高灵敏高动态超紧组合跟踪方法探讨
2018-09-03 00:46吴飞燕万国龙
导航定位学报 2018年3期
吴飞燕,丛 丽,万国龙
(北京航空航天大学 电子信息工程学院,北京 100191)
0 引言
全球卫星导航系统(global navigation satellite system,GNSS)接收机通过捕获和跟踪卫星信号实现定位功能[1]。影响捕获和跟踪性能的最主要因素是信号强度和载体动态[2]。卫星信号在室内、城市道路、丛林、峡谷等复杂环境下,会有不同程度的衰减[3]。针对弱信号的跟踪,科斯塔斯(Costas)环路常用的改进方法为加长相干积分时间并运用窄带滤波器[4];其他环路有矢量跟踪、基于离散傅氏变换快速算法(fast Fourier transformation,FFT)的频域跟踪等方法。其中本文采用加长相干积分时间的方法提高信噪比;采用FFT鉴频代替普通鉴频器,通过判断信号在频域中的峰值而准确估计多普勒频率[5]。但是这将导致环路更新慢,对动态容忍性变差。高动态产生的多普勒频移使得高灵敏环路相干积分增益产生损耗,并且FFT产生频谱扩散,影响环路的稳定跟踪。针对高动态,常采用超紧组合算法,用惯性导航系统(inertial navigation system,INS)信息计算的多普勒变化量辅助载波环,去除载体大部分动态[6]。该方法恰好可以弥补高灵敏环路无法忍受高动态的缺点。
鉴于以上分析,本文针对高动态、弱信号场景,提出了高灵敏高动态超紧组合跟踪方法。
1 高灵敏高动态超紧组合载波跟踪环算法模型
