S模式二次雷达目标速度跳变研究
2018-09-13 07:40孙擎宇
无线互联科技 2018年11期


摘要:S模式二次雷达作为民航雷达设备的发展方向,关注S模式二次雷达设备的运行和使用状况,对安全生产有重要作用。文章以南京祿口国际机场所使用的INDRA公司生产的IRS-20MP/L型号S模式二次雷达设备为例,介绍了S模式二次雷达的使用情况,通过对2017年影响目标速度跳变的情况统计,分析S模式二次雷达目标速度跳变的原因,进一步提出目标航迹加权平均处理的多雷达数据融合方法,为S模式二次雷达目标速度跳变的相关研究提供可借鉴的经验。
关键词:S模式二次雷达;速度跳变;多雷达数据融合
随着民航行业的飞速发展,航班量不断增加,民航空管管制人员对二次雷达设备的依赖性日渐增强,二次雷达的重要性凸显。纵观民用二次雷达的发展史,由早期的常规二次雷达到单脉冲二次雷达,再到后来的全固态二次雷达,直至当今的S模式二次雷达,功能日渐增强,信息量越来越大,安全性越来越高。进入21世纪,S模式二次雷达设备陆续在国内开始使用,成了二次雷达设备更新换代的趋势。以南京禄口国际机场为例,目前有一套S模式二次雷达设备在开放使用,预计未来南京机场将全部采用S模式二次雷达设备供空管管制部门使用。因此,关注S模式二次雷达设备在使用过程中所暴露出来的问题,并对其进行研究分析,对保障航空安全具有广泛且深远的意义[1]。
本文以南京目前在开放使用的西班牙INDRA厂家生产的IRS-20MP/L型号S模式二次雷达设备为例,对其产生的目标速度跳变问题进行研究和分析,希望能对相关技术人员有所启发。
1 目标速度跳变原因
速度跳变通常是指目标在移动过程中,速度发生抖动,突然产生速度升高或者降低的现象。管制人员通过自动化显示屏幕指挥飞机,目标的速度数据是由二次雷达设备给出,通过网络传输,经过自动化设备,最终显示在管制终端。因此,管制人员所看到的目标的速度跳变,有可能是飞机真实的速度变化,也有可能是网络传输或者雷达和自动化设备所引起的。下面我们主要讨论由二次雷达设备所引起的目标速度跳变情况。在空中交通管制中,目标产生速度跳变,如果情况频发或者较为严重,会直接影响管制部门对飞机的正常指挥,严重情况可能会直接导致飞机避让或者复飞的不安全事件[2]。
1.1 目标的航迹抖动
当雷达获得目标前一次的点迹数据与后一次的点迹数据关联性较差,或者说两次数据解析出的位置信息相差超过正常范围,便会产生航迹抖动,直接反映在管制自动化屏幕上便是目标移动出现异常,移动距离突然变大或者变小,这会直接导致目标产生速度跳变[3]。2017年南京INDRA S模式二次雷达航迹抖动统计如表1所示。
回放录像,目标此时都处在大幅度转向或者直角拐弯的时间段里,姿态变化非常大。
1.2 目标的高度跳变
高度跳变是指雷达针对同一目标,接连两次解析出来的高度数据关联性较低,产生高度变化异常,如果高度变化非常大,就有可能导致目标的速度跳变。2017年南京INDRA S模式二次雷达高度跳变统计如表2所示。
经过回放录像,分析认为:(1)目标在下降过程中产生的高度跳变有可能是由于目标所处周围环境的气压产生变化所致,因为雷达地面站所获得的高度数据通常都是解析飞机上的气压高度表给出的数据而来。(2)根据资料,INDRA S模式二次雷达解析出来的高度数据会有7 m左右的误差,属于正常范围,一般不会导致目标出现速度跳变。
