健康人不同姿势站立和步行时姿势图参数的重测信度研究
2018-08-31 03:10陆蓉蓉高天昊李策郭帅王志勇白玉龙
中国康复理论与实践 2018年8期
陆蓉蓉,高天昊,李策,郭帅,王志勇,白玉龙
1.复旦大学附属华山医院康复医学科,上海市200040;2.上海大学,上海市200436;3.上海金矢机器人科技有限公司,上海市200436
目的 在脑卒中患者恢复中,维持站立位和坐位的能力对后续日常生活活动能力改善产生一定的影响。目前临床上缺乏对姿势控制能力有效的定量评价方式。本研究评价以骨盆质心为基础的姿势图参数在评价不同姿势站立和适宜速度步行时的可靠性。
方法 2018年5月17日至6月3日,纳入79例健康青年人,在智能化下肢助行机器人上分别进行双脚站立、左/右脚站立和10 m适宜速度步行评定。运动结束后由系统自动计算出姿势图参数。测试分两次进行,两次测试间隔1 d。
结果 在双脚站立姿势图测定中,额状面平均摆幅、矢状面平均摆幅、重心移动轨迹总长度和重心移动总面积的组内相关系数(ICC)>0.70;在左/右脚站立姿势图测定中,左脚站立相所评估参数的ICC>0.70,右脚站立相上述参数的ICC>0.49。在适宜速度10 m步行姿势图测定中,重心移动轨迹总长度和重心移动总面积的ICC>0.75。将受试者不同姿势站立相姿势图进行比较,发现双脚站立较单脚站立更为稳定(P<0.01),优势侧对站立稳定性并无明显影响(P>0.05)。
结论 以骨盆质心为基础进行姿势图评价能可靠地反映在双脚站立、左/右脚站立和适宜速度步行时的姿势控制,在正常人群中有较好的可重复性。
在脑卒中患者中,运动障碍是最常见的功能障碍之一,他们的跌倒风险较同年龄段的健康人显著增高。同时,跌倒也是脑卒中患者在康复过程中最容易出现的并发症之一[1]。脑卒中患者下肢肌肉力量的不对称、感觉输入减退[2]和心理因素等都会造成在运动过程中的跌倒风险增加[3-5],其姿势控制呈现不对称和不稳定的特征[6-7]。
在脑卒中患者运动功能的恢复过程中,静态站立是后续坐-站转移功能和步行功能进一步改善的第一步,确保患者能安全有效地完成静态站立是后续功能性动作有序安全出现的前提条件[8-9]。目前的康复治疗强调精准的个体化康复治疗方案,但是我们常用的评定量表则多为半定量或者定性的量表,如常用的Berg平衡量表[10]。Berg平衡量表在脑卒中患者平衡功能评定中虽然有效,但是也存在一定不足。一是存在天花板效应[11],二是它并不是一种动态的评估方法[12]。因此,很多研究开始将姿势图参数用于下肢运动功能和平衡功能的评价。有研究证实姿势图参数能可靠有效地评价某些运动过程,如蹲站运动[13]和坐-站-坐运动[14]。
为了进一步评估姿势图参数在步行过程中的应用的前景,我们设计一款智能助行康复机器人。与既往以足底压力为基础[15]的下肢机器人所不同的是,我们着眼于骨盆位置的变化,对动作的稳定性和对称性进行评价。由于静态站立是后续功能性活动的基础,本研究中首先对双脚站立、左脚站立、右脚站立和适宜速度步行时评价的可信性进行评估。
1 资料与方法
1.1 研究对象
2018年5月17日至6月3日在复旦大学附属华山医院招募健康志愿者79名为受试者,其中男性54名,女性25名,平均年龄(23.09±3.84)岁,平均身高(170.20±7.50)cm,平均体质量(62.32±1.14)kg,所有受试者都为右利手。
纳入标准:①无认知障碍;②无严重视力障碍;③无平衡功能障碍;④愿意参加试验。
排除标准:①有神经肌肉系统及肌肉骨骼系统的疾病史,如脑卒中、帕金森病等;②不稳、眩晕和感觉功能缺失等症状;③其他可能引起平衡异常的疾病;④关节炎;⑤未能纠正的视力障碍;⑥体位性低血压;⑦严重的心肺疾病;⑧服用麻醉镇静剂,或抗焦虑药、抗抑郁药。
本研究方案已经通过复旦大学附属华山医院伦理委员会审核[No.(2017)临审第(368)号]。
1.2 研究设备
1.2.1 基本原理
应用智能助行下肢机器人(iReGo),见图1。受试者佩戴完腰带后,用卡环将骨盆两侧与设备的万向结牢固连接。当骨盆移动时,带动万向结发生移动、摆动和侧倾运动。见图2。骨盆支撑结构通过采集一个编码器、四个压力传感器的信号,可以实时计算出骨盆质心(pelvic centroid)的轨迹。

