
考虑柔性悬架的轮式自行火炮仿真分析
2018-09-17 09:26刘昕运马吉胜
机械设计与制造 2018年9期
刘昕运,马吉胜
(军械工程学院 火炮工程系,河北 石家庄 050003)
1 引言
某型轮式自行火炮是我国自主研制的第一种轮式自行火炮,采用(6×6)驱动模式底盘以及100mm高膛压滑膛炮[1]。突击炮是一种用于为步兵提供短距离炮火火力支援的装甲战斗车辆。它是一种进攻性武器,要求高机动、大火力地提供迅速和强力的支援。该型武器装备的作战模式决定了射击和行驶产生的振动响应全部经过六个独立悬架传递,在实装使用过程中,某些长时间工作的自行火炮悬架横臂上产生疲劳破坏裂纹甚至断裂失效的现象。因此,分析悬架系统破坏机理以及内部应力应变规律十分必要。目前,针对悬架系统的研究很多,如考虑汽车悬架柔性的整车平顺性研究[2],或者基于悬架刚柔耦合的汽车优化分析等[3]。但是对于轮式自行火炮的悬架刚柔耦合分析极少,大部分文献均采用刚性圆柱连杆相互连接构成。传统轮式自行火炮的疲劳强度评估均是利用实车在各种道路路试和射击实验,虽然测试较为准确,但是测试时间十分冗长且耗费大量人力和经费。在后期使用时出现问题往往很难发现问题根源,难以修改。随着计算机软件的飞速发展,CAE分析技术在此领域取得了相当大的应用成果,节约大量人力财力并能及时在出现问题前后修正实体机构。故运用Solidworks、Adams、Abaqus等软件建立包含柔性身管和上下横臂的全炮刚柔耦合动力学模型,对其行驶和射击过程进行仿真,分析横臂应力应变规律,以期在后期解决火炮的静力强度和疲劳强度问题。
2 全炮刚柔耦合模型建立
2.1 火力部分模型
为了射击时身管能更加准确的模拟后座和复进运动,使用模态综合法将身管模型简化为柔体。在Abaqus中建立身管有限元模型,划分45846个八结点六面体单元并分析模态,取其前50阶模态集作为主模态导入Adams中。通过运动副连接耦合节点和炮尾、炮口制退器、摇架,利用Adams函数编辑器、数据样条曲线、用户子程序等编写炮膛合力、复进机力、摩擦力、驻退机力。其中炮膛合力直接由内弹道计算得到的膛压曲线加载,复进机力和驻退机力分别由式(1)和式(2)加载。

式中:S0—复进机折合高度;Pf0—复进机初力;X—后座位移。

式中:A0—活塞工作面积;Ap—节制环孔面积;Afj—驻退杆内腔直径面积(复进节制器工作面积);Ω—支流最小截面积;ax—流液孔面积;K1、K2—主流和支流液压阻力系数;r—液体重度;V—后坐速度。
2.2 行走部分模型
行走部分可简化为由车体、独立悬架、轮胎组成,其中悬架是指车身与车轮之间的一切传力连接装置的总称[4-5]。自行火炮的悬架系统由结构完全相同的六个不等长双横臂独立悬架构成,其结构主要分成A字形下横臂、单上横臂、转向节、液压减震器、螺旋弹簧。上下横臂与转向节直接用球副连接,与车体用转动副连接,由于不考虑转向特性,简化转向横拉杆为点面运动约束。减振螺旋弹簧和非线性液压阻尼器特性由刚度和阻尼曲线决定[1]。
同身管一样建立悬架上下横臂有限元模型,采用十节点二次四面体单元划分网格,其中上横臂划分21955个单元,下横臂划分68632个单元,横臂网格划分,如图1所示。

图1 悬架上下横臂网格划分Fig.1 Suspension Upper and Lower Arm Meshing
对模型进行模态分析,同样取前50阶模态集,生成带应力应变信息的模态中性(MNF)文件导入Adams中。
摇架底面和炮尾部分建立接触,并修改接触参数以模拟相互撞击时的缓冲结构。对高低机建模,使用作用在耳轴处的扭簧代替,高低机刚度和阻尼用Y Cai理论[6-8]等效求解接触刚度并和碟形弹簧刚度串联而成。
2.3 地面模型
随机不平路面激励是影响关键位置振动信号的主要因素之一,路面随机信号只能用各种统计特征量来表征它,可用功率谱密度来表征它的统计功率谱特征,拟合为[8]:

