
基于直线型内摆线尾鳍摆进装置自主推进性能实验研究
2018-10-11 01:13王淑妍王新国唐文献
江苏科技大学学报(自然科学版) 2018年4期
王淑妍,丁 进,陈 星,王新国,唐文献,张 建
(1.江苏科技大学 机械工程学院,镇江 212003)(2.江苏科技大学 江苏省船海机械装备先进制造重点实验室,镇江 212003)
近年来,受海洋生物推进机理的启发,国内外学者开发了机械式、压电式、功能材料等多种仿生水下推进装置的样机,样机性能的验证及提高直接受实验设计及实验平台的制约.因此针对开发样机的特点,开展实验设计、搭建实验平台,开展具有针对性的样机推进性能实验研究,对提高样机推进性能,揭示样机推进设计的优势和不足,不断改进样机的设计、研制性能优良的仿生水下推进装置具有重要的意义[1-2].
国内外学者从流场可视化和样机自由移动等着眼点开展了仿生推进装置的实验平台设计及搭建,并针对性地开展了活鱼观测、流场重构和样机推进性能验证等实验研究.文献[3]设计一套仿尾鳍推进系统,并对其进行了相应的水动力试验以研究了运动参数对摆动尾鳍水动力性能的影响,并将数值计算结果和水动力试验结果进行了比较,试验表明摆动尾鳍可以产生推进力和较高的推进效率;文献[4]对仿生鱼慢速自主巡游状态和C形快速起动状态进行了数值模拟,揭示了仿生鱼自主游动过程的水动力学特性;文献[5]设计一款仿鲹科机器鱼实验平台,分析一些结构设计参数对机器鱼推进性能的影响,以得到推进性能最优化的参数组合;文献[6]设计一种装有可独立运动的肋条机器尾鳍系统,以研究不同的运动模式,尾鳍产生的推力及尾流场的差异;文献[7-9]利用数字粒子回像测速(dightal partical image velocimetry,DPIV)技术对一个灵活的摆动尾鳍的尾涡进行了观测,并分析振荡频率范围0.704~1.17 Hz涡的变化距离和涡度;文献[10]研制了一套可同时实现水平方向拍动和纵向波动模式的仿生机器尾鳍,研究探讨鳍条的刚度和多个鳍条的运动模式对尾鳍三维运动推进作用的影响;文献[11]提出一种尾鳍摆动与长鳍波动组合推进的模型,并对刚性尾鳍摆动模型和柔性长鳍波动模型进行数值分析流场试验;文献[12]研究发现,在自行驱动的鱼类后部有射流形成,这些尾部涡喷的射流在对鱼类推进方面有着积极的作用;文献[13]参照鱼体尾部运动函数方程设计了“BLRF-I” 系列仿鲹科机器鱼,对机器鱼的巡游速度与最小转弯半径进行实验分析,论证了机器鱼关节数目对机器鱼游动性能的影响,提出鱼关节数目和巡游速度的关系方程;文献[14]构建仿鲤鱼机器鱼平台,并通过系泊测力实验研究常见的圆形、叉形和新月形尾鳍的推进性能,同时比较刚性、弹性两种材质对尾鳍推进性能的影响;文献[15]基于一个简单的模型,探究具有一定弹性的尾鳍推进系统的推力最大化的动力学条件,当驱动轴的正弦转动与弹性尾鳍的正弦挠曲存在相位差,且接近π/2时,推力最大.
直线型内摆线推进装置是由直线内摆线行星轮系和连杆机构复合形成可动三角形,其输出的尾柄、尾鳍运动分别为正弦和类正弦函数,其运动无急回,且通过改变V型行星架夹角可灵活改变尾鳍尾柄运动相位差,同时还可以与减速装置进行一体化设计,适合应用在大推进力的场合.文中在自由移动摆动实验台的基础上,结合该推进系统和完整仿鱼样机的区别及实验验证需求,对实验平台进行改进,提高了实验平台对推进装置左右晃动的容错性,对该推进装置开展性能验证实验,探讨该推进装置在自主推进过程中尾鳍运动频率、横移幅度、摆动幅度、尾鳍种类等参数对该推进装置推进性能的影响.
1 直线型内摆线推进装置的实验设计及实验装置
1.1 直线型内摆线推进装置
直线型内摆线推进装置以行星轮系和连杆机构组成的复合机构来模拟鰺科鱼类尾部双关节尾摆运动,具体来说是直线型内摆线行星轮系实现尾柄的直线往复移动,连杆机构在实现尾鳍摆动的基础上,和直线型内摆线行星轮系构成动活动三角形实现尾柄和尾鳍运动的复合,其运动模型如图1.

图1 直线型内摆线推进系统的双关节运动模型Fig.1 Two-joint kinematic model of linear hypocycloid propulsion system
尾柄A的直线往复位移SA、尾鳍绕A点的摆动角位移θ的控制函数如下:
(1)
式中:r为太阳轮的半径,ω为行星轮的角速度.