图1 智能助行下肢机器人(iReGo)

图2 腰带和万向结连接示意图
如图3所示,利用左右两侧各两个压力传感器和已知的弹簧系数,可以计算出骨盆两侧沿X方向的移动量,从而计算出骨盆质心沿X方向的移动量;利用摆动编码器可以测出骨盆质心沿Y方向的摆动量。据此可以绘制出骨盆质心在XY平面内的移动轨迹。
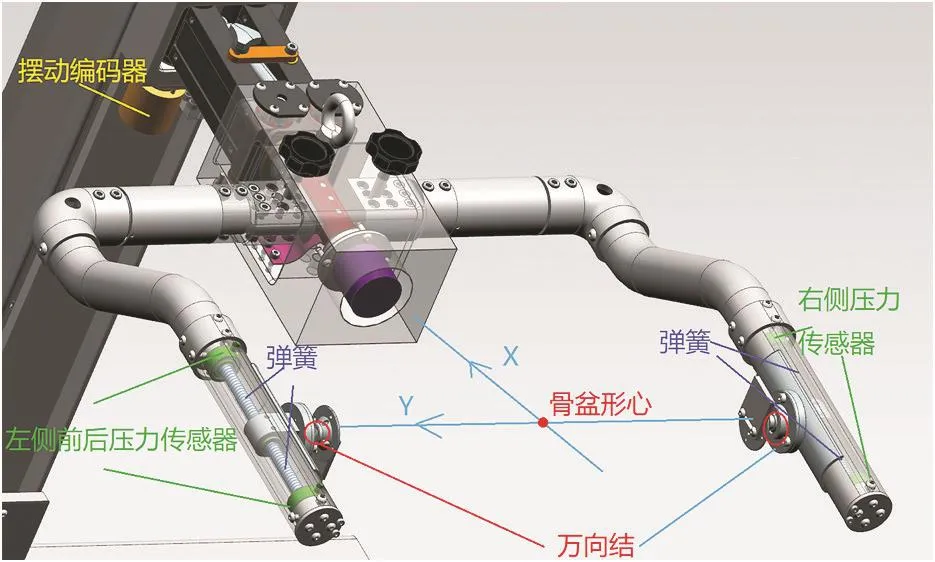
图3 结构示意图
1.2.2 参数计算原理
重心移动轨迹总面积计算方式:
(1)输入:平面上n个点P1,P2,…,Pn的坐标(xi,yi)。
(2)输出:点集凸包图面积。
1)将点集按纵坐标y值的大小重新排序,并以P1,P2,…,Pn重新标记。其中y值最小点设为P1,如有相同最小y坐标的点,则选择其中横坐标x最小点记为P1。
2)把其他各点按P1Pi与P1所在水平线所成的夹角值按升序排序,夹角相同时,以P1Pi的距离由小到大进行排序,完成对其余各点P2,…,Pn的重新编号。
3)使用矢量法依次检查相邻的3个点Pi,Pi+1,Pi+2。如果∠Pi+Pi+1Pi<180,则点由Pi前进到Pi+1;如果∠Pi+Pi+1Pi≥180,则删去顶点Pi+1,并退回到链表中前一个点Pi-1Pi。
4)遍历所有点之后,余下的点就是凸包图的顶点。
5)在已知凸包各顶点坐标的条件下,利用组合三角法求包络面积。
其计算公式为:

式中,S从i=3开始依次计算,直至凸包图顶点集的最后一点,并将所得Si-2值累计,从而得出总面积S。
重心移动轨迹总长度计算方式:
计算Pi-1Pi之间的距离,从i=1开始依次计算,直至点集中的最后一点,并将所有距离累加,从而得出总轨迹长度L。
1.2.3 研究方法
本研究为观察性研究。
一名熟悉该系统操作的康复医师作为评定者。整个评定过程在智能助行下肢机器人上进行。尽量保持两次试验环境相同。
试验前,评定者首先向受试者解释试验的目的和试验过程中所需要注意的具体事项,以求得到受试者的充分理解和配合,使其放松心情,有助于整个试验的顺利进行。在评定过程中,要求受试者正视前方,尽量将身体的重量平均地分布于两侧下肢,在整个评定过程中尽量控制身体,减少摇摆。整个试验在安静的环境下完成,并且试验过程中的视觉环境良好。
整个评定分为2次,第2次评定在第1次评定后1 d进行。
1.2.3.1 双脚站立平衡测定
受试者穿戴完毕后,站在智能助行下肢机器人中央,双脚与肩同宽,双手自然置于身体两侧,直视前方,自然站立。在测试过程中,嘱受试者尽可能保持姿势稳定。见图4。整个采集过程为1 min,包括适应时间10 s和数据采集时间50 s。

