
泵体水力模具逆向工程技术研究
2018-10-11 09:15梁晓辉
制造业自动化 2018年9期
尤 宝,梁晓辉
(洛阳双瑞特种装备有限公司,洛阳 471000)
0 引言
随着现代测量设备、计算机辅助几何设计技术的发展以及人们对设计概念理解的深入,逆向工程技术作为快速设计与制造的主要支撑技术之一正在成为研究与应用的热点[1]。逆向工程作为现代设计与制造的重要技术手段,能够有效缩短从设计到制造的周期,是帮助设计者实现并行工程等现代新概念的一种强有力工具。目前逆向工程在航空、汽车、模具、玩具等工业领域得到广泛作用,其主要应用在新产品开发和产品改型设计、产品仿制、质量检验以及快速原型零件制造等领域[1]。
逆向工程是指对已有产品原型,消化吸收和挖掘蕴含其中的产品设计、制造和管理等各方面的一系列分析方法、手段和技术的综合[2]泵是应用非常广泛的通用机械,凡有液体流动之处,几乎都有泵在工作。泵体作为离心泵压水室的一部分,与叶轮一起构成了离心泵的过流部件,能够实现将泵体中水的动能转换为势能。从水力方面看,螺旋形压水室中的流动比较理想,适应性强,高效率范围宽[3],因此螺旋形蜗壳泵体在离心泵中被广泛设计与应用,但由于螺旋形蜗壳泵体受形状限制,流道不能机械加工,尺寸形状与表面光洁度直接靠铸造来保证。泵体铸造使用铸造模具进行泵体型芯与型腔成型,通过钢液在型腔内凝固冷却后形成铸造泵体。一般泵体铸造模具分外模(图1左)与芯盒,泵体外模主要在砂箱中形成泵体的外铸造表面,芯盒主要通过砂型做出流道砂芯,然后通过定位组合模块放置在砂箱内形成泵体流道内表面,如图2所示。