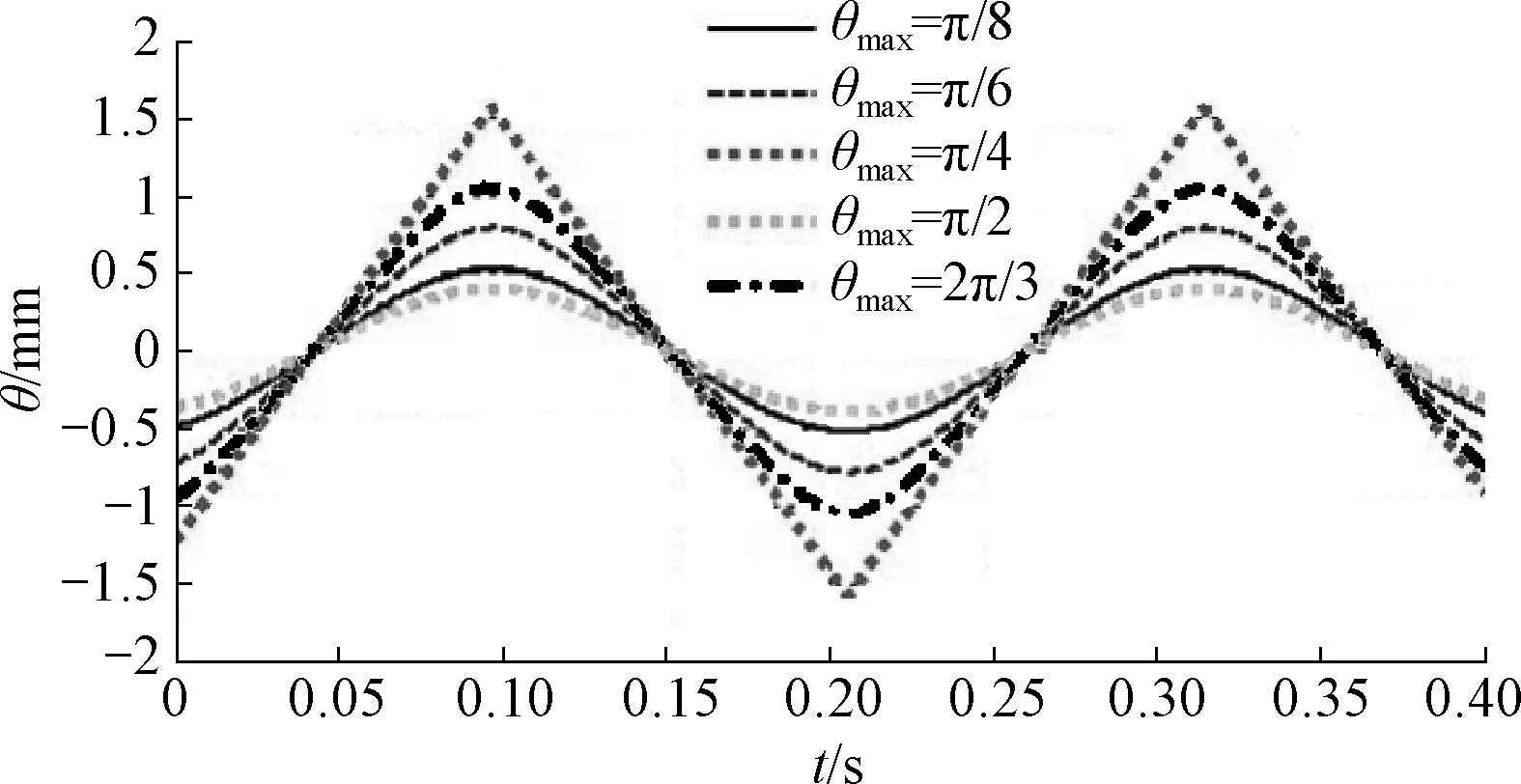
图2 不同θmax条件下尾鳍摆角的变化趋势Fig.2 Variation trend of θ under different θmax
该直线型内摆线推进装置的三维造型和原理样机如图3(a,b),图3(c)为传动系统结构,具有运动无急回、相位差可调、可靠性高等优点,同时满足大功率推进的设计要求,可以与减速装置进行一体化设计.

图3 尾摆式推进系统传动系统Fig.3 Transmission system of caudal-fin propulsion system
2.2 推进效率的实验设计
为了对尾鳍的推进效率进行更加深入的研究,碍于现有的仪器并不能直接测量,采用基于推进力——扭矩的推进效率估算方法来求解推进效率.通过对推进系统中尾鳍摆动时的受力分析,测量目标数据推进力F和扭矩ττ,以间接的数值计算从而达到实验研究目的.
