
遥操作时延问题控制方法分析
2018-11-07 11:37孟蒙宁祎
电脑知识与技术 2018年21期
孟蒙 宁祎

摘要:目前,虽然遥操作已经被广泛应用于许多领域。但是由于受到当今计算机处理能力,科学技术发展水平等的限制,遥操作中仍然面临着大时延问题。因此该文主要针对解决大时延问题的方法展开讨论。总结传统的经典控制方法的同时,引入模糊PD控制方法并进行介绍。
关键词:遥操作;大时延技术;模糊PD控制
中图法分类号:TP242 文献标识码:A 文章编号:1009-3044(2018)21-0009-04
Abstract: At present, teleoperation has been widely used in many fields. However, due to the limitations of today's computer processing capabilities, scientific and technological development levels, etc., remote operation still faces large delays. Therefore, this paper focuses on the solution to the problem of large delays. At the same time of summarizing the traditional classical control method, the fuzzy PD control method is introduced and introduced.
Key words: remote operation; large delay technique; fuzzy PD control
1 背景
對遥操作系统的研究最早出现于20世纪的40年代,随着科技的不断进步,对遥操作有了进一步的研究。目前,在国内遥操作已经被广泛应用于医学、太空、深海等领域中。遥操作中的时延主要产生于通讯过程和计算机对数据的处理过程中[1]。因此由于受到当今计算机处理能力,科学技术发展水平等的限制,机器人遥操作中仍然存在大时延问题。从而影响了操作系统的稳定性、透明性、临场感等性能,虽然前人对于解决大时延所带来的问题方面提出了不少的经典控制方法,但是大部分方法只是对固定时延的情况下有效[2]。因此为了使系统在随机时延的情况下更加的稳定可以引用模糊神经网络来整定PD控制器参数[3]。
2 遥操作系统简介
主从方式的遥控系统是现已有操纵机器人的典型形式,简称为主从系统。它主要由主端、从端、通讯通道、环境等组成[4]。图1表示了主从操作系统的概念图。操纵型机器人可以分为机械式主从机械手和伺服式机械手这两种主要类型。机械式主从机械手的特点简单,它与伺服型主从机械手相比没有电路,主从两端通过机械方式相结合,主臂能直接地感受到来自从端的力。伺服式机械手,在位置上从臂相对于主臂是分离的,且能够自由移动使作业的范围大大扩展[5]。
下角标m代表了主机器人s代表了从机器人;[ fh]操作者对机器人施加的力,[fe]为从机器人对环境施加的力;[ Mqs(qs)qs..]和[Mqm(qm)qm..]是转动惯量矩阵表示;[ qm],[qs]表示关节角的位置;[ Cqm(qm,qm.)qm.],[ Cqs(qs,qs.)qs.]分别代表了离心力和哥氏力;[ Gqm(qm)]和[Gqs(qs)]表示了重力部分;含有[τ]的项代表了控制力矩的输入项;[J]是雅格比矩阵。操作者对主机器人施加力之后,把它的位置指令经过通信传输给从机器人,从机器人完成相应的任务同时把它与环境之间的作用力反馈给操作者,有了这种力反馈可使操作者施加正确的力进行准确的控制[6-7]。
