
基于PLC 智能铺设地砖机的机械手设计
2018-11-01 03:50温杰史春笑毛厚昌谭泽德欧健威洪越
发明与创新 2018年25期
温杰 史春笑 毛厚昌 谭泽德 欧健威 洪越
华南农业大学珠江学院信息工程学院 广东 广州 510900
一、背景分析
铺设地砖是建筑行业中比较常见的一道工序。目前,地砖都是由工人手工铺设而成,其工作效率低、劳动强度大。随着铺设时间的增加,工人很容易出现工作能力减弱、错误率增加的状况,这直接影响了地砖铺设的质量以及铺设的平整度。此外,长时间弯腰作业不利于工人的身体健康,很容易出现腰椎方面的疾病。因此,迫切需要研制出利用机械手进行自动铺设地砖的机器人,采用自动化设备代替人力铺设地砖,这能从根本上降低工人的劳动强度,提高铺设地砖的质量和效率,也能解决建筑行业人手不足的问题。
二、智能铺设地砖机机械手硬件设计
1.地砖机总体方案设计
本系统的总体设计框图如图1所示。

图1 总体设计框图
2.机械手外部支架设计
本设计选用规格为宽38mm、厚25mm的304不锈钢管焊接成系统支架,外加轮子、轴承、轴芯、齿轮、链条、步进电机、推杆电机等组成系统的外框架。系统支架平面图如图2所示,其中a为支架底面,b为支架顶面。

图2 支架平面设计图
3.机械手设计
本设计是通过控制面板上的按钮、触摸屏以及各种限位开关来控制步进驱动器和相应的步进电机运行,从而实现机械手所需功能。
滚珠丝杠和直线导轨构成机械手移动的主体支架及轨道,机械手被设计成三轴的形式,即X、Y、Z轴,如图3所示。滚珠丝杠上的螺母及螺帽和Z轴的直线导轨上的滑块或X轴直线导轨上的滑块或Y轴直线导轨上的滑块被一片铝片连接起来形成一个承载平台,三轴机械手的动力来源是由分别装在三个轴的端部的步进电机来完成,如图4所示。

图3 机械手结构

图4 机械手平台结构
限位开关决定机械设备运动的极限位置。使用接触式限位开关分别安装在机械手三轴的两端,并在与其相对的运动的极限位置处安装挡块。当机械设备上行程开关的机械触头碰到挡块时,就会切断控制电路,机械设备会根据控制器的命令停止运行或者改变运行方向。
4.机械手控制系统设计
本系统以三菱FX3UPLC为核心控制器,可实现对信号采集、处理及输出等一系列控制,实现机械臂移动定位,机械手吸取地砖等功能。
三、机械自动控制程序设计
1.机械手控制系统I/O分配
本设计的输入输出接口分配如表1所示。

序号1 2 3 4 5 6 7输入口X000 X001 X002 X003 X004 X005 X006端口说明起动暂停停止Y轴原位X轴原位X轴左限位X轴右限位输出口Y000 Y001 Y002 Y003 Y004 Y005 Y006端口说明脉冲信号方向信号脱机信号X轴电机Y轴电机Z轴电机控制振动电机

表1 I/O口分配
2.机械手自动模式程序
状态转移跳转到S20状态步,PLC输出一系列的脉冲信号,Z轴电机得电,机械臂下降,直到碰到取料限位,取料限位开关闭合,对Y012(电磁阀)置1,真空发生器产生吸力,吸住地砖,等待5s延时。图5为机械臂下降取料程序。