尾鳍波动推进产生沿推进器前进方向的推进力,进而使推进器前进.推进器推进过程中尾鳍的输出功率pout为一个周期的功率且输出功率呈周期性变化,pin为尾鳍输入功率,则推进器前进时的推进效率η为:
(2)
式中:F为沿推进器前进方向的推进力,即为实验平台拉压力计的读数;v为推进器自由移动摆动条件下的推进速度,即为实验平台中滑块的移动速度.通过提取滑块在圆形导轨上的关键点位置与时间形成S∝t的函数图像从而得出近似的推进速度v.
通过测量推进器在推进过程中所受到的转矩来估算尾鳍波动运动所消耗的功率,即输入功率.流体对沿x轴上尾鳍各处的反作用力在O点处的力矩τt与尾鳍摆动的角频率ω*的周期均值的乘积,即为鱼体波动运动的输入功率.如图4,尾鳍推进系统尾柄C做不规则往复运动,则此时有:
(2)
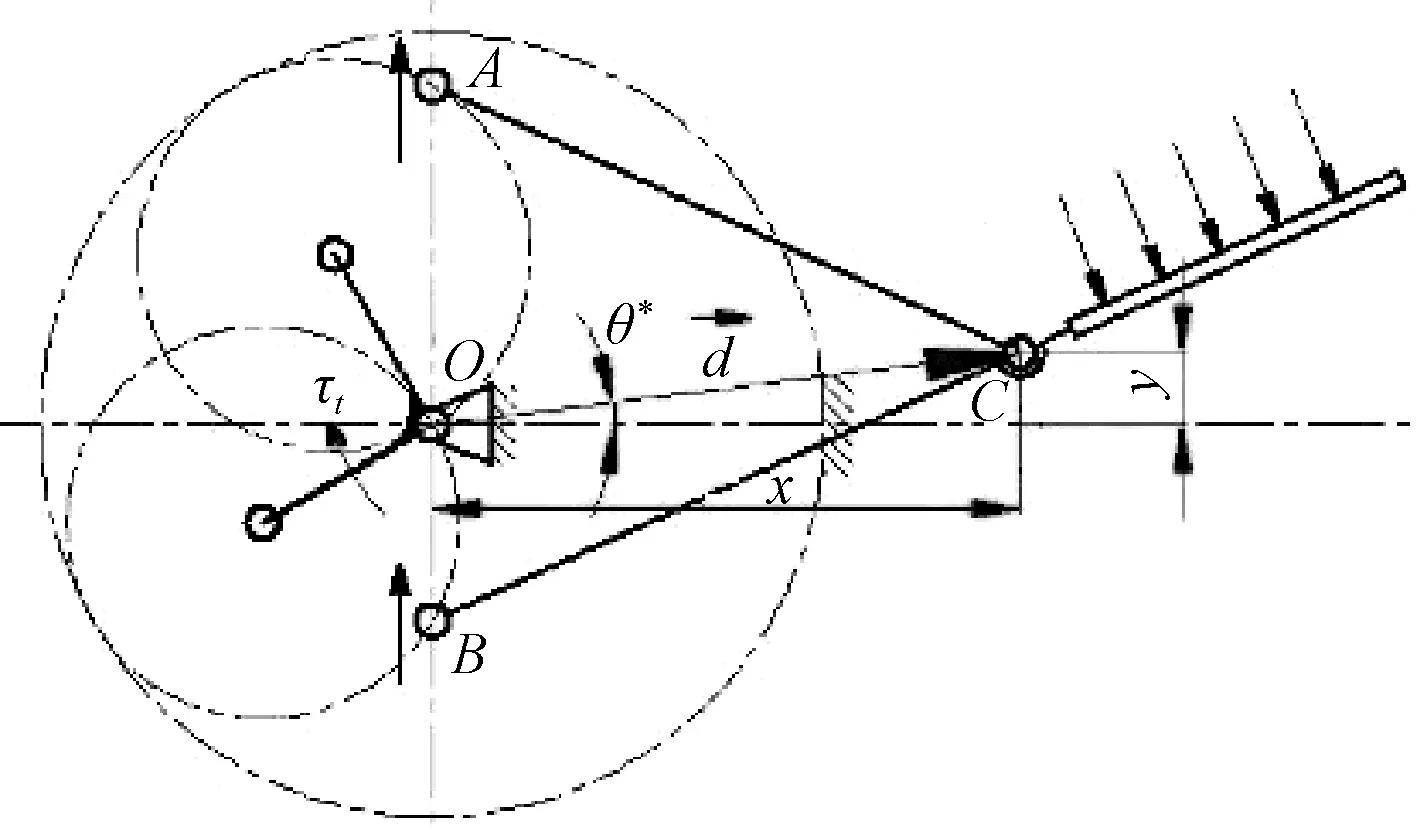
图4 推进系统中尾鳍摆动时的受力示意Fig.4 Stress of oscillating caudal fin in propulsion system
3 实验装置和实验方法
3.1 自由移动摆动实验平台
基于来流和鱼体相对平衡的思想,现有的实验平台主要分为两类:固定式测量方法(图5(a))和自由推进测量方法(图5(b)).