图1 泵体外模模具实物

图2 泵体外模型腔与泵体芯盒砂芯
本文借助于单级离心泵铸造模具开展逆向工程研究,采用工业三维激光扫描仪作为叶片模具数据提取设备,通过对分体单个模具点云的数据提取,获得完整的叶片点云数据信息,然后经过二次处理软件实现点云数据衰减与优化处理,通过数据格式转换,为逆向后处理软件Imageware surface10.5提供足够而完整的点云数据,经过逆向软件的基准对齐与点云截面提取、点云噪声点去除和拟合点云截面曲线,最后将拟合好曲线导入三维软件PROE中进行泵体叶片三维模型创建,结合泵体其他模具测量数据,最终完成整个泵体逆向三维创建,采用本方法,为泵体模具的逆向产品三维构建提供了一种新的思路。
1 泵体水力设计方法简介
为方便泵体模具逆向工程后期数据的处理,首先需要对泵体水力设计方法进行初步了解,泵体水力设计实际常用速度系数法,为方便泵体水力计算与绘图,一般将螺旋形涡室取8个彼此成45°角端面,即用8个轴面切割涡室,求得各断面的形状和面积。设计时首先计算第Ⅷ断面,其他断面以第Ⅷ断面为基础进行确定,采用速度系数法可首先求的第Ⅷ断面面积。通过速度系数法绘制的单级泵体水力图如图3所示,其中水力各断面采用罗马字母表示。泵体水力主要设计参数有:泵基圆直径,泵隔舌半径,以及互相呈45°夹角的I~VIII断面尺寸,泵体IX、X断面尺寸以及泵出口直径等参数,通过这些参数即可表达泵体水力,同时也可采用三维设计软件进行泵体水力三维模型创建,方便泵体建模、泵体水力分析以及强度分析等计算分析。
2 泵体模具数据获取与预处理
泵体进行逆向工程,首先就要进行点云的数据的获取,目前逆向工程中常用的数据测量方式有接触式测量、非接触式测量以及工业CT扫描测量,根据不同被测物体形状与结构选择合适的测量方式。根据泵体模具测量曲面为开放式结构,在满足精度要求前提下,为提高测量效率与减低测量成本,方便后期工业化、规模化测绘,首选非接触式测量方式。
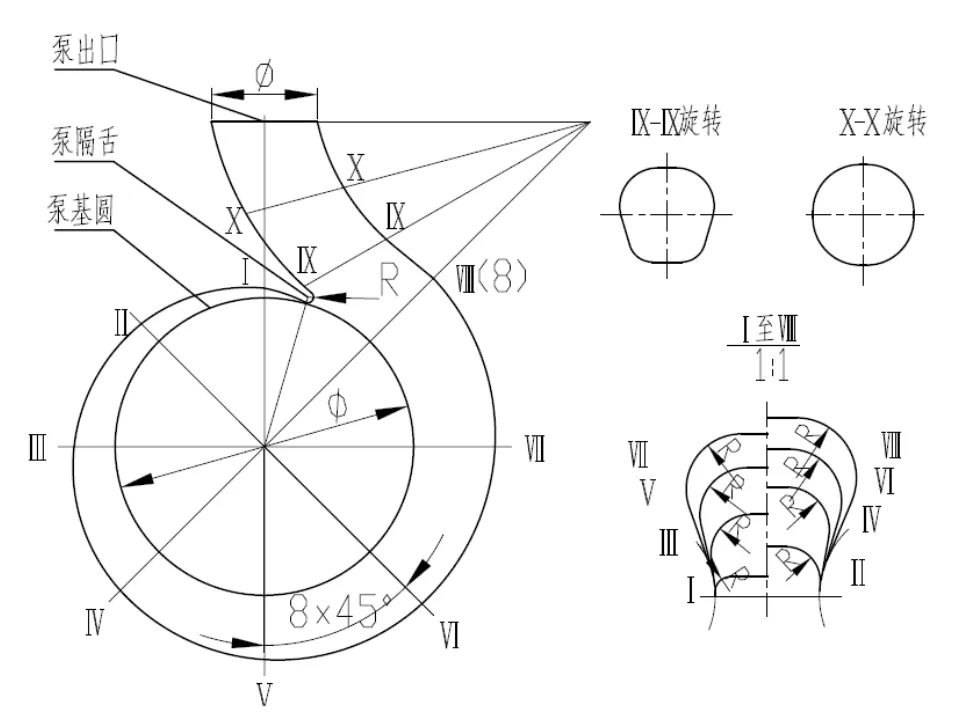
图3 泵体水力模型设计图
非接触式测量是近些年快速发展起来的一种测量技术,它主要利用光学的原理对扫描对象进行数据的采集获取[4]。本文采用扫描设备型号为天远OKIO-S-400光学三维扫描仪,如图4左所示,采用天远DigiMetric Pro摄影测量系统,如图4右所示。
通过三维光学扫描仪测量数据为asc格式,本例中单个模具测量数据点约400万,数据大小约500M,由于数据量多内存占用较大,不便于后期图形数据的处理,对电脑配置要求高,为此需要对测量原始点云数据进行处理,处理过程采用Geomagic Studio软件,通过对点云数据的导入、点云着色、点云边缘测量噪声点处理、点云统一采样以及采样过程中使用衰减,将点云数量衰减到200万左右,最后对点云进行数据计算封装(三角化),逐一导出泵体芯盒与外模的四片点云数据,保存格式为STL,如图5所示。

图4 泵体芯盒模具三维扫描
3 泵体水力点云数据处理
泵体水力点云数据处理的关键在于点云数据的基准创建与整合、基于泵体水力设计与三维设计流程进行截面点云数据提取,对点云数据的曲线重构,将完成后的曲线导入三维设计软件进行曲面的构建与实体化,结合该泵体其他组合模具尺寸测量结果,完成最终泵体的三维创建。

图5 泵体模具STL点云数据
3.1 泵体点云数据基准创建
完整的泵体模具有泵体外模与芯盒模具组成,测量点云分为4部分,如图5所示,如何将四片完整点云数据进行整合为完整泵体点云数据,需要对四片点云数据进行空间基准创建。根据泵体模具特点,以泵体模具测量中平面作为基准平面,本例中为XY平面,以基圆为中心坐标0点,垂直于基准平面XY轴为Z轴,以泵出口圆柱段中点与中心坐标原点连线作为Y轴,与Y轴垂直方向作为X轴,如图6所示,最终与参考系坐标重合。单片点云数据创建完成后,对称模具另一片点云数据的基准创建过程中,需要设置Z轴方向相反,最终将四片点云数据在空间坐标系中完成点云数据对齐。