如图1所示,上半部分框图是高灵敏载波跟踪环,通过加长相干积分时间提高信噪比、FFT鉴频检测弱信号频率;下半部分是超紧组合环路,利用INS和卫星星历信息对环路进行辅助,减弱环路跟踪动态,并且组合结果对INS进行实时校正。
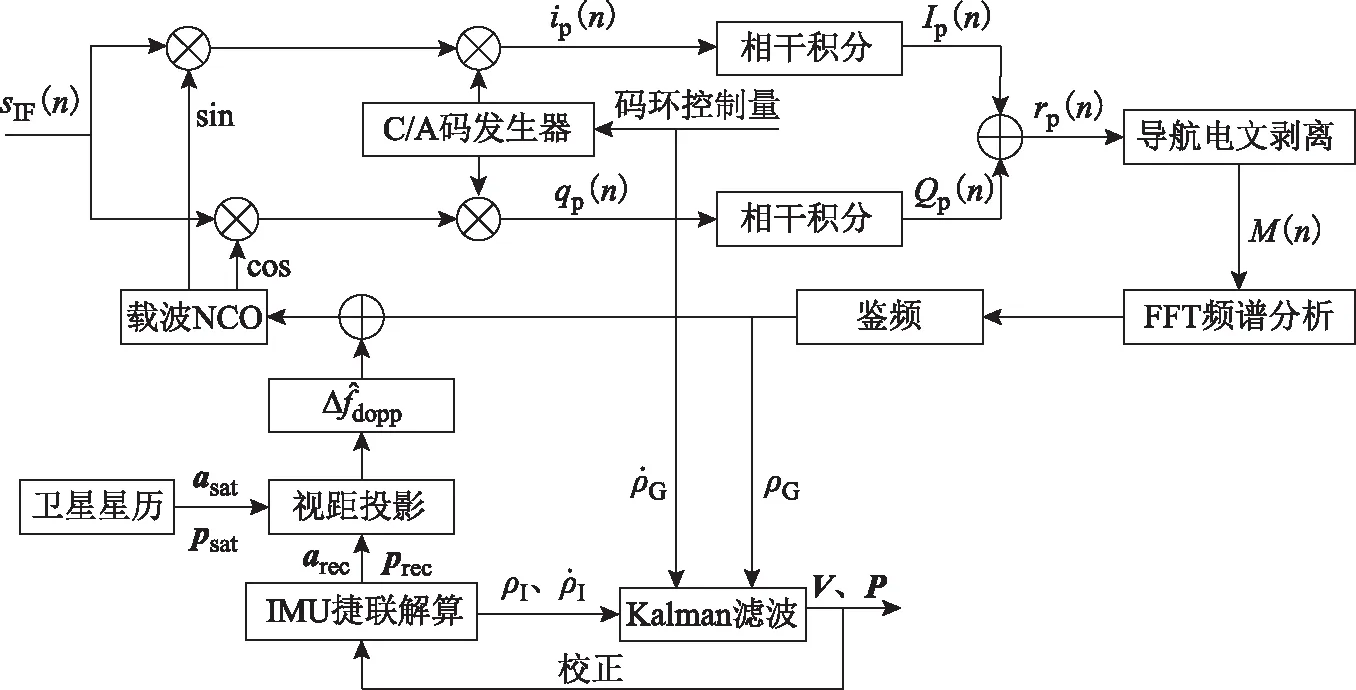
图1 高灵敏高动态GNSS/INS超紧组合载波跟踪环
首先,利用INS及卫星星历信息估计载波环更新周期内的多普勒变化量,叠加在载波数控振荡器(numerically controlled oscillator,NCO)的控制量上;接着进行混频,混频结果的低频成分为辅助多普勒误差,如果辅助信息较为准确,则该多普勒辅助误差接近于0,载波环相当于跟踪静止或者低动态信号;然后码环进行C/A码相关运算,假设自相关结果为1,则相关后的信号为有着低频率多普勒误差的导航电文;接下来对该信号进行长度为Ncoh的相干积分运算,可以提高信噪比10lgNcoh(dB);为了使FFT运算时信号不会正负抵消,需要进行导航电文剥离[7];之后需要等待N个去除了导航电文的相干积分结果,进行N点FFT运算。对FFT的结果求幅值,幅度最大点对应的频率值为多普勒频率误差的估计值[8],该值与环路更新周期内INS辅助的多普勒变化量叠加,作为载波NCO的控制量;GNSS解算星历得到的伪距、伪距率与INS推算的伪距、伪距率分别做差,差值作为卡尔曼滤波器的量测信息;INS与接收机的位置、速度及姿态误差作为观测信息,也即卡尔曼滤波结果,该结果对INS进行修正,形成整个闭合环路。
2 高灵敏环路载噪比分析

(1)
式(1)中多普勒变化率误差将造成FFT运算结果幅值衰减,由于噪声不受多普勒变化率的影响,所以其将导致的信噪比损失为