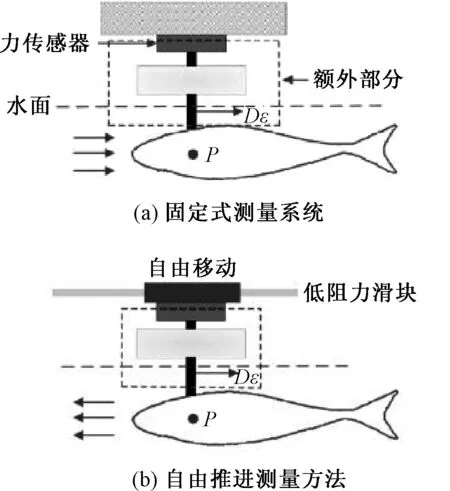
图5 仿鱼推进测量方法Fig.5 Measurement methods of imitating fish propulsion
固定式测量法是将机器鱼固定在支柱上,支柱上部与滑块固定连接,保证机器鱼模型垂直摆放;或者支柱直接被安置在循环水槽中,省去滑块,在特定来流速度下,机器鱼的外部受力均可以通过传感器进行测量,但这种固定式测量不能迎合自主推进的理念.自由推进测量是通过机器鱼摆动其尾鳍形成推进力用以克服滑块滑动阻力和机器鱼的流体阻力,直接测量鱼体推进过程中的推进力和扭矩,这种方法大体上迎合了自主推进的理念.
由于直线型内摆线推进装置只有尾鳍推进部分,难以避免鱼艏摆动,为了提高实验的容错性,此处自由移动摆动实验平台是在自由推进测量方法的基础上进行部分改装.实验台采用圆形导轨并增大支撑距离,使尾摆式推进系统在一个大弧度的曲面上做平面运动,如图6.为了使机器鱼最大程度的在水箱里模拟鱼在水下的游动状态,考虑到尾鳍在自由摆动时需要一定的空间,所以测量系统在垂直面内的自由幅度为20°.在此条件下,保证其下摆跳动误差控制在4 mm以内,可以近似地认为尾鳍在平面内摆动.
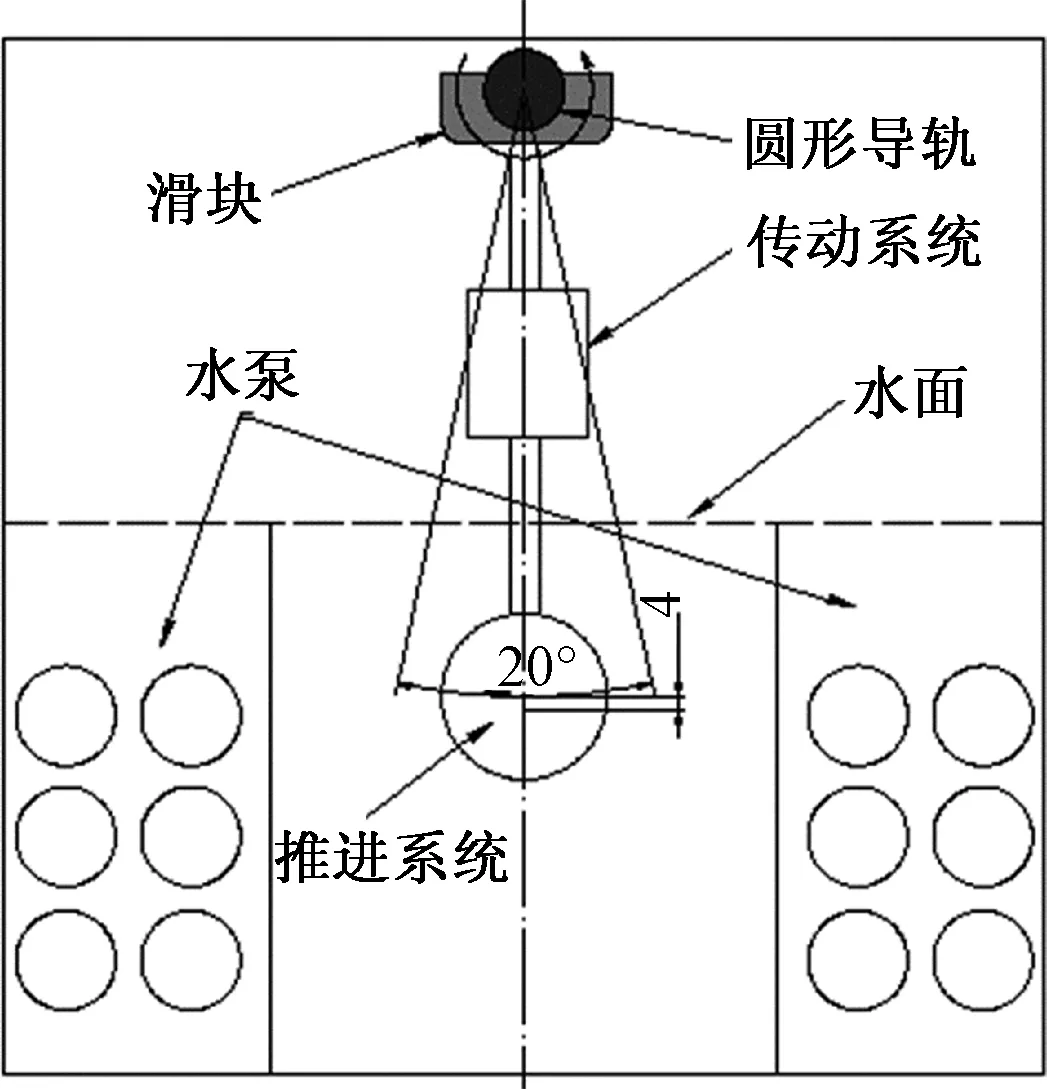
图6 实验平台测量方法Fig.6 Measuring method of experimental platform
直线型内摆线推进装置的测量原理及实验装置如图7,尾摆式推进系统固定在拖拽系统的下部.在机器鱼游动过程中,以尾摆式推进系统的水动力参数推进力和扭矩作为测量数据,扭矩通过扭矩传感器(HX-917)直接测量,推进力通过拉压力传感器(LYJ-1)间接地测量,两台设备的工作频率均为15次/s.沿鱼体轴线的实时推进力为:
(4)
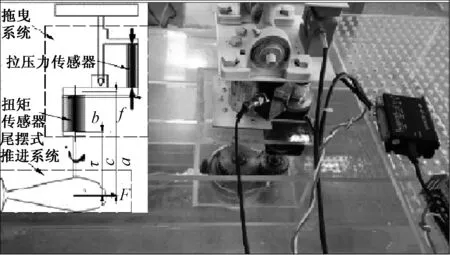