式中:n2、n1—有效频带的上下限;n—空间频率,表示每单位长度变化次数;Gq(no)—参考空间频率n0下的功率谱值,数值取决于路面的等级。
使用Fourier逆变换法对路面不平度进行重构。该方法是由已知路面功率谱得到对应的一系列离散Fourier变化的模值,再用正态分布随机序列经Fourier变化后取相位信息作为相角输入,构造出新的频域信号,再进行Fourier逆变换就得到所求路面不平度的随机序列。该方法理论严密,所求路面信号与标准路面谱拟合程度最好[9]。
最终组合3个子模型,建立起的全炮刚柔耦合动力学模型,如图2所示。该模型共由15个刚体和13个柔体组成。
3 仿真计算与分析
3.1 随机不平路面行驶分析
为比较得出刚柔耦合模型的优点和区别,分别对刚性横臂悬架和柔性横臂悬架自行火炮在D级随机路面上进行行驶仿真分析,2s加速时间,15km/h行驶速度,测量悬架主销内倾角与轮胎外倾角。主销内倾角是指铅垂线和主销轴线之间的夹角在车辆横向平面上的投影,车轮跳动时主销内倾角可提高车辆转向轻便性,自行火炮主销内倾角随车轮上下跳动行程的变化曲线[10],如图3所示。车轮外倾角是指车轮胎面与铅垂线的夹角,其变化曲线,如图4所示。由计算结果可以看到,刚性悬架系统与柔性悬架系统存在较大差别,这也证明了建立轮式自行火炮刚柔耦合悬架系统的必要性,柔性上下横臂能够增加模型的准确性。

图4 车轮外倾角变化Fig.4 Wheel Camber Angle Changes
3.2 静止间射击分析
在进行射击分析前,需要对射击模型进行验证,模型验证是确定模型准确性的唯一方法。将模型置于平直路面上,各轮制动,身管处于0高低角和0方向角,模拟自行火炮静止水平射击过程。将提取的各项仿真数据与相对应的实验数据进行比较,结果如表1所示。
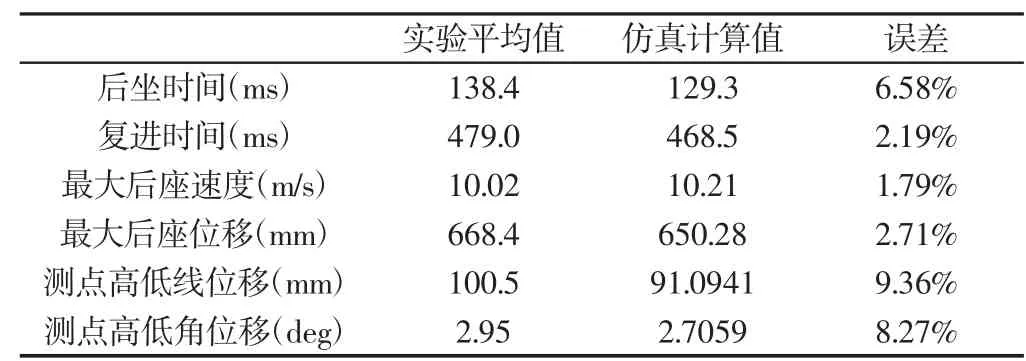
表1 模型验证Tab.1 Model Validation
对比实验和仿真数据,误差均在工程允许范围内,表明虚拟样机有一定的准确性和合理性,模型验证使接下来的射击仿真计算结果具有可信性。
为比较不同射角工况下悬架的应力状态,取4不同方向角和3不同高低角共12个射击角度,分别进行仿真分析并提取悬架最大应力和应变点,由于所有悬架中后轮的工作载荷最大,故选取后轮悬架下横臂为研究对象,如表2所示。