图4 双脚站立平衡测试
利用编码器测得人骨盆中心的左右摆动幅度,利用前后四个压力传感器和弹簧弹性系数计算出人前后摆动的幅度。根据人相对于最初中间位置实时的偏离情况,下位机TwinCat PLC以10 ms为周期采集人的实时摆动幅度,上位机软件以1 s为周期获取左右、前后的摆动辐度,显示在界面上并存取下来。
1.2.3.2 左/右脚站立平衡测定
受试者穿戴完毕后,单脚(左/右脚)站立在智能助行下肢机器人中央,双手自然置于身体两侧,直视前方,自然站立。在测试过程中,嘱受试者尽可能保持姿势稳定。
整个采集过程为1 min,包括适应时间10 s和数据采集时间50 s。
1.2.3.3 步行时平衡测定
受试者双手扶把手,以适宜速度直线行走10 m。行走过程中,下位机TwinCat以10 ms为周期记录行走距离信息和骨盆质心的左右摆幅信息,上位机以1 s为周期取走记录的信息。同时,为了保证记录数据的可靠性,对前5 s的数据和最后5 s的数据舍弃,以行走距离为横轴、左右摆幅为纵轴,计算左右摆幅与横轴所构成的绝对面积、左右摆幅与横轴构成曲线的总线长。

1.3 姿势图参数
本研究采用姿势图参数来评估双脚站立、左/右脚站立和适宜速度10 m步行中的姿势控制情况。双脚站立和左/右脚站立平衡测定中的姿势图参数包括额状面平均摆幅、矢状面平均摆幅、重心移动轨迹总长度和重心移动轨迹总面积。在适宜速度10 m步行测试中的姿势图参数包括重心移动轨迹总长度和重心移动轨迹总面积。
1.4 统计学分析
采用SPSS 20.0对所得数据进行分析处理。均数差异比较用方差分析。在方差分析前进行正态性检验和方差齐性检验。信度分析统计方法采用组内相关系数(intra-class correlation coefficient,ICC)作为评测指标,评价该运动评估方法的内部信度。ICC<0.4视为重测信度差,ICC在0.4~0.75之间视为重测信度较好,ICC>0.75视为重测信度良好[16-17]。
2 结果
正态性检验和方差齐性检验显示,前后2次测定的数据符合正态分布,方差无显著性差异(P>0.05)。
2.1 双脚站立平衡重测信度
在双脚站立姿势图测定中,所评估参数的ICC>0.70,提示具有较好或良好的重测信度。见表1。
2.2 左/右脚站立平衡重测信度
在左/右脚站立姿势图测定中,左脚站立相所评估参数的ICC>0.70,提示具有较好或良好的重测信度。见表2。右脚站立相所评估参数的ICC>0.49,提示具有较好或良好的重测信度。见表3。
2.3 不同姿势站立相姿势控制的比较
受试者不同姿势站立相姿势图参数相比,双脚站立情况下额状面平均摆幅、矢状面平均摆幅、重心移动轨迹总长度和重心移动轨迹总面积均明显优于左/右脚站立相的相应参数(P<0.01);单脚站立相比较,除了右脚单脚站立相的额状面平均摆幅显著低于左脚单脚站立(P<0.001)以外,其他姿势图参数无显著性差异(P>0.05)。见表4。
2.4 适宜速度10 m步行平衡重测信度
在适宜速度10 m步行姿势图测定中,所评估的参数的ICC值都在0.75以上,提示具有良好的重测信度见表5。