图7 传感器测量原理及设备安装Fig.7 Measuring principle of sensors and installation of equipment
水箱中的来流速度通过排列于两边的造浪泵调节,并通过前部均匀密布网格使来流均匀,如图8.在造浪泵的辅助下主通道中实现节点流速调节,关键流速0、0.1、0.15、0.2、0.25、0.3 m/s均能通过控制后实现满足实验需求.
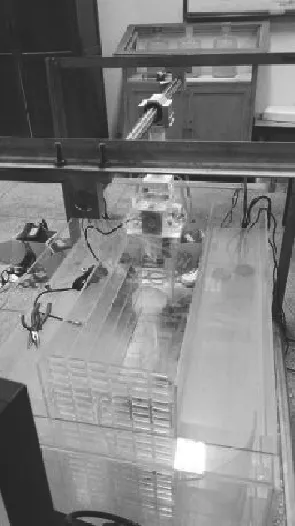
图8 自由移动摆动实验平台Fig.8 Freely advancing & swinging experimental platform
3.2 实验条件
尾鳍运动学主要参数有:摆动频率f,尾鳍摆幅A,尾柄横向移动幅度H,尾鳍-尾柄相位差Δφ,斯德鲁哈尔数St等;从已有的实验论证得出,实验开始前设置尾摆式推进系统的相位差Δφ=90°.尾鳍的基本结构尺寸以金枪鱼尾鳍、海豚尾鳍和白鲸尾鳍为实验样本,如图9.
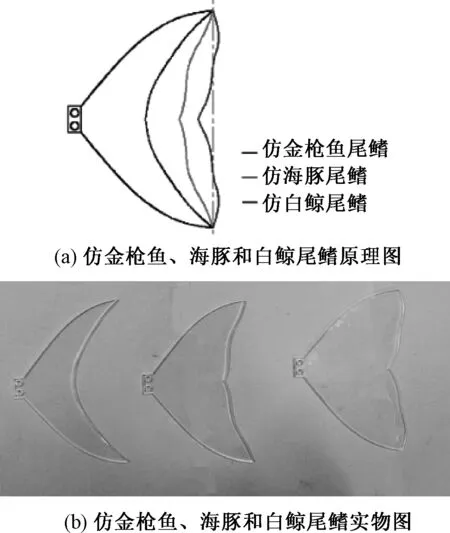
图9 简化后的金枪鱼、海豚和白鲸尾鳍Fig.9 Simplified caudal fin of tuna, dolphin and whale
尾鳍下缘尖部距离主流道底部大约15~20 cm.主流道的尺寸为1 000 mm×310 mm×430 mm,实验水温15±5 ℃.水的运动粘度v为1.00×10-6m2/s.雷诺数Re=DL·U/v≈1.97×105.对于103≤Re≤107的流体,其粘性阻力相对于压差阻力及附加质量均可忽略.图10为尾摆式推进系统水槽推进实验快照.

图10 尾摆式推进系统水槽推进实验Fig.10 Flume experiment of caudal fin propulsion system
4 实验结果与分析
4.1 尾鳍摆动频率对尾摆式推进系统推进性能的影响
以仿金枪鱼尾鳍作为分析对象.设定尾鳍运动的定量参数:H=30 mm、A=30°、v0=0.尾鳍摆动频率f为变量,其实验值为0.1~1.2 Hz均匀递增.
