无人机超低空飞行控制系统优化
2018-09-10 22:15刘学业
无人机 2018年5期
刘学业
针对武器系统对无人机超低空掠海飞行要求,对某型无人机进行了超低空飞行动力建模、超低空高度信息融合技术和飞行任务剖面研究,开展了半实物仿真及飞行验证。结果表明,无人机超低空飞行控制改进优化合理、可行。
无人机超低空飞行可以模拟真实反舰导弹飞行特性,在武器装备试验训练领域具有较大应用前景。本文以现有某型成熟无人机为基础平台,通过对其飞行控制原理研究及控制策略优化改进,以期达成具备稳定超低空掠海飞行能力。
无人机超低空飞行动力建模研究
无人机控制原理
该无人机飞控系统主要由电源分系统、传感器分系统、飞行控制器分系统、遥控遥测分系统和执行机构分系统所组成,各分系统既相对独立的完成各自的功能,又相互协调,统一管理,构成了完整的飞控系统。无人机飞行控制回路采用的是数字电路和模拟电路混合方式,具有控制灵活、响应速度快、可靠性高等优点。由飞行控制系统构成的闭环负反馈系统见图1。
无人机分为两个控制方向,即纵向控制和横侧向控制。纵向控制用来控制无人机的俯仰角度的稳定以及对无人机的飞行高度进行控制;而横侧向控制则可以用来控制无人机的滚转角度和用来调节无人机的航向。两种控制方向结合既实现了对无人机飞行姿态的控制,又完成了对高度的调整,最终能够实现对无人机飞行的完整控制效果。
该无人机采用分阶段方式控制,主要分为平飞、爬升和俯冲、左右盘旋、定高与定航向、导航等不同阶段,分别采用不同的控制律进行控制,该无人机经过多架次lOOm以上飞行高度验证,飞行性能稳定可靠。
地效特性建模
该型无人机具有完整的空中气动数据与空气动力学与运动学模型,但在超低空飞行时会产生附加的地面(海面)气动效能,主要体现为附加气动力、气动力矩、气动舵效,并且参考面积越大的无人机地效特性越明显。因此,超低空掠海飞行控制技术研究需要基于已有的飞行运动学与动力学模型,完善低空地效气动特性建模,提升超低空飞行过程中的模型准确度。
根据空气动力学,地效气动特性与距离地面高度关系紧密,按照通用性设计理论,地效气动增量可以描述为高度的函数,受影响的物理量包括纵横向基本力与力矩系数以及对应的操纵导数。实际工程中由于无人机翼展与参考面积较小,对地效的敏感性相对大翼展飞机较弱,可以考虑忽略地效对横航向静稳定性导数与航向操纵导数的影响,主要对受垂向氣流影响较大的纵向力与力矩系数以及横向操纵导数进行建模。