(2)
假设相干积分时间Tcoh=10 ms,多普勒初始误差为Δfd0=0 Hz,则不同FFT点数与不同的多普勒变化率误差对应的信噪比损失如表1所示。
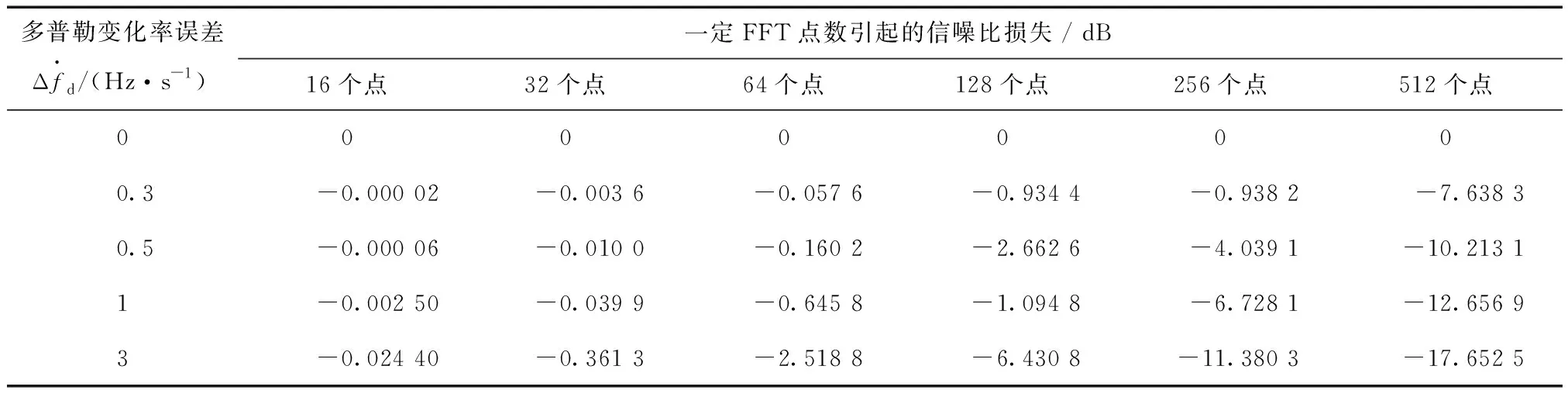
表1 不同FFT点数下不同多普勒变化率误差引起的信噪比损失
设:接收GPS信号强度为PR=-177 dB·W;噪声频谱功率密度为N0,N0=kT,其中k为玻尔兹曼常数,其值为1.38×10-23J·K-1,T为开尔文温度,设为290 K;预检噪声带宽Bpd=2.046 MHz。进行C/A码相关及长度为Tcoh的相干积分,加上基带数字信号处理损耗2 dB,FFT运算后信号信噪比(如表2所示)为[9]:

(3)
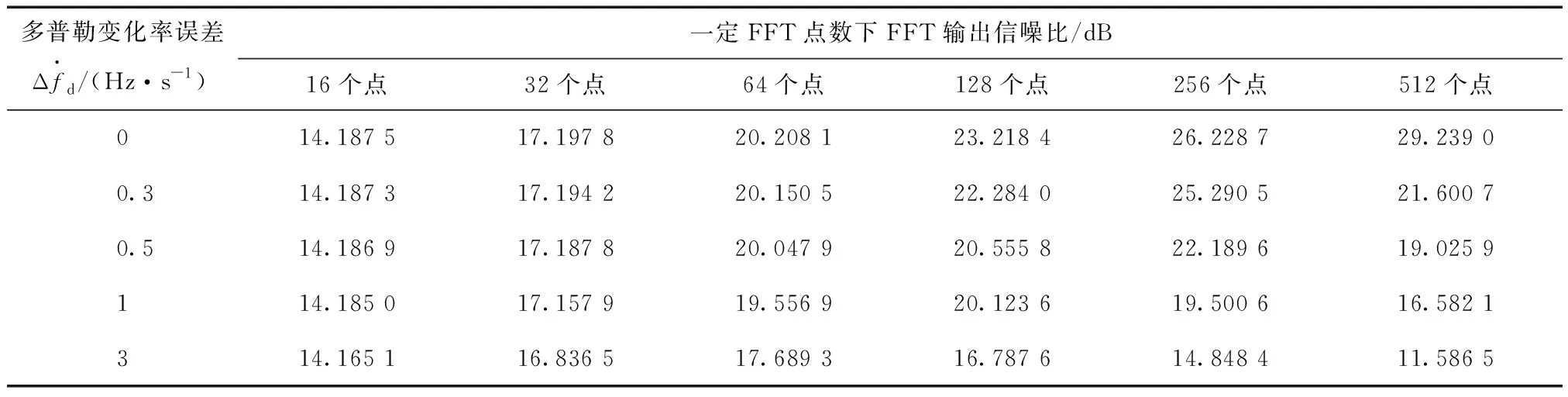
表2 不同FFT点数、不同多普勒变化率误差下FFT输出信噪比
3 INS辅助高灵敏载波跟踪环
载波环失锁,大部分是由载体动态较大导致的。多普勒变化率较大时,载波环本地复制信号与接收信号存在较大多普勒变化量误差。高灵敏环路更新慢,这一缺点将导致多普勒变化量误差加大,环路更容易失锁。故采用加速度辅助载波环的方法,利用INS与卫星二者的加速度等信息计算出多普勒变化率,再乘以INS辅助间隔,作为INS辅助间隔内估计的多普勒变化量叠加在NCO控制量上。多普勒变化率是由载体动态以及晶振误差、噪声等引起的,其中载体动态是主要因素。忽略晶振误差及噪声后,辅助间隔内多普勒变化量可表示为
(4)

(5)
由式(5)可知,辅助间隔越小辅助误差越小。图2所示为辅助时间间隔与最大多普勒变化率的误差关系。