如图11,频率和平均速度之间基本呈现线性关系,由图可得,当尾鳍摆动频率为0.1 Hz时,尾摆式推进系统仍停留在初始位置,这是因为当尾鳍摆动频率过小时尾鳍波动运动所产生的推进效果并未能突破测量系统的静摩擦力;而当摆动频率提升到0.2 Hz时,其推进速度突变到0.042 m/s,突变的斜率明显高于之后的增速.从0.3 Hz开始,其增速基本保持稳定,表明形成了稳定的尾涡,进而使尾摆式推进系统的平均推进速度得到了较大的增幅.由于实验平台的限制,测定的最高频率为1.2 Hz.
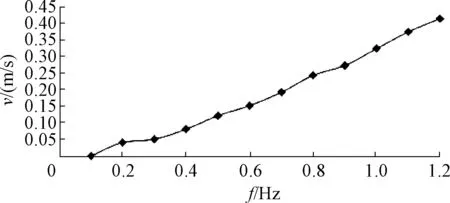
图11 速度-频率变化曲线Fig.11 Curve of speed to frequency
从图12看出,在0~0.8 Hz范围内,随着尾摆式推进系统频率的变化,平均推进效率呈现增大趋势,在运动频率达到0.8 Hz时,其平均推进效率达到峰值0.71.此后,伴随着运动频率的增加,尾摆式推进系统的平均推进效率又呈现逐渐减小趋势.
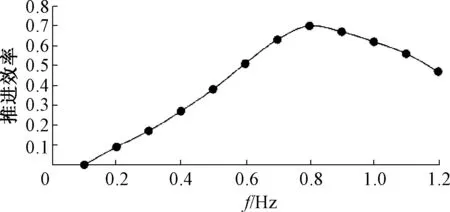
图12 推进效率-频率变化曲线Fig.12 Curve of propulsive efficiency to frequency
通过对推进效率随频率的曲线分析,可以初步得出结论,当频率f=0.8 Hz时,尾摆式推进系统的推进性能最好.
4.2 尾柄横向移动幅度对尾摆式推进系统推进性能的影响
以仿金枪鱼尾鳍作为分析对象.设定尾鳍运动参数中的定量:A=30°、f=0.8 Hz、v0=0.尾鳍横向移动幅度H为变量,其实验值为30~50 mm均匀递增.实验中选用3个不同的摆动频率以增加数据样本.
图13为在不同横移幅度情况下,尾摆式推进系统平均推进速度的比较.当运动频率为0.5 Hz时,尾摆式推进系统在横移幅度为40 mm时,推进速度达到峰值;当运动频率达到1 Hz时,其在横移幅度为45 mm左右,推进速度达到峰值;频率更大,即1.5 Hz时,检测范围内,尾摆式推进系统甚至没有峰值出现.这说明在尾鳍形状和展弦比确定的情况下,相对于每一个运动频率,会有一个最优横移幅度,该值对应最大推进速度.
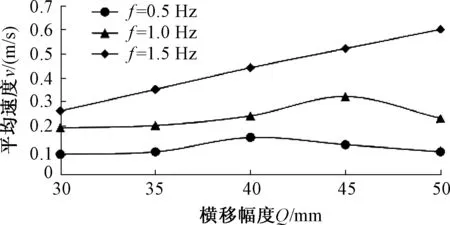
图13 平均推进速度-横移幅度变化曲线Fig.13 Curves of average velocity to transverse amplitude
图14为不同横移幅度情况下,平均推进效率的比较.在固定频率条件下,系统的平均推进效率均随着尾鳍横移幅度的增加而降低.当f=0.5 Hz时,增加4次尾鳍的横移幅度,其降低幅度分别为19%、34%、52%、58%;当f=1 Hz时,其降低幅度分别为22%、44%、61%、71%;当f=1.5 Hz时,其降低幅度分别为31%、50%、68%、82%.这表明随着尾鳍的横移幅度不断增大,其推进效率最终会达到零点,甚至出现负值,从而失去推进能力.从实验结果来看,尾鳍横移幅度为30 mm左右时,尾摆式推进系统能获得较高的推进效率.
