参数的选择提供了理论依据。仿真结果表明所提出的改进控制策略能够保证系统无功功率和有功功率按照下垂系数均分,提高了系统公共点供电质量,具有良好的稳定性和动态性能。
猜你喜欢
烟草科技(2020年10期)2020-11-07
山东冶金(2019年3期)2019-07-10
通信电源技术(2018年5期)2018-08-23
消费导刊(2018年10期)2018-08-20
中学数学杂志(初中版)(2017年4期)2017-08-28
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
音乐探索(2015年3期)2015-12-05
电测与仪表(2015年18期)2015-04-12
电测与仪表(2015年1期)2015-04-09