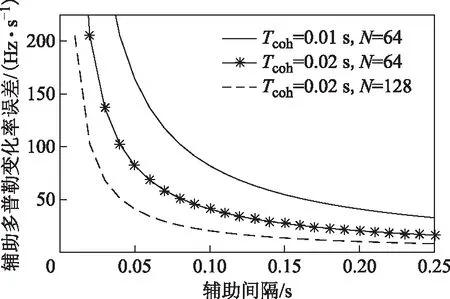
图2 辅助时间间隔与最大多普勒变化率误差关系
由图可知,假设加速度无辅助误差,辅助间隔越小,环路对加加速度容忍性越好;故辅助间隔越小越好。本文中载体位置及其加速度更新时间是INS更新时间,为2 ms;卫星加速度及其位置更新时间是环路更新时间,为640 ms。现将卫星加速度及其位置进行更新间隔内线性插值,使其更新时间也为2 ms,尽量减小辅助误差,以保证环路更新时间内多普勒误差不超过FFT鉴别门限。
4 实验与结果分析
为了验证高灵敏高动态环路的跟踪性能,用模拟器模拟载体高动态轨迹,生成中频数据、INS数据和运动轨迹。分别对高灵敏高动态环路和高灵敏环路进行测试,并将二者对高动态、弱信号的跟踪性能进行对比。
4.1 仿真条件说明
首先设置高灵敏高动态环路和高灵敏环路的相干积分时间均为10 ms,FFT点数均为64个,环路更新时间均为640 ms,高灵敏高动态环路的INS辅助间隔为2 ms。
载体动态设置为:仿真时间150 s,载体轨迹为直线运动,初始位置为东经5°、北纬5°、高5 m,航向为90°,横滚角、俯仰角均为0°。在0~50 s内载体静止;50~150 s内加加速度为0.5 m·s-3,加速度斜升增加到500 m·s-2,速度增加到25 020 m·s-1(如图3(a)、图3(b)所示)。惯导的加速度计和陀螺仪的参数如表3所示。
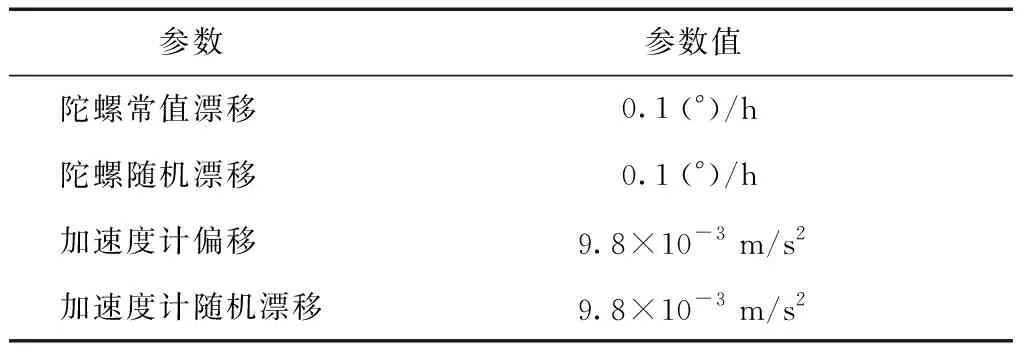
表3 INS参数