针对无人机纵向通道数学模型,通过开展对已有数据高度、俯仰姿态、升降舵面之间的关系分析,与数学模型的配平特性进行比较,可以对比得出纵向静稳定性导数与升降舵操纵导数的差异,并予以在模型中进行补偿,通过二次校正对比,以验证模型校正的准确性。
高度控制系统设计
无人机进行30m以下高度的掠海稳定飞行过程中,干扰引起的高度控制偏差、超调等,极易引起飞行的失败,因此需要采用基于过载控制的强鲁棒控制方式进行无人机高度通道的设计,以提升抗干扰能力,增加高度安全性。
加速度与角速率是飞行器运动周期最短,对气动力与气动力矩最敏感的物理量,采用以法向加速度与俯仰角速率作为高度控制的内核,可以提升系统的抗外部干扰能力以及指令的快速跟踪能力,实现较好的鲁棒性与快速性。
外环以高度差的比例PID结构产生高度到过载指令的控制,通过高度差的积分环节可以提升系统抗内环传感器漂移的能力与指令跟踪的精度,通过高度差的PID参数综合设计可以实现高度指令的快速无超调跟踪能力。
无人机超低空高度信息融合技术研究
无人机进行超低空掠海飞行时,由于受到海浪、气流的影响,无论采用无线电高度计、气压高度计,还是全球定位系统(GPS)进行海拔高度测量,都存在一定的不准确性。因此需要设计研究出适用于超低空掠海飞行高度的测量技术。
组合高度原理
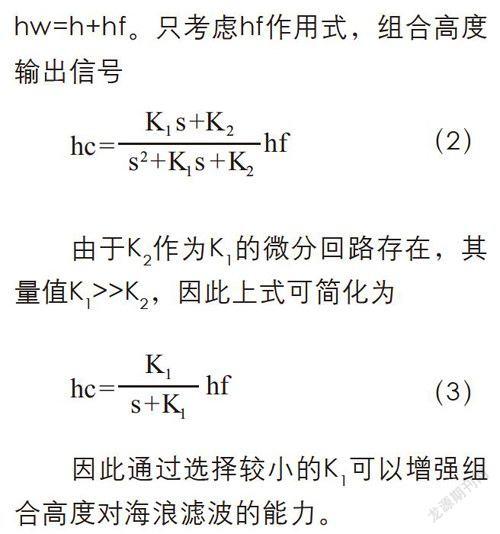
超低空高度信息融合技术拟采用不变性原理,按照梅森公式与线性叠加原理设计基于垂向加速度与无线电高度表的海浪滤波器,组合高度是由无线电高度表、垂直加速度计和算法组成。其原理是:用两种互不相关的高度测量系统测量同一高度,比较两者的结果,并予以补偿,以实现不变性原理。也就是把惯性高度输出信息和无线电高度表输出信息进行比较,然后构成反馈补偿,以保证系统的稳定性。组合高度的基本原理如下式所示。
hc =■hw (1)
其中,hc为组合高度,hw无线电高度(此处说明公式中各参数)。因此,高度组合原理是一种互补滤波的体现,即组合高度高频段取决于加速度计积分高度,低频段取决于无线电高度表的测量。
高度信息融合分析
无线电高度表的原理是通过电磁波反射测高,因此阵风、海浪、潮涌、杂波的干扰影响很大,不可忽略。如不削弱这种干扰,会使无线电高度表输出的信噪比降低,影响测高精度。噪声占据信号通路,阻塞有用信号通过,还会使信号通道提前饱和,造成系统失控。
因此通过选择较小的K.可以增强组合高度对海浪滤波的能力。姿态信息控制分析