图6 泵体模具点云数据坐标系
由于4片点云数据处理流程相似,下面就以泵体芯盒单片点云数据为例,进行单片点云数据基准创建。单片点云数据处理流程:点云数据中平面提取与处理—点云中平面拟合XY平面—将拟合后的XY平面与点云数据作为群组与系统XY平面进行对齐—涡室中心圆柱点云数据提取与中心圆拟合—拟合圆与点云数据作为群组整体与系统创建XY平面圆进行圆心对齐—提取泵体出口圆柱段点云数据拟合出Y轴—拟合后的Y轴与点云数据作为群组与系统Y轴进行对齐—最后将辅助过程点云及线条删除。
1)点云基准XY平面创建与系统平面对齐
根据点云数据提取泵体芯盒中平面点云数据,如图7(b)所示,保留原有点云数据,对提取数据误差较大区域进行误差点删除,由于选取的该平面上有凹凸不平点,建议不采用三点创建平面方式,一旦三点中的一点选择凹凸不平点,所拟合平面放大后的误差较大。建议此处采用点云拟合平面方法,具体采用Diagnose—误差分析,弹出误差分析结果图,根据后期拟合要求设置误差范围±0.5mm,将超差点云数据逐一去除,直到所有点云均在误差范围内,如图7(c)所示,采用Create-创建基准平面,拟合后的平面如图7(d)所示。

图7 泵体芯盒模具基准平面创建

图8 泵体中平面基准重合后点云
2)泵体点云Y轴创建与坐标原点对齐
针对点云数据Y轴的创建,根据图6基准选择,需要借助泵体基圆同心圆圆心与泵出口圆柱段来创建,首先创建泵体出口圆柱段圆柱中心线,首先提取泵体出口处靠近端面约20mm宽点云数据。如图9(a),保留原始点云数据,提取后的点云数据进行噪声点去除,完成后对点云数据拟合圆柱,如图9(b),对拟合后的圆柱进行误差分析,如图9(c),设定误差为±0.5mm,反复删除超差误差点数据与圆柱拟合,直到满足误差范围要求为止。连接圆柱两端圆心点,如图9(d),将圆心连线投影到XY平面上,即设置Z轴坐标为0,删除辅助点云,只保留原始点云与创建轴线。

图9 泵体中平面基准重合后点云
取泵体基圆同心圆截面点云数据下端任意高度水平线截取点云,如图10(a),截取点云点云数据采用三点拟合圆,并将该拟合圆投影到XY平面内,如图10(b),完成后将泵出口创建圆柱中心线与拟合圆圆心进行连线,如图10(c),完成点云数据Y轴的创建,将创建的Y轴与原始点云数据进行群组。在系统坐标系中创建Y轴方向直线,将创建后的系统Y轴与点云Y轴进行重合对齐。如图11(a)。需要注意点云拟合连线与系统Y轴创建直线具有方向性。最后在XY系统平面上,以原点为圆心做任意半径圆,将三点拟合后的基圆同心圆进行圆心对齐,最终将泵体单片芯盒点云数据与系统基准对齐,如图11(b)。最后将基准对齐后的数据保存为STL格式输出。

图10 泵体中平面基准重合后点云
按照此方法,将其余三片点云数据按照以上系统基准创建方法完成基准对齐,注意相互对称贴合的点云数据Z坐标方向相反。
3.2 泵体点云两瓣贴合误差分析检测
图11 泵体点云Y轴对齐与圆心对齐
泵体芯盒与外模各两组点云基准创建完成后,需要对芯盒点云与外模点云贴合后各自进行误差分析对比。以芯盒点云贴合后误差分析为例,将两组泵体芯盒点云数据同时导入软件,如图12(a)所示,以系统XY平面为基准,沿Z轴对称取XY平面上下对称平行两基准面进行点云提取,基准面到XY平面间距取10mm,如图12(b)所示,最后沿Z轴方向投影两截面点云数据,其中对一个截面点云进行着色,在投影面上,如图12(c),对相近两点云进行误差测量,本例中测得最大误差0.31mm,小于0.5mm,满足逆向处理要求,同理做两外模点云贴合后的误差,如果误差大于0.5mm,需要对较大误差点云重新进行系统基准创建,查找造成误差原因,反复对比,直到贴合后的测量误差满足最终逆向要求误差。

图12 泵体芯盒点云贴合后误差分析
3.3 泵体关键截面点云参数提取
根据泵体水力设计方法,泵体水力设计主要涉及隔舌部位、泵体的水力模型的八个断面尺寸、水力模型基圆以及泵体的出口段的三个断面尺寸,下面就以泵体贴合后的芯盒模具点云为例进行以上关键部位尺寸的逆向求解。
1)泵体隔舌尺寸测量
提取泵体隔舌部位上下芯盒点云数据,单独将该部位点云显示进行分析,如图13(a)所示,选取隔舌圆角点云比较完整区域,以XY平面对称取两平面进行点云提取,如图13(b)所示,对提取的两隔舌部位点云数据进行三点拟合圆,如图13(c)所示,测量两隔舌部位拟合圆半径分别为2.97mm与3.17mm,由于过程存在误差,设计值一般为整数,次处割舌半径取整数值3mm。