用载噪比每秒下降0.5 dB·Hz的静止模拟数据来测试高灵敏环路能跟踪的最弱信号。在95.5 s时跟踪丢失,此时估计的最低载噪比为20.74 dB·Hz,如图4所示。考虑到一定的动态余量,设定2组高动态信号的最低载噪比分别为25、30 dB·Hz,具体设置为:0~40 s,保持42 dB·Hz;40~50 s内载噪比线性下降;50~150 s内,保持25、30 dB·Hz(如图3(c)所示)。
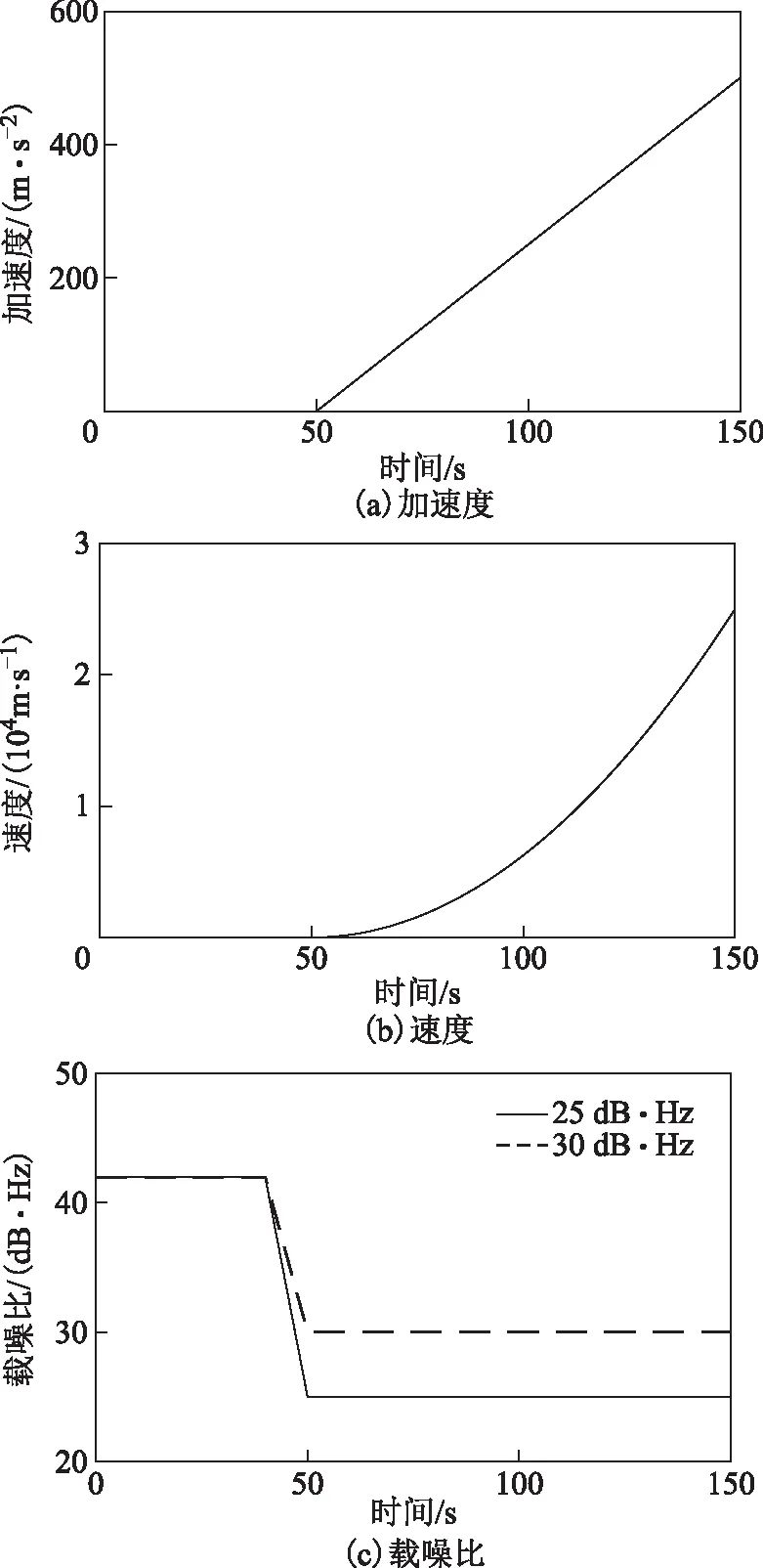
图3 加速度、速度及载噪比模型
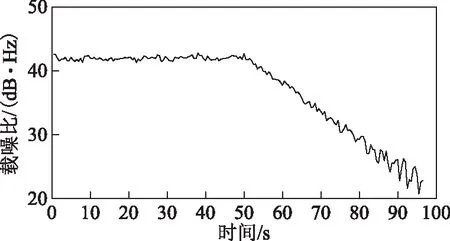
图4 静止状态高灵敏环路跟踪载噪比
4.2 仿真结果分析
1)跟踪动态性能分析
用以上模拟数据测试高灵敏高动态环路和高灵敏环路,以13号卫星为例,以多普勒跟踪失锁点为性能跟踪极限点,该点对应的动态为在该载噪比下能跟踪的最大动态。图5为高灵敏高动态环路跟踪多普勒和估计的载噪比,图6为高灵敏环路跟踪多普勒和估计的载噪比,表4为环路跟踪失锁点对应的动态。
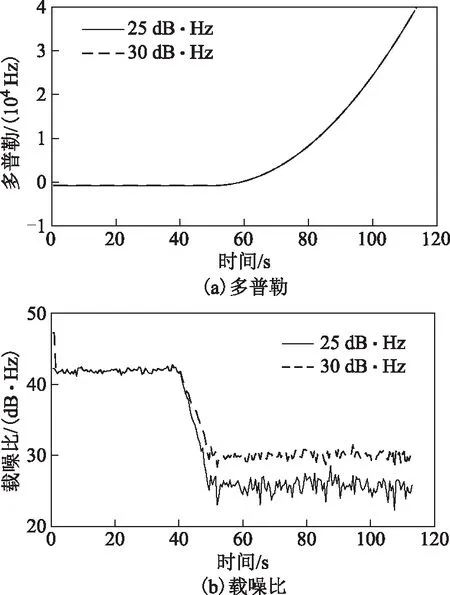
图5 高灵敏高动态环路跟踪多普勒和载噪比
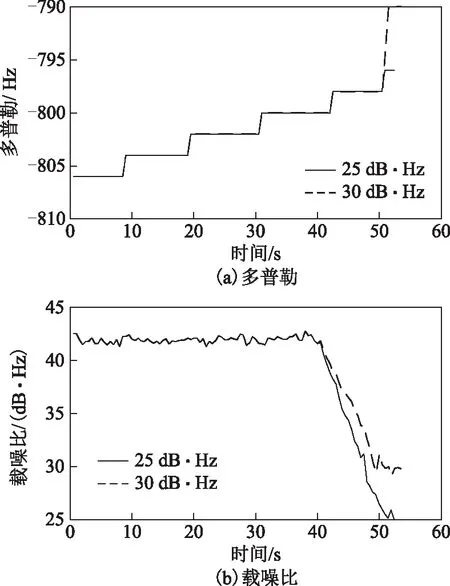
图6 高灵敏环路跟踪多普勒和载噪比
由图5可知,在载噪比分别为25和30 dB·Hz的弱信号环境下,高灵敏高动态环路分别在113及113.5 s时对信号跟踪丢失;由表4可知,此时可以跟踪的最大加速度分别为305.1 m·s-2和317.7 m·s-2,最大速度分别为9 948和10 110.00 m·s-2。