快响SAR卫星零多普勒波束中心姿态机动策略研究
2018-09-18 06:38,,,,
中国空间科学技术 2018年4期
,,,,
1.空间电子信息技术研究院,西安 710100 2.陕西诺维北斗信息科技股份有限公司,西安 710100
快响SAR卫星是一种以合成孔径雷达(SAR)为有效载荷的对重点区域、灾害紧急事件等快速响应卫星,在轨实时成像处理器是快响SAR卫星核心设备。波束中心多普勒频率是SAR成像处理中的关键参数,它与卫星和地面目标的相对运动(地球自转引起)、天线与卫星安装偏差和天线波束距离方位离轴角(波束在距离和方位向上偏离天线机械主轴)有关。对于X波段SAR系统,偏心率0.001 1的太阳同步轨道的SAR卫星,波束中心多普勒频率受地球自转的影响很大,全球范围内引起最大为29 kHz的多普勒频率偏移,天线波束方位向离轴角如0.46°引起3 950 Hz多普勒频率偏移,天线与卫星安装造成天线机械系与卫星本体系俯仰轴0.04°偏差引起约360 Hz多普勒频率偏移,造成多普勒频率关于脉冲重复频率模糊、方位脉冲压缩、距离徙动校正和地理定位误差增大,因而需要施加运动补偿等算法,尤其对于快响SAR卫星在轨实时成像处理器,加大实时处理算法难度。同时观测视角50°下天线波束距离向离轴角0.21°将引起斜距偏差4.68 km,天线与卫星安装造成天线机械系与卫星本体系横滚角0.07°偏差将引起斜距偏差1.6 km,从卫星姿态机动控制波束指向补偿快响SAR卫星等效斜视多普勒频率和斜距偏差被广泛应用。
文献[1-6]采用圆轨道近似推导出来的一维偏航角控制调整波束指向,通过卫星平台绕星下点方向旋转实现,仅补偿地球自转引起的波束中心多普勒频率偏移,由于实际卫星运行轨道为椭圆轨道,采用一维偏航控制后仍存在较大的多普勒频率偏移。文献[7-11]增加俯仰控制后二维偏航牵引将地球自转引起的多普勒频率补偿至0 Hz,未考虑补偿天线与卫星安装偏差和波束俯仰方位离轴角引起的多普勒频率。文献[12-14]基于地球同步轨道SAR推导出二维姿态控制方法补偿地球自转引起的多普勒频率,均未考虑天线与卫星安装偏差和波束距离方位离轴角引起的残差多普勒频率和斜距偏差,而且地球同步轨道高度约3.6×104km,很小的角度偏差导致波束指向偏差较低轨卫星更为严重。
针对上述问题,借鉴文献[14]将波束中心调整到零多普勒面内使得回波瞬时多普勒中心频率为零的思想,创新性地在跟地球固连且转动的坐标系中建立了包含零多普勒面的辅助坐标系三轴指向和实际波束中心多普勒频率为0 Hz的天线波束三轴指向模型,同时消除天线与卫星安装偏差、实际波束中心距离方位离轴角的影响,推导出地心固定坐标系内卫星本体三轴指向和三轴姿态机动参数,实现波束中心的零多普勒偏航牵引和横滚角的大角度机动。降低了快响SAR卫星实时处理器复杂度,同时使得实际波束中心最小斜距等于目标零多普勒时刻斜距,提高SAR系统发射时序设计精度,满足快响SAR卫星自主任务规划和快速机动的需求。
1 快响SAR卫星零多普勒波束中心姿态机动参数算法
算法研究涉及的空间坐标系为:地心固定坐标系Oe-XeYeZe、卫星轨道系Oorb-XorbYorbZorb、卫星本体系Osc-XscYscZsc、天线法线系Oa-XaYaZa及天线波束坐标系Obeam-XbeamYbeamZbeam,如图1所示。
快响SAR卫星零多普勒中心机动参数计算方法包含3个主要步骤,分别为观测目标场景载荷时序规划和观测参数计算、地心固定坐标系内天线法线坐标系三轴指向确定、姿态机动参数确定。
(1)观测目标场景载荷时序规划和观测参数计算
根据需要观测的目标场景中心经度、地理纬度、高程信息,计算载荷工作的时序参数如脉冲重复频率、相对采样起始时间,以及载荷条带工作模式的观测参数如观测视角、左右侧视。
首先将目标场景中心经度、地理纬度、高程信息转换为地心固定坐标系中三维位置矢量,其次高精度预报目标场景观测弧段地心固定坐标系中卫星位置矢量和速度矢量。地心固定坐标系中目标场景中心多普勒频率为:
(1)
式中:Rs为地心固定坐标系下卫星的位置矢量;Rt为地心固定坐标系下目标场景中心的位置矢量;Vs为地心固定坐标系下卫星的速度矢量;λ为载波波长;Rst为卫星与目标场景中心之间的距离。
式(1)中fdc=0时的星历时刻为t0,实际波束在天线法线系中方位离轴角引起的时间偏移Δt,以t0+Δt为整个成像时序的中心,根据方位分辨率计算成像时间Ts,则成像时间范围为[t0+Δt-0.5Ts,t0+Δt+0.5Ts]。其次,根据零多普勒时刻卫星与目标场景中心之间的斜距Rst0在斜距关联时序表中查找时序参数脉冲重复频率、相对采样起始时间。零多普勒时刻目标场景中心观测视角为:
(2)
式中:Rs0为目标场景中心零多普勒时刻地心固定坐标系下卫星的位置矢量。目标场景中心左右观测标识计算方法为:
(3)
(4)
式中:Ytemp0为零多普勒时刻地心固定坐标系中轨道面法线反向单位矢量,如果β>90°,η=-1,需要卫星机动左侧视观测目标场景;β<90°,η=1,需要卫星机动右侧视观测目标场景。
(2)地心固定坐标系内天线法线坐标系三轴指向确定
首先,为了修正地球自转引起的多普勒中心频率,建立目标场景中心各个观测时刻临时辅助坐标系,YtempOtempZtemp为零多普勒面,临时辅助系三轴指向单位矢量均在地心固定坐标系中定义:
(5)
其次,为了修正地球自转和天线波束俯仰方位离轴角引起的多普勒中心频率,使得实际照射波束中心指向Zbeam处于零多普勒面内观测目标场景方向,使得波束中心斜距与第一步时序设计参数斜距无偏差,天线波束坐标系三轴指向在地心固定坐标系中单位矢量为:
(6)
然后,根据天线波束在天线法线坐标系内的距离方位离轴角,确定天线法线系三轴指向在地心固定坐标系中的单位矢量为:
Xa=Xbeamcosθaz-Ybeamsinθazsinθtemp+
Zbeamsinθazcosθtemp
(7)
Ya=Ybeamcosθtemp+Zbeamsinθtemp
(8)
Za= -Xbeamsinθaz-Ybeamcosθazsinθtemp+
Zbeamcosθazcosθtemp
(9)
式中:θaz为波束在天线法线坐标系内XaZa平面内偏离Za轴的方位角;定义辅助计算的临时角θtemp=arctan(tanθelcosθaz),θel为波束在天线法线坐标系内YaZa平面内偏离Za轴的距离角。
(3)姿态机动参数确定
为了修正天线与卫星安装及安装偏差引起的多普勒频率,根据天线与卫星安装时给出打靶测量安装数据,计算得到天线法线系与卫星本体系安装偏差矩阵即卫星本体系至天线法线系转换矩阵Min_err,同时根据地心固定坐标系至地心轨道系转换方法[15-16]得到地心固定坐标系至地心轨道系转换矩阵为Morb/e,计算卫星轨道坐标系中卫星本体坐标系三轴指向单位矢量为:
(10)
然后,根据姿态转序,给出快响SAR卫星零多普勒中心姿态机动参数三轴欧拉角,下面给出3-2-1转序下的欧拉角参数:
(11)
式中:Xsc_in_orb(3)是矢量Xsc_in_orb的第3个元素;Xsc_in_orb(2)是矢量Xsc_in_orb的第2个元素;Ysc_in_orb(3)是矢量Ysc_in_orb的3个元素;θpitch为俯仰角;θroll为横滚角;θyaw为偏航角。其他姿态转序下欧拉角参数可根据转序对应的姿态转换矩阵[17]类似给出。
2 设计实例和仿真结果
通过设计实例和Matlab软件仿真说明了上述机动策略的有效性,此次设计实例的输入参数如表1所示。
图2(a)给出表1参数下地球自转引起的多普勒频率随卫星纬度幅角的变化关系,一轨内变化范围为-22~29 kHz;图2(b)给出表1参数下波束方位向偏离角引起的多普勒频率随卫星纬度幅角的变化关系,一轨内变化范围为3 923~3 950 Hz;图2(c)给出表1参数下安装偏差引起的多普勒频率随卫星纬度幅角的变化关系,一轨内变化范围为-357.5~-354.5 Hz。图3(a)给出了零多普勒波束中心姿态机动参数3-2-1转序下欧拉角,同时修正了地球自转、波束距离方位离轴角和天线安装偏差,修正后的波束中心多普勒频率如图3(b)所示,剩余多普勒频率为0 Hz。