由于姿态控制一般作为高度控制的内核,故采用陀螺仪测量出的姿态精度将直接影响高度跟踪的特性。因此,需要分析评估陀螺漂移特性,研究适应一定程度下的陀螺漂移特性的高度跟踪控制技术。采用基于积分算法的自动配平技术来予以补偿,并考虑采用基于过载的高度跟踪控制实现超低空掠海任务,姿态角作为坐标变换量,经过三角关系转换后其影响权重相对直接控制量大幅弱化,在基于已有试飞数据中的对陀螺漂移特性进行综合研究,对抗漂移积分算子进行优化设计与综合评估,实现有限陀螺漂移状态下的抗漂移控制能力。
无人机超低空飞行任务剖面研究
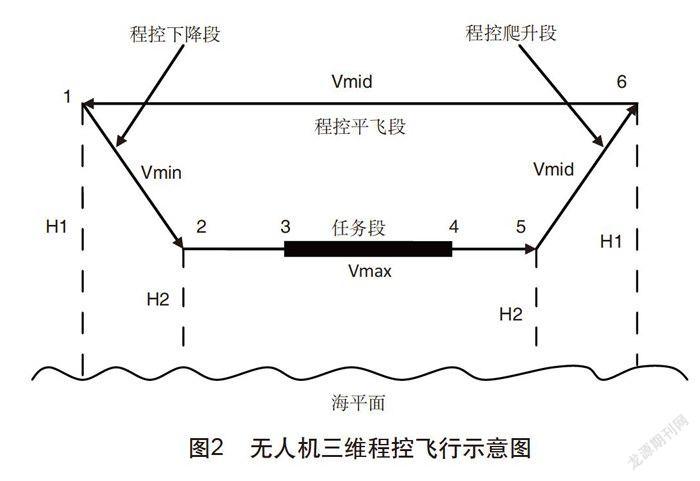
为确保飞行安全,无人机全航程段采用三维程控飞行控制方式,当飞机进入超低空飞行阶段,首先调整发动机油门至低速状态,根据下一目标点的要求,控制飞机分阶段、梯度式降高,逐渐降至目标点高度要求。控制飞机进入航线,开始进行超低空飞行,在任务段加大油门,使速度达到任务要求,此阶段高度的控制采用融合高度方式,保证飞机飞行高度的准确性及稳定性。飞过任务段后,飞机首先减小油门,将速度降至巡航状态。根据下一目标点坐标及高度要求,朝下一目标点飞行。
无人机飞行前需进行程控航路设定,设定飞机的航路坐标点,图2中的1-6点的经纬度坐标及高度值,设定航路点的任务属性。整个程控段根据航路点的任务属性,飞控分系统自动完成程控平飞段、程控下降段、任务供靶段和程控爬升段的飞行。航路点的设定由地面站完成,由操作人员在界面上直接用鼠标设计航路。
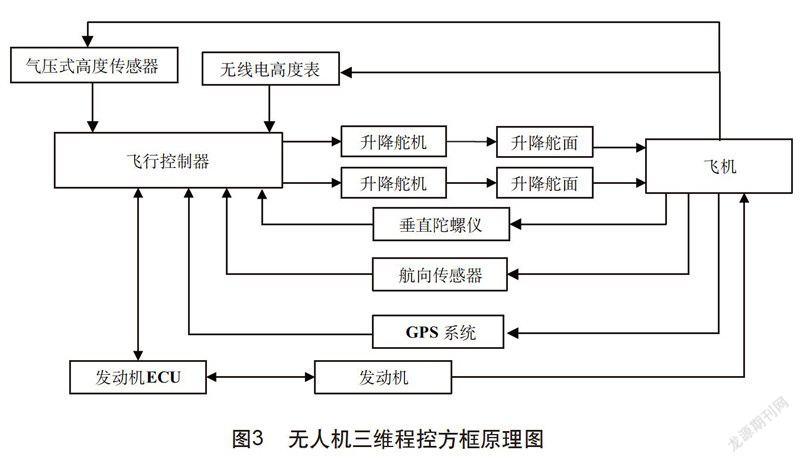
无人机飞行控制系统程控飞行时加入纵向剖面的高度控制、油门开环控制、航向控制、全球定位系统测量得到的航迹侧偏距控制,可满足低空掠海的要求,从而形成三维航路的程控飞行。三维程控方框原理图如图3所示。
半实物仿真及验证飞行
依据无人机数学模型、设计的飞行控制律以及编制的飞控软件,搭建了半实物仿真环境,开展了模拟海浪干扰、突风干扰、陀螺漂移、系统时延、气动拉偏等特性的超低空掠海半实物飞行仿真,验证了系统控制逻辑、控制策略、控制品质与鲁棒特性,并进行了2架次50m超低空飞行。飞行数据分析表明,无人机在降高拉平过程中无高度超调,高度跟踪误差为2m,并保持稳态。试验初步验证了改进优化方案可行性,后续将继续开展更低高度飞行验证。
猜你喜欢
科技创新导报(2021年33期)2021-04-17
无人机(2020年1期)2020-07-20
锦绣·下旬刊(2020年9期)2020-01-28
航海(2018年6期)2018-12-06
无人机(2018年2期)2018-09-10
数字技术与应用(2017年2期)2017-04-08
数字化用户(2014年18期)2014-11-25