图5 机械臂下降取料程序
延时时间到,状态转移到下一步,输出一系列脉冲信号,Z轴电机得电,机械臂上升,直到碰到Z轴上限位,Z轴电机断电。机械臂上升程序如图6所示。
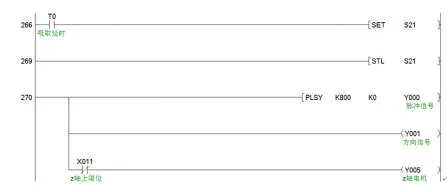
图6 机械臂上升程序
上升结束状态转移到下一步,输出81400个脉冲信号,Y轴电机得电,机械臂前移81.4cm;当81 400个脉冲发送完毕,M8029(当DSW指令等操作完成时)辅助继电器触头闭合,状态转移下一步,输出80800个脉冲信号,X轴电机得电,机械臂右移80.8cm;当80800个脉冲发送完毕,M8029辅助继电器触头闭合。如图7所示。

图7 Y轴前移81.4cm后X轴右移80.8cm
右移结束状态转移到下一步,输出9200个脉冲信号,Z轴电机得电,机械臂下降,M8029辅助继电器触头闭合,振动电机启动,地砖振动,等待8s延时,延时时间到,振动电机停止,复位空气阀,松开地砖,等待6s延时。图8为Z轴下降并振动程序。
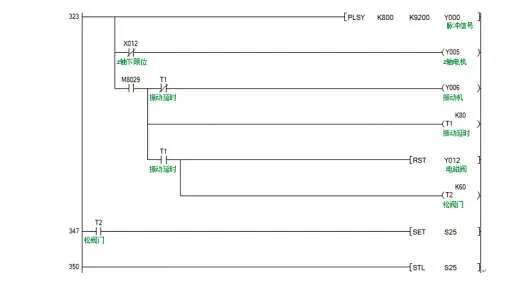
图8 Z轴下降并振动程序
延时时间到,状态转移到下一步,输出一系列脉冲信号、方向信号,Z轴电机得电,机械臂上升,直到碰到Z轴上限位限位开关,Z轴电机断电;状态转移到下一步,输出一系列脉冲信号、方向信号,X轴电机得电,机械臂左移,直到碰到X轴原位限位开关,X轴电机断电;状态转移到下一步,输出一系列脉冲信号,Y轴电机得电,机械臂下移,直到碰到Y轴原位限位开关,Y轴电机断电,机械臂已经回到原位,表示第一块地砖已经铺设完成。等待2s延时,延时时间到,开始下一个周期的循环。图9为机械臂回取料区程序。
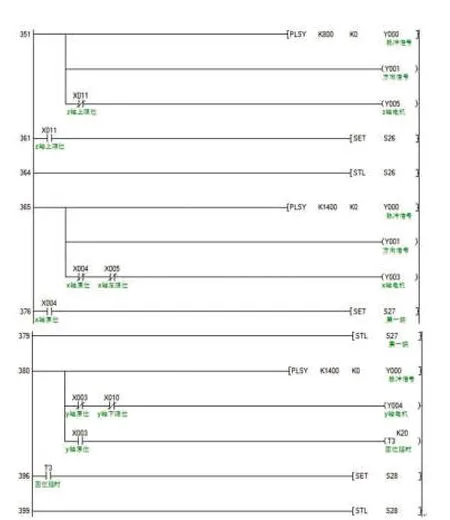
图9 机械臂回取料区程序
四、结语
本课题通过对系统硬件设计、软件编程、仿真调试三方面的结合,设计达到了预期的效果。但是由于技术及条件限制等多方面原因,设计出来的机器人尚不完美,还存在很多不足。例如支架尺寸与支架移动机构的设计,因缺少机械方面的知识,设计出的机器人还不能很好地在建筑环境下工作,因选材不够专业,导致现在设计出来的机器人比较笨重,不方便搬运。不过,该机器人可以进行二次开发,增加所需的功能,例如自动下水泥浆、自动磨平铺设区域下的水泥浆等。
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
自动化仪表(2020年10期)2020-11-13
哈尔滨轴承(2020年4期)2020-03-17
电子制作(2019年14期)2019-08-20
制造技术与机床(2018年11期)2018-11-23
猪业科学(2018年4期)2018-05-19
新能源科技(2018年1期)2018-02-17
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
