四等水准在无人机航测像控点高程测量中的应用
2018-10-11 08:02张玉明展薪冯瑞军
资源导刊(信息化测绘) 2018年9期
张玉明 展薪 冯瑞军
(1.河南省水利勘测设计研究有限公司,河南 郑州 450016;2.新蔡县国土资源局,河南 新蔡 463500)
1 引言
目前,无人机低空航测及处理系统已广泛应用于水利工程河道治理项目,结合水利工程勘察设计对高程精度要求较高的特点,尝试将四等水准测量应用于无人机航测中,以进一步提高像控点高程精度,确保航测成果质量。本文以水利工程治理为例,详细叙述四等水准测量像控点的过程,通过应用四等水准测量航测像控点的高程,并对精度进行评估,分析四等水准测量像控点对轻小型无人机航测高程精度的提升。
2 四等水准测量航摄像控点的运用
以陆浑水库灌区治理项目为例,实验范围是河南省陆浑水库某干流中心线左右两岸各500m,海拔为100~200m,全长约12km,宽1km。里程桩号0~5+100处,测量宽度为1150 m,实验段共分105个图面,面积约20平方公里。
2.1 确定像控点数量
像控点的精度和数量直接影响航测数据后处理的精度,所以像控点的布设和选择应尽量规范严格。无人机航测采用的“积云一号”无人机自带PPK功能,有POS数据来支持其执行任务时的可靠性,对像控点的密度要求较低,对像控点的高程精度要求很高,需要在航带附近布设精度较高的像控点。像控点布设按照渠道两侧成对布设,形成网状(如图1所示)。共布设像控点航测任务区域68个、检查点11个。按照均匀布设原则,挑选其中72个点位联测四等水准,以确保其航测精度。确定航拍空域后,利用影像图、电子地图来确定像控点的大概位置和数量。
2.2 像控点布设
像控点一般布设在平坦的水平路面上,点位所处位置不应在斜坡或有高差的地方。在水泥路面可以做喷漆标志,在其他地面可喷洒白灰标志。

图1 像控点布设
无人机航测系统加载了GPS-PPK模块,可利用载波像控进行事后差分的GPS定位技术,即为动态后处理技术,其工作原理为:利用进行同步观测的一台基准站接收机和至少一台流动站接收机对卫星的载波相位观测量,再利用GPS处理软件进行线性组合,形成虚拟的载波观测量值,确定接收机之间厘米级的相对位置,然后进行坐标转换得到流动站的三维坐标。
为提高航拍模型精度,在测区内按照500m间距网格布设一对,共布设68个像控点、11个检查点。像控点均布设在航线主线有效区域内。
2.3 水准网的布设和精度要求
根据像控点的网状要求,四等水准布设为附合路线。主要技术指标如表1所示。

表1 技术指标要求
水准观测要求为:视线长度≤100m;前后视距差≤3m;前后视距差累积≤5m;黑红面读数差≤3mm;黑红面高差之差≤5mm;视线高度要求三丝能读数。测量范围为带状不连续的地形图,各水准点间距较大,水准路线较长,做单一的附合水准很难达到限差要求。水准点位置位于灌区两岸堤上或其附近,可利用地形便利在有大桥过河处通过水准联测,形成水准节点网,保证水准网点的精度。单独的四等水准附合路线长度不超过80km,环线周长不超过100km;同级网中节点间距不超过30 km,山地等特殊地段可适当放宽,但不宜大于上述指标1.5倍,确保精度达到规范要求。水准点的布设与GPS网点一致,水准要联测沿灌区堤上断面桩和水准控制点。每隔2~4 km有一个水准高程点,以达到低空无人机航测对高程控制点密度的要求。