表2 不同射角下横臂的应力应变Tab.2 Arm Stress and Strain of Different Angles
计算结果表明,在选取的12射角中,60°方向角20°高低角状态下的最大应力应变值最大,达到567.272MPa和0.00196MPa。而90°方向角0°高低角状态下的最大应力应变值最小,只有451.026MPa和0.00148MPa。故在实际射击中应尽量减少60/20或者30/20射击角度的工况,这些射击角度更易加速悬架下横臂的疲劳破坏。
自行火炮加载炮膛合力后0.3945s时刻的后轮悬架等效应力云图,如图5所示。此时刻在下横臂上达到了最大应力值,如箭头所指的地方是应力最大的区域,此区域位于下横臂下表面靠近螺旋弹簧连接的位置,应是悬架系统最易发生破坏失效的地方,这和近年来实体火炮悬架系统产生裂纹区域是吻合的,这也证明了刚柔耦合模型的准确性。如需改进悬架下横臂的结构强度,可以采取在此区域位置加厚、倒圆角、更换材料等措施。

图5 悬架横臂Mises等效应力云图Fig.5 Suspension Arm Mises Equivalent Stress Cloud
3.3 行进间射击分析
由于该型轮式自行火炮的作战模式大多是行驶过程中射击,故还需对其进行行进间射击仿真分析。将模型置于平直路面上,选取3种典型射击角度(30/10、60/20、90/0),持续 2s的加速时间,5s时刻射击,提取编号1592的最大应力结点处的Mises等效应力随时间变化的曲线,如图6所示。
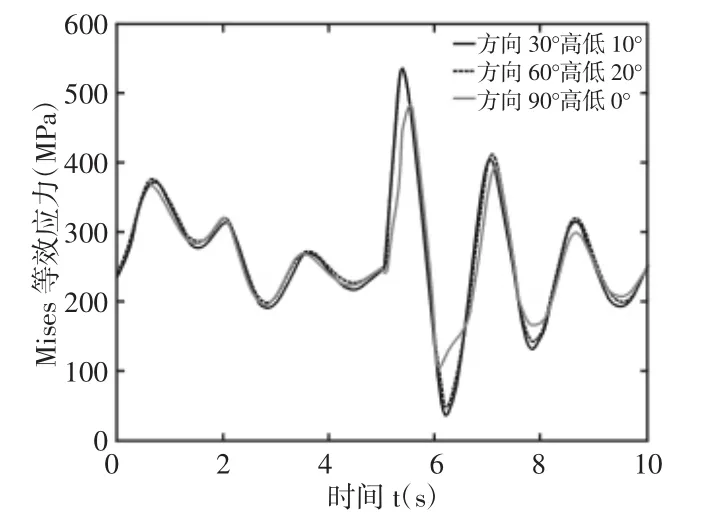
图6 最大应力点处应力曲线Fig.6 Stress Curve at the Point of Maximum Stress
30/10射击角度的悬架最大应力值为535.519MPa;60/20射击角度的悬架最大应力值为539.017MPa;90/0射击角度的最大应力值为485.938MPa。通过进一步分析12个射击角度发现,相比于静止间射击,方向角为0°30°60°时,行进间射击悬架下横臂最大应力值变小,而方向角为90°时,行进间射击悬架下横臂最大应力值反而增大。
4 结论
(1)对于轮式自行火炮,经过在随机路面行驶分析,说明有必要建立包含柔性横臂的刚柔耦合悬架系统,它能更精确的反映悬架的真实情况,为以后在轮式自行火炮的动力学模型建立提供了参考方法以及理论依据。
(2)对自行火炮模型在静止状态进行射击仿真,结果表明在60°方向角与20°高低角状态下的最大应力应变值最大,且确定了最大应力值区域位于下横臂底面靠近螺旋弹簧位置。
(3)对于行进间射击,低方向角度射击,行驶会降低后悬架最大应力值;而高方向角度(如垂直行驶方向)射击,行驶会增大最大应力值。获得的计算结果直接为传统静力破坏和金属疲劳破坏研究提供参考依据。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
文萃报·周二版(2022年24期)2022-06-16
发明与创新(2021年39期)2021-11-05
小哥白尼(军事科学)(2021年6期)2021-11-02
军民两用技术与产品(2021年10期)2021-03-16
制造技术与机床(2018年8期)2018-10-09
中国军转民(2018年1期)2018-06-08
北京汽车(2016年6期)2016-10-13
军事体育学报(2016年2期)2016-06-15
汽车实用技术(2015年8期)2015-12-26