(3)目标在落地过程中,低于雷达天线的水平高度时,会导致雷达设备在低俯仰角条件下,波束开裂,与天线的俯仰角有关,也可归属为天线性能问题[4]。
1.3 目标航迹丢失
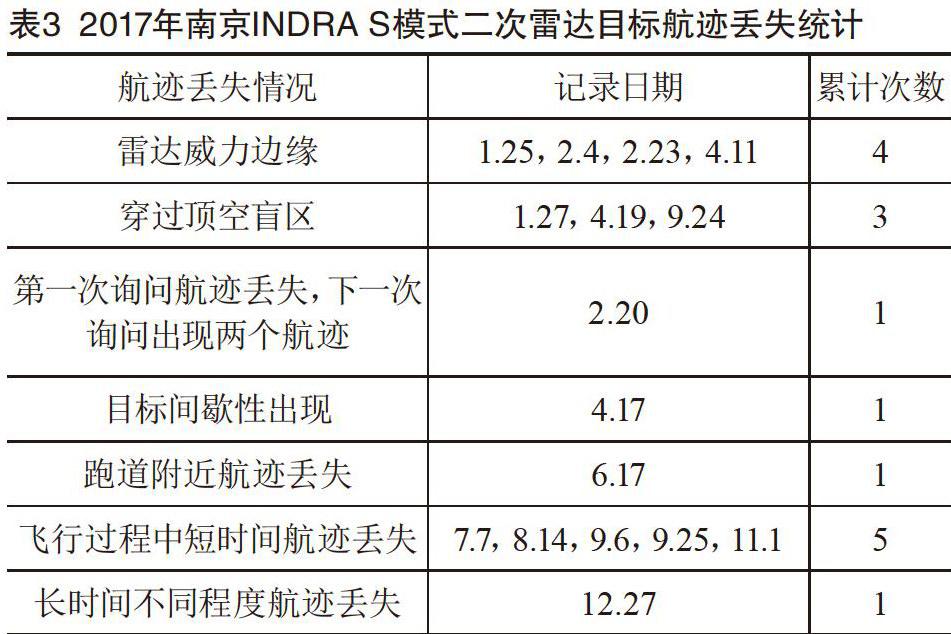
在雷達探测目标的过程中,有时会出现目标航迹丢失情况,也会引起目标的速度跳变。2017年南京INDRA S模式二次雷达目标航迹丢失统计如表3所示。
将目标航迹丢失的情况进行总结:(1)雷达设备本身属性有关,例如穿越雷达的顶空盲区、目标处在雷达的威力范围边缘等情况。(2)雷达设备故障,例如监控软件出现故障,导致第一次询问航迹丢失,下一次询问出现两个航迹。(3)目标周围环境有关,例如跑道上目标被遮挡。(4)机载设备问题,引起多雷达航迹丢失。
2 预防措施和解决方法
单雷达数据处理系统,监视范围有限,精度不高,易出现目标航迹抖动、航迹丢失和高度跳变等问题,为了提供连续的空中交通状况,确保飞行安全的最好方法就是采用多雷达数据处理系统,通过多雷达联网实现数据融合,可以大大提高监视目标的质量,减少目标速度跳变情况的发生。雷达数据处理中的多目标跟踪方法可分为两类:(1)最大似然法,包括人工标图法、航迹分义发,联合似然算法、0-1整数规划法、广义相关法等。(2)贝叶斯方法,包括概率数据互联算法、联合概率数据互联算法,最近邻域法、最优贝叶斯算法,多假设法等[5]。加权平均法是一种典型的数据融合算法,主要根据雷达的测量精度对其设置权值,精度高的权值大,精度低的权值小。权值可以在系统运行时根据需要进行灵活设置。Pow1?powN是各雷达对应的权限,para1?paraN是各雷达的目标航迹参数,para是加权后的目标航迹参数,有:
上式对目标航迹的位置、高度和速度的融合处理都合适。最后,把加权融合后的航迹用来更新对应的目标系统航迹。目标航迹加权处理流程如图1所示。加权平均法形式简单、运算量小,其融合精度要低于精度高的单站,但比精度低的单站效果好,是空管自动化系统易于实现的较为实用的数据融合方法。使用该方法,最好采用精度相近的雷达数据进行融合,否则有可能会引入其他的目标速度跳变情况[6]。
另外,航路航线设计避开雷达的顶空盲区,加强雷达设备维护,适当调整雷达天线的俯仰角以及加强与航空公司沟通等方法也可以有效地预防和解决问题。
3 结语
文中通过参考相关技术资料,以南京机场为例,对2017年INDRA S模式二次雷达所发生的目标速度跳变情况进行统计,并分析引起目标速度跳变的原因,包括航迹抖动、航迹丢失和高度跳变等情况,针对S模式二次雷达目标跳变的原因,给出“多雷达加权融合”的解决方法,该方法实用性强,使用简单,可作为自动化进行雷达信号融合的参考方法之一。
[参考文献]
[1]苏志刚.二次雷达设备[M].北京:中国民航学院出版社,1998.
[2]刘伟,胡明华.空管多雷达数据处理系统研究[J].江苏航空,2005(3):17-19.
[3]丁鹭飞.雷达原理[M].北京:电子工业出版社,2014.
[4]孙擎宇.浅谈ALENIA单脉冲二次雷达对数中放组件维修[J].科技创新与应用,2018(5):66-68.
[5]李晓峰.通信原理[M].北京:清华大学出版社,2014.
[6]张尉.二次雷达原理[M].北京:国防工业出版社,2009.