2.4 测量数据检查项及平差结果分析
水准测量存在误差,水准测量的实测高差与理论值往往不符合,其差值成为水准路线的闭合差。
(1) 闭合水准路线:闭合水准路线高差的代数和应是零。即∑h理=0。由于存在误差,所以实测高差不为零,该数值即为高差闭合差fh=∑h测。
(2) 附合水准路线:附合水准路线的所有测段的高差代数和,理论上应等于起、终点两个已知水准点间的高差。即∑h理=H终-H起。但实测高差∑h测与∑h理不相等,高差闭合差为:fh= ∑ h测- ∑ h理= ∑ h测-(H终- H起)[1]。
高差闭合差为fh=∑h往+∑h返。
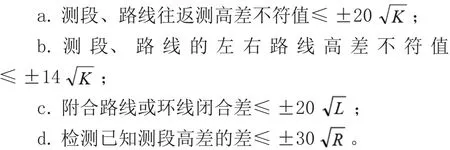
往返测高差不符值、环线闭合差和检测高差之差的限差:
参照测量数据,水准网的整体大环是闭合的,先验证环闭合差能否达到限差要求,环闭合差不超限后,根据已有控制点成果,再分别检查每段数据,直至无误。
像控点高程测量数据,水准网采用先单段平差后整体平差方法,将整体平差出的高差不符值分别平差至各段。以测段16~14为例,单段平差结果如表2所示。
经过对控制点高程进行比较,水准测量误差小于规范所要求的限差≤±20,按照本段数据计算中误差为3.16cm。水准网状路线小于闭合差限差。
2.5 像控点检查点与水准高程对比
航测数据经过处理后,得到布设作为检查点的像控点共11个。航测高程与水准高程对比如表3所示。
其中,中误差计算:n=11个,[VV]=0.509m,M=±=0.065m,完全满足无人机航测像控点≤±10cm的要求。在水利工程中,常用的大比例尺1∶500地形图对高程限差的要求为d/3(d为基本等高距),即0.167m,航摄成果统计中误差小于高程限差要求。因此,轻小型无人机航测的高程精度,除无人机自身原因外,很大程度上取决于像控点的高程精度。使用四等水准测量像控点,能够有效提高航摄成果高程精度,满足水利工程要求。
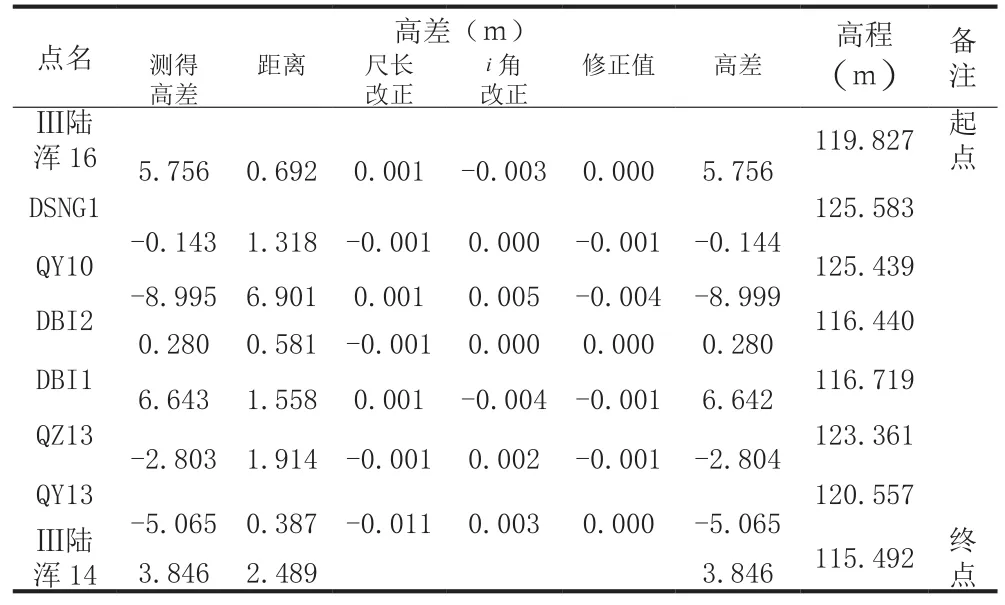
表2 平差结果表
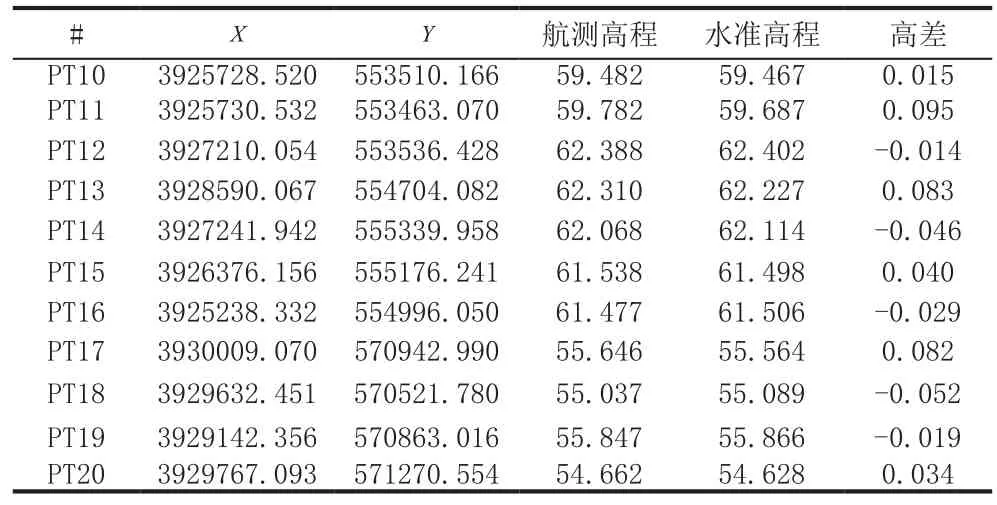
表3 航测高程与水准高程对比表
3 结论
轻小型无人机航测系统受平稳性、抗震性、载荷能力、续航时间、多传感器融合技术等多种因素干扰[2],难以有效保证航测精度,像控点的布设网形、布设密度、高程精度等因素对航摄成果的高程精度影响很大,因此通过高密度的像控点才能控制航测有效匹配和衔接,保证其平面精度,从而提高航测精度。本文通过实例论述利用四等水准测量像控点,能有效提高像控点的高程精度,达到水利工程对测绘成果的精度要求。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
煤气与热力(2021年10期)2021-12-02
天津医科大学学报(2021年4期)2021-08-21
装饰装修天地(2020年11期)2020-07-04
中国绿色画报(2017年9期)2017-09-16
计算机应用(2017年1期)2017-04-17
中国教育技术装备(2016年22期)2017-03-02
科技视界(2016年10期)2016-04-26
癌症进展(2015年3期)2015-12-18
房地产导刊(2015年6期)2015-10-21