表1 健康成年人双脚站立姿势图参数的重测信度

表2 健康成年人左脚站立姿势图参数的重测信度

表3 健康成年人右脚站立姿势图参数的重测信度
3 讨论
脑卒中患者对姿势的控制受多种因素的影响[18],如运动功能障碍、感觉减退或丧失、感知功能障碍和空间认知变化等[19-20]。治疗后期,维持坐站的能力会对日常生活活动能力产生较大的影响[21]。为了进一步完善评定和治疗方案,需要我们应用一些定量的评定结果[22]。我们将智能化下肢助行机器人作为媒介,提供定量的姿势评价结果。
重测信度又称再测信度,为常用信度评估方法之一,反映测验跨越时间的稳定性和一致性,即应用同一测验方法,对同一组被试者先后两次进行测查,然后计算两次测查所得分数的关系系数,相关程度高,表示前后测量一致性高,稳定性好。既往研究指出,静态姿势图参数的重测信度良好(ICC>0.75)[23-24]。
既往研究的姿势图参数以足底压力作为基础,所以在评定过程中,无法离开足底压力传感器,这从一定程度上制约了对动态过程如步行等姿势控制的定量评价。我们所设计评定方法是以骨盆质心——骨盆的几何中心——作为基础得到额状面平均摆幅、矢状面平均摆幅、重心移动轨迹总长度和重心移动轨迹总面积等姿势图参数,可以对静态站立相(双脚、左/右脚)和步行过程中的姿势控制稳定性进行评价。
在静态平衡(双脚站立相和左/右脚站立相)的姿势图评定中,除右脚站立相的重心移动总面积的ICC为0.49,其他参数的ICC都在0.70以上,显示较好或良好的重测信度,提示利用这种方式可以定量地评价患者静态平衡能力。在步行控制能力的评价中,我们对适宜速度10 m步行进行评价,重心移动轨迹总长度和总面积的ICC都在0.85以上,显示良好的重测信度,提示采用这种方式能定量地评价在步行过程中的姿势控制能力,从而丰富了姿势图参数在动态平衡功能评价中的作用。无论是在静态平衡还是在动态步行的评价中,以骨盆质心为基础的姿势图参数都具有较好或良好的重测信度,因此,应用此种姿势图参数进行评价是可行并且可靠的。
此外,我们还比较了健康受试者不同姿势站立相控制的稳定性,结果显示,双脚站立较单脚站立更加稳定,这与从常态的推论相符。将单脚站立相的姿势图参数相比,除了右脚站立相的额状面平均摆幅较左脚站立更稳定以外,其他参数在左/右脚站立相都没有显著性差异。从该结果来看,再结合受试者都是右利手的情况考虑,在健康青年人群中,优势侧并不会对站立相姿势控制带来显著影响。但这一结果也促使我们思考另一个问题,即在中老年人群中,在肌肉力量降低的情况下,优势侧下肢站立相,姿势控制的稳定性会不会更好?这需要我们设计进一步的研究来验证。
本研究的不足在于所纳入的受试者都是健康青年人,缺少中老年受试者的数据。因为健康青年人的姿势控制能力比中老年人更好,而临床工作中我们所面临的患者大多为中老年患者,可能中老年受试者的数据与患者相比更为匹配。通过收集与跌倒相关的信息,或能建立姿势图参数与跌倒发生风险的相关性。此外,本研究中所应用的设备只能反映姿势控制的稳定性,在对称性方面缺乏评价结果。但是考虑到既往也有研究[25]指出,脑卒中患者负重的不对称性改善也许与姿势控制改善之间无直接联系。因此,我们认为,通过稳定性相关参数的评价也有益于评定和治疗方案的制定。
我们会在今后的研究中进行中老年健康者人群的评定,收集与跌倒相关的信息,从而进一步评价姿势图参数在跌倒预测中的价值。我们也会在下肢运动障碍患者中进行评估,定量地反映出不同情况下的姿势控制能力,针对评定结果制定个体化治疗方案。希望通过精准评定带来精准治疗,从而进一步提高康复的疗效。
综上所述,以骨盆质心为基础进行姿势图评价能可靠地反映在双脚站立相、左/右脚站立相和适宜速度步行时的姿势控制,所测参数在健康青年人群中有较好的可重复性,提示该方法或能动态评价上述过程中的姿势控制能力。今后需要在中老年群体和患者群体中应用这种方式来进行功能评价和疗效评价,进一步探讨上述参数与跌倒发生的关系。
猜你喜欢
工矿自动化(2022年1期)2022-01-25
学生天地(2020年16期)2020-08-25
学生天地(2020年13期)2020-08-25
饮食保健(2019年24期)2019-12-24
孩子(2019年9期)2019-11-07
考试周刊(2019年22期)2019-03-18
作文小学中年级(2019年1期)2019-01-10
幸福·健康版(2018年4期)2018-04-20
环球时报(2017-12-29)2017-12-29
汽车工程学报(2017年2期)2017-07-05