由图6可知,在载噪比分别为25和30 dB·Hz的弱信号环境下,高灵敏环路分别在52.4和53.5 s时对信号跟踪丢失;由表4可知,此时可以跟踪的最大加速度分别为12和17.5 m·s-2,最大速度分别为15.0和31.5 m·s-2。2个环路对载噪比为30 dB·Hz信号的跟踪均比为25 dB·Hz信号的跟踪在动态性上有所提升。在相同的信号强度下,相对于高灵敏环路,高灵敏高动态环路对信号动态的跟踪性能得到大大提升。
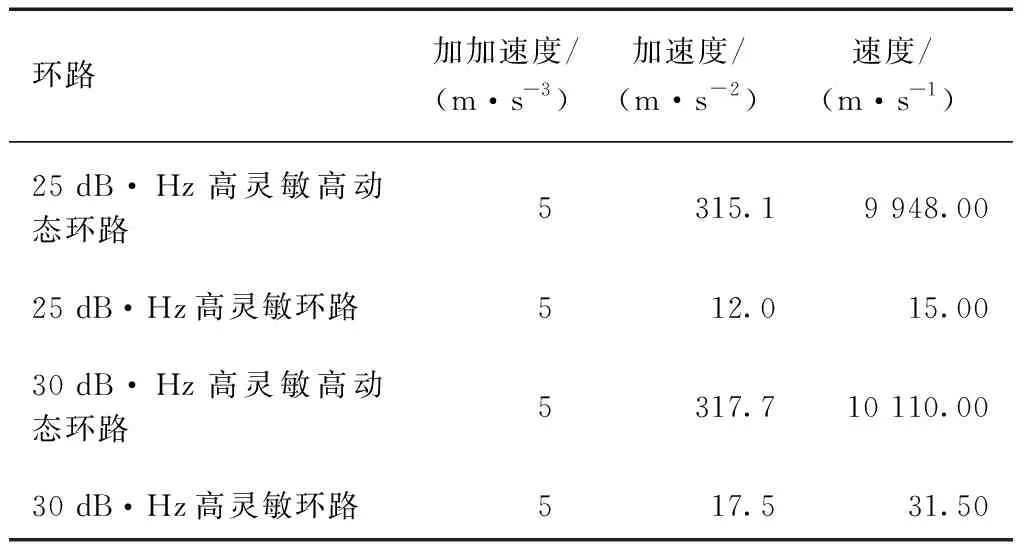
表4 高灵敏高动态环路跟踪动态
图7显示FFT鉴频器输出最大多普勒误差分别为4和2 Hz。
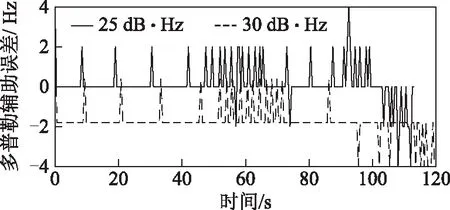
图7 高灵敏高动态环路FFT鉴频器输出
2)锁定因子分析
本文采用锁定因子(frequency lock indicator,FLI)对INS辅助环路的算法性能进行评估。其中FLI表达式为
(6)

图8所示为高灵敏高动态环路锁定因子。由图可以看出:在动态刚开始增加时,高灵敏环路的锁定因子急剧下降,甚至快速失锁;而高灵敏高动态环路跟踪性能只是有所下降。由图8(a)可知,在载噪比为25 dB·Hz时,高灵敏高动态环路锁定因子平均值为0.607 5;由图8(b)可知,在载噪比为30 dB·Hz时,高灵敏高动态环路锁定因子平均值为0.859 2,这说明高灵敏高动态环路可以跟踪高动态、弱信号。
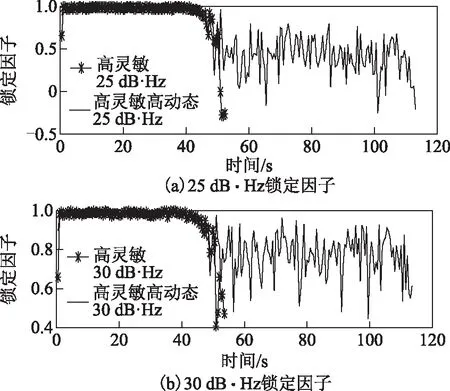
图8 高灵敏高动态环路锁定因子
5 结束语