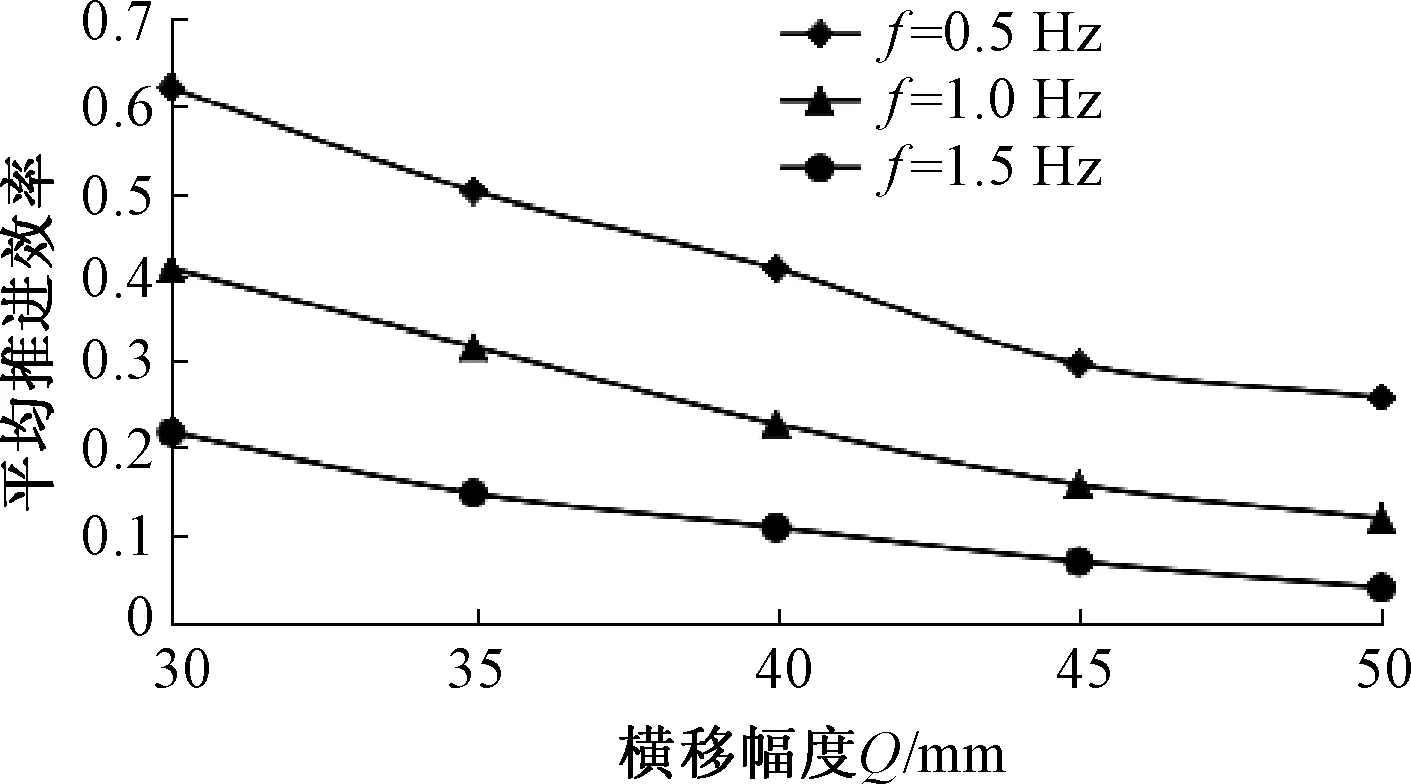
图14 平均推进效率-横移幅度变化曲线Fig.14 Curves of average propulsive efficiency to transverse amplitude
综上所述,在定频率条件下,尾摆式推进系统的推进速度随着横移幅度的增加而增加,并最终达到峰值,但平均推进效率均随着横移幅度的增加而降低,30 mm的横移幅度是其推进效率最好.
4.3 尾鳍摆动幅度对尾摆式推进系统推进性能的影响
以仿金枪鱼尾鳍作为分析对象.设定尾鳍运动参数中的定量:H=30 mm、f=0.8 Hz、v0=0.尾鳍摆幅A为变量,其实验值为20°~40°均匀递增.
从图15中的曲线可以清晰地看到,推进效率起初呈现上升的趋势,在摆动幅度达到30°时,达到测量范围内的峰值.此后,随着摆动幅度的进一步增大呈现下降的趋势.初步得出结论,当尾鳍的摆动幅度在30°时,尾摆式推进系统的推进效率处于峰值.