表1 输入参数
快响SAR卫星在轨自主任务规划时系统设计通常将零多普勒时刻目标场景中心斜距作为SAR时序设计的依据,传统的偏航牵引姿态机动方法均未修正安装偏差和波束距离向离轴角,使得波束中心指向偏离目标场景,造成目标场景回波接收不全,影响快响SAR卫星对重点区域目标的观测性能。表2给出表1输入参数下零多普勒时刻目标与卫星斜距(时序设计参考斜距)、姿态机动控制过程中未修正各项偏差时波束中心斜距和文中姿态机动控制策略修正偏差后波束中心斜距。表2仿真结果数据显示,未修正安装偏差和距离向离轴角波束中心斜距(868.048 km)与零多普勒时刻目标与卫星斜距(874.326 km)偏差为6.278 km,并且同时修正安装偏差和距离向离轴角波束中心斜距(874.327 km)与零多普勒时刻目标与卫星斜距偏差(874.326 km)偏差为1 m,补偿至米量级。
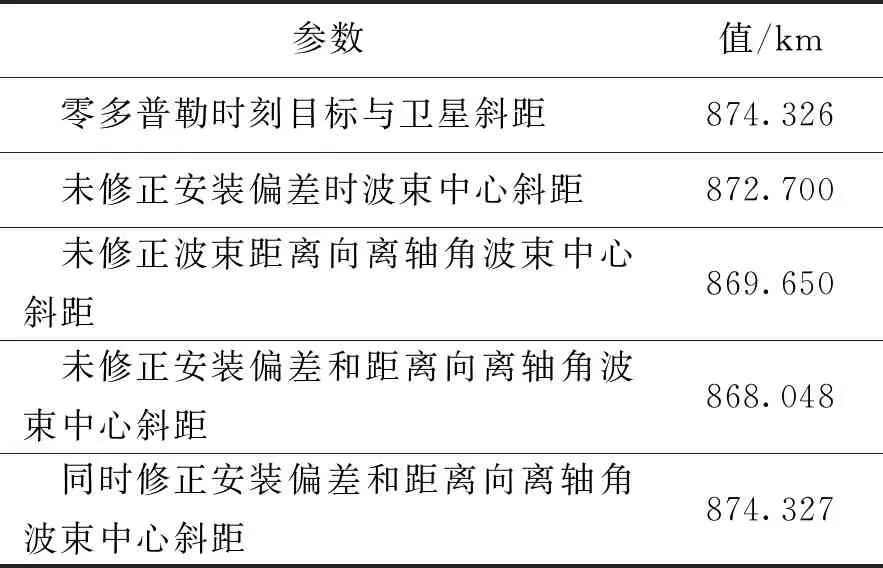
参数值/km零多普勒时刻目标与卫星斜距874.326未修正安装偏差时波束中心斜距872.700未修正波束距离向离轴角波束中心斜距869.650未修正安装偏差和距离向离轴角波束中心斜距868.048同时修正安装偏差和距离向离轴角波束中心斜距874.327
以上是安装偏差准确测量情况下的仿真结果,实际工程中,由于发射过程震动、在轨星体热变形[18]等引起安装关系变化进行引起天线波束指向变化,引起波束中心多普勒频率偏移。因此,需要通过地面定标技术定期标定波束指向偏差。可通过姿态三轴横滚角、俯仰角和偏航角预留指向偏差转换的横滚角、俯仰角和偏航角修正值上注接口,从而修正在轨安装关系变化引起的波束指向偏差和波束中心多普勒频移。通过一定的定标技术,横滚角、俯仰角和偏航角修正精度可以达到0.02°,此时引起的波束中心多普勒频率偏移最大为242 Hz,如图4所示。引起波束中心斜距与零多普勒时刻目标斜距偏差300 m。
由公式推导和仿真结果可以得出,姿态机动策略能够同时或单独修正地球自转、天线安装偏差和波束方位离轴角引起的多普勒频率偏移,使得波束中心多普勒频率为零,同时使得波束中心斜距与零多普勒时刻目标斜距偏差减小至米的量级。且实际工程定标修正精度内多普勒频率偏移为24 Hz,斜距偏移为300 m。因此,在姿态机动性能上优于传统偏航牵引方法。
3 结束语
快响SAR卫星零多普勒波束中心姿态机动策略,采用矢量法公式推导可同时消除地球自转、天线安装偏差和波束距离方位向离轴角引起波束中心多普勒频率偏移和波束中心斜距偏差,该方法具有通用性,根据天线安装及波束距离方位离轴角,可单独消除地球自转引起的波束中心多普勒频率偏移和斜距偏差,可以将其应用于SAR卫星条带模式姿态控制系统中,有效提高SAR系统时序设计精度,同时降低在轨实时处理器算法复杂度。但SAR卫星实际在轨运行后发射震动和热变形等会引起安装关系变化,因此需要进一步深入研究SAR卫星波束指向高精度定标方法,减小安装关系变化的影响。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
北京航空航天大学学报(2021年9期)2021-11-02
昆明医科大学学报(2021年2期)2021-03-29
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
现代电子技术(2020年3期)2020-08-04
舰船科学技术(2020年3期)2020-04-22
医学新知(2019年4期)2020-01-02
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21