图13 泵体隔舌点云提取与隔舌圆拟合
2)泵体基圆尺寸测量
隔舌半径确定后,根据泵体水力设计图3所示,泵体基圆与隔舌圆在两圆心连线上相切,取泵体芯盒点中的一组点云,拟合出隔舌圆并投影到XY平面上,与图10方法一致,取基圆同心圆点云截面,通过三点拟合圆,将该圆投影到XY平面上,连接两圆圆心,如图14所示,测量两圆圆心距,减去隔舌圆半径就是基圆半径,本例中两圆心距78.5mm,隔舌圆半径R为3,则基圆半径为75.5mm。

图14 泵体隔舌圆与拟合圆圆心连线
3)泵体各断面点云数据提取与数据处理
对于泵体水力设计8个断面的提取,如图3所示,泵体水力第Ⅰ断面为过Y轴垂直XY平面的平面,在软件中选择Extraction,选择起始点X与Z值为0,Y值为任意值,设置断面数为8,为便于后期三维建模,同时将过泵体隔舌圆心的断面(一般称为0断面)也作出,最终断面点云如图15所示。

图15 泵体水力沿基圆9截面点云数据
对于泵体水力出口处Ⅸ、Ⅹ断面提取,采用将泵体出口处点云数据靠近XY平面单独提取一个断面,如图16(b)所示,完成后根据弯曲点云断面走向趋势,对该段点云进行曲线拟合,需要注意的是泵体水力出口位置存在一段直线段,需要在曲线拟合过程需要不断测量拟合曲线端点与周围点云误差,保证直线段与拟合曲线两端点光滑过渡,如图16(c)所示。完成后做垂直于拟合曲线垂直法线截面,为便于后期三维建模,截面数可取4~6个截面,如图16(d)所示。

图16 泵体水力出口截面创建
4)泵体各断面点云数据曲线拟合
针对泵体水力提取的各断面,根据图3泵体水力设计断面,首先对杂散点进行去除,尤其是两片点云数据贴合面位置处,需要逐一去除,完成后采用软件点云拟合曲线,完成各截面点云数据曲线拟合,需要指出的是,在泵体出口直线段点云拟合圆时,需要单独进行三点拟合圆,完成后的拟合曲线保存为Vda格式,进行后期三维软件处理。

图17 泵体水力各截面拟合曲线
3.4 泵体水力模型与泵体三维模型创建
将导出的Vda格式的样条曲线文件导入到Pro/E软件中,如图17所示,结合泵体隔舌圆半径、基圆半径及各个断面曲线,采用变截面扫描泵体水力三维创建方法,完成的泵体水力模型如图18所示。需要指出的是,在泵体水力三维模型创建过程中,在隔舌圆部位需要单独采用曲面构建。对于泵体三维建模,需要借助于泵体外模点云数据四片点云合并后,如图19(a)所示,进行各断面的的提取,如图19(b)所示,完成对各断面的壁厚测量,提取泵体出口法兰尺寸,对入口法兰及泵体其他模具进行卡尺测量后,结合测量数据进行泵体三维模型逆向创建,最终泵体水力三维模型与泵体三维模型如图20所示。

图18 泵体水力各截面拟合曲线

图19 泵体水力截面拟合曲线
4 结束语

图20 泵体水力三维模型与泵体三维模型
本文通过对泵体模具结构特点进行分析,结合泵体水力设计知识,探讨并通过实例验证了采用光学三维扫描仪手段,获取泵体外模与芯盒点云数据,给出了从点云数据采集、以surface10.5为主要点云数据处理平台,进行了泵体模具测量点云逆向工程技术途径研究,最后在Pro/E三维设计软件中完成了泵体水力与泵体三维模型创建,为泵体逆向工程提供了一种新的思路。该方法在实际生产中已得到广泛应用,有效提升了设计人员的经验与效率,其应用效果得到了设计人员的充分肯定。
猜你喜欢
水泵技术(2022年3期)2022-08-26
机械工业标准化与质量(2022年7期)2022-08-12
水泵技术(2022年2期)2022-06-16
音乐天地(音乐创作版)(2022年1期)2022-04-26
煤气与热力(2021年12期)2022-01-19
中华诗词(2020年12期)2020-07-22
装备制造技术(2018年8期)2018-10-17
科技风(2018年15期)2018-05-14
铸造设备与工艺(2016年3期)2016-08-10
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