本文提出了高灵敏高动态GNSS/INS超紧组合跟踪方法。该方法利用INS和GNSS计算载体与卫星之间的多普勒变化率,并乘以辅助时间间隔来作为多普勒变化量叠加在NCO控制量上,二者混频后,可以去除载体大部分动态,使高灵敏环路跟踪的相当于是静态或低动态弱信号;同时,高灵敏载波跟踪环采用加长相干积分时间的方法提高信噪比,并采用FFT鉴别弱信号频率,从而实现环路对高动态、弱信号的跟踪。
经过实验验证及结果分析,用低精度IMU,在信号载噪比分别下降到25和30 dB·Hz后,增加信号动态,在加加速度为5 m·s-3、加速度斜升到500 m·s-2、速度增加到25 020 m·s-1的高动态、弱信号场景下,高灵敏高动态跟踪环路可以跟踪的最大动态性能均远远高于高灵敏环路的最大动态跟踪性能;而且此时高灵敏高动态跟踪环路FFT鉴别器输出多普勒误差在4 Hz以内,锁定因子平均值分别为0.607 5和0.859 2:说明该方法可显著提升环路的动态跟踪性能,使得高灵敏高动态环路可以在弱信号、高动态情况下正常跟踪。
猜你喜欢
农业灾害研究(2022年6期)2022-08-29
城市道桥与防洪(2022年1期)2022-02-25
河北工业大学学报(2021年4期)2021-09-23
全球定位系统(2021年3期)2021-08-07
中国空间科学技术(2021年1期)2021-03-16
初中生世界·九年级(2020年9期)2020-09-21
电机与控制学报(2018年9期)2018-05-14
科技与创新(2018年9期)2018-05-05
移动通信(2017年11期)2017-06-20
软件导刊(2015年1期)2015-03-02