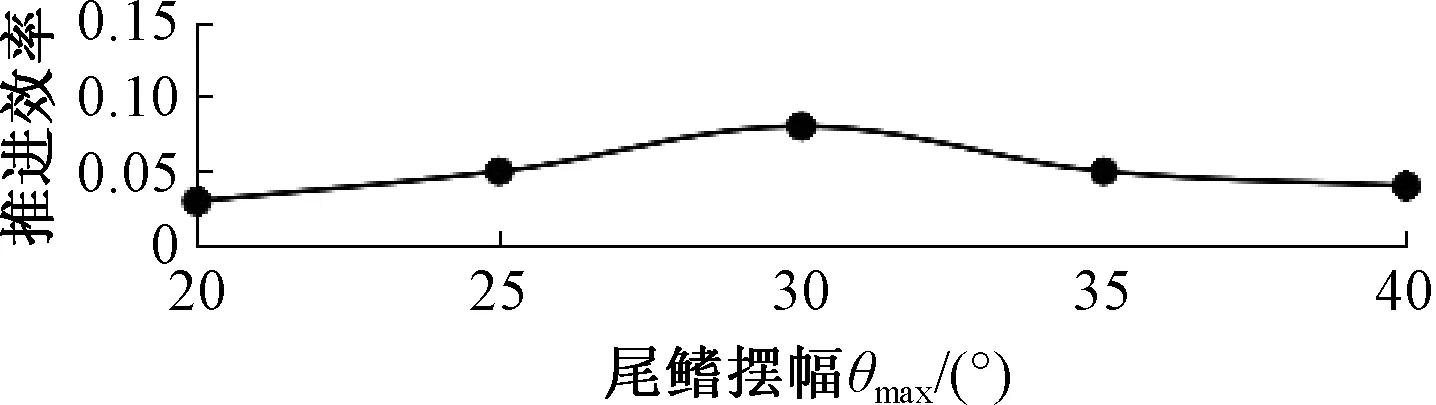
图15 推进效率-摆幅的影响Fig.15 Curves of propulsive efficiency to oscillating amplitude of caudal fin
4.4 尾鳍类型对尾摆式推进系统推进性能的影响
以仿金枪鱼尾鳍、仿海豚尾鳍及仿白鲸尾鳍作为分析对象.设定尾鳍运动参数中的定量:H=30 mm、A=30°、f=0.8 Hz、v0=0.通过对图16中曲线进行分析:
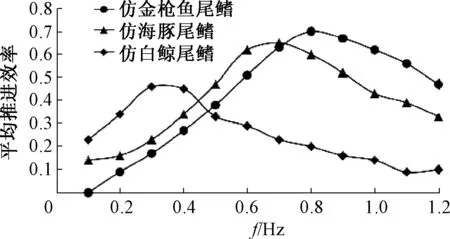
图16 平均推进效率-尾鳍形状变化曲线Fig.16 Curves of average propulsive efficiency to shapes of caudal fin
3种仿生尾鳍均出现了峰值,所不同的是仿白鲸尾鳍最先出现峰值在0.3 Hz左右,仿金枪鱼尾鳍的峰值为最大在0.8 Hz左右;其次,可以将频率范围简单地分为3个阶段,低频阶段:0~0.45 Hz,中频阶段:0.45~0.75 Hz,高频阶段:0.75 Hz~∞,在低频阶段,仿白鲸尾鳍的推进效率要明显高于仿金枪鱼尾鳍和仿海豚尾鳍,而在中频阶段,仿海豚尾鳍具有优势,在高频阶段,仿金枪鱼尾鳍的推进效率最高.
综上所述,不同形状的尾鳍所具备的最大推进效率各不相同,推进效率最高的是金枪鱼尾鳍.低频条件下,白鲸类尾鳍成为不追求高速的大型水下动物的选择.中频条件下,仿海豚尾鳍具有最高的推进效率,水下中型鱼类大都采用仿海豚尾鳍.高频条件下,仿金枪鱼尾鳍具有最高的综合性能,水下小型鱼类或追求高速度的中型鱼类均采用金枪鱼类尾鳍.
5 结论
以直线型内摆线尾摆式推进系统为研究对象,以改进的自由移动摆动实验平台为研究工具,以机器鱼尾鳍的推进力和扭矩为测量目标,研究尾鳍运动频率、横移幅度、摆动幅度、尾鳍种类对尾鳍自主推进性能的影响,进行大量的尾摆式推进系统的实验,得到如下结论:
(1) 尾摆式推进系统的平均速度随着尾鳍运动频率增大而提高,且当尾鳍运动频率在0.8 Hz时,尾摆式推进系统的推进效率最高,此时的推进性能最好.
(2) 特定的尾鳍相对于每一个运动频率,会有一个最优横移幅度,得到最大的推进速度,当尾鳍的横移幅度在30 mm时,尾摆式推进系统的推进效率最高,此时的推进性能最好.
(3) 尾鳍的摆动幅度在30°时,尾摆式推进系统的推进效率最高此时的推进性能最好.
(4) 不同形状的尾鳍在不同频段下所具备的最大推进效率各不相同.低频时,白鲸类尾鳍大型水下动物的最优的选择;中频段,仿海豚尾鳍具有最高的推进效率,水下中型鱼类大都采用仿海豚尾鳍;鯵科尾鳍在高频状态下推进效果要优于白鲸尾鳍和海豚尾鳍.
猜你喜欢
轻工机械(2022年5期)2022-10-31
汽车实用技术(2021年23期)2022-01-05
防爆电机(2021年1期)2021-03-29
南方农业学报(2020年7期)2020-11-09
科学技术与工程(2020年20期)2020-08-03
东方法学(2017年4期)2017-07-13
制造技术与机床(2017年3期)2017-06-23
中北大学学报(自然科学版)(2016年6期)2016-12-23
空气动力学学报(2014年5期)2014-04-30
游泳(2014年3期)2014-03-27