3 机器人遥操作控制方法
控制方法的研究是遥操作技术研究的核心内容,当今遥操作控制方法的研究已经取得了辉煌的成绩,并推动了我国航天事业迅速发展[8]。
3.1 无源性的双边控制方法
在典型的遥操作系统结构中操作者和环境是无源的,如果能设计一种控制器使得带时延的通信传输模块无源则就可以保证整个系统是无源的[9]。 Anderson法和波变量法是基于无源双边控制的典型代表。
3.1.1 Anderson控制方法
1989年,Anderson提出了一种无源性控制算法,这种方法是改变了时延传输模块两端传输的物理量,使得传输部分和无损传输线等效[10]。没有施加效果前的传输表达式:
3.1.2 波变量法
Niemeyer和Slotine在1991年提出了波变量法[12]。这种方法是从能量的角度出发,把Anderson法中在主从端传输的速度和力用波变量来代替,保证系统的无源稳定的性能,波变换表达式如下[13],选择力作为输入变量时波变换的示意图如图2所示。
b是特征波阻抗也是调节系统透明性和稳定性的唯一参数。无源性的控制方法有过于保守的稳定性,稳定性和透明性相互矛盾,因此系统透明性会有所下降[14]。
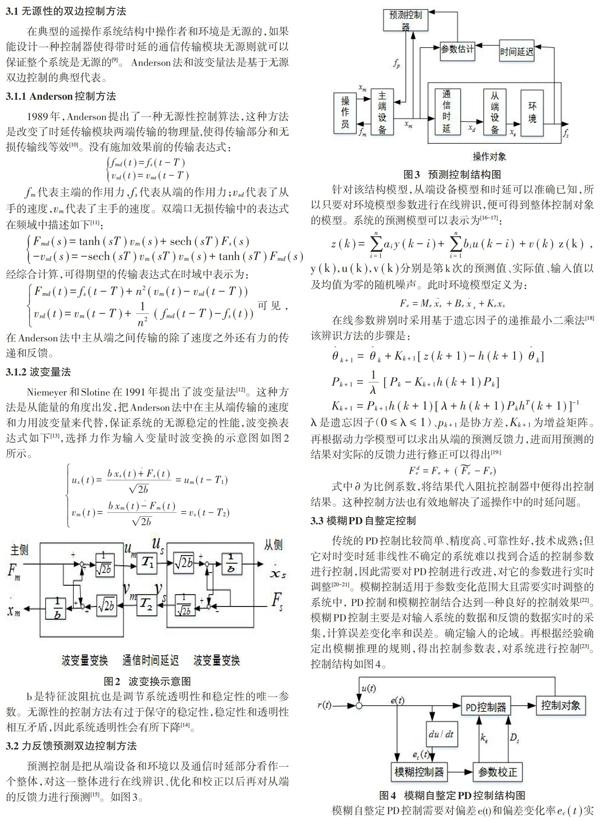
3.2 力反馈预测双边控制方法
预测控制是把从端设备和环境以及通信时延部分看作一个整体,对这一整体进行在线辨识、优化和校正以后再对从端的反馈力进行预测[15]。如图3。
3.3 模糊PD自整定控制
传统的PD控制比较简单、精度高、可靠性好,技术成熟;但它对时变时延非线性不确定的系统难以找到合适的控制参数进行控制,因此需要对PD控制进行改进,对它的参数进行实时调整[20-21]。模糊控制适用于参数变化范围大且需要实时调整的系统中, PD控制和模糊控制结合达到一种良好的控制效果[22]。模糊PD控制主要是对输入系统的数据和反馈的数据实时的采集,计算误差变化率和误差。确定输入的论域。再根据经验确定出模糊推理的规则,得出控制参数表,对系统进行控制[23]。控制结构如图4。
3.4 其他的一些经典控制方法
经过几十年的研究,前人总结出了多种控制方法来解决遥操作中的时延问题。如基于事件的控制方法、基于[H∞]理论的控制方法、自适应控制方法等[26-29]。在基于事件的控制方法中,用事件来代替时间作为新的参考变量,满足一定条件的情况下系统的稳定性就可以保证了。基于[H∞]理论的控制方法是把大时延作为干扰信号来处理[30-31],把时延的影响降低到要求的范围内,因为该控制理论可以把所有性质的有界扰动的影响降到理想的范围内,这种方法的缺点在于对于任意时延的情况难处理[32-33]。自适应控制方法具有学习的特性,它不需要大量的参数和先验信息,在处理随机时延方面有着突出的优势,它能够随着环境和动态过程的变化来实时调整自己的特性。它的研究对象通常是有一定的不确定性,是通过对不确定的参数进行在线估计,再对估计值不断的修正,从而降低不确定性对系统的影响。它的不足之处在于对没有模型的动力学问题不能有效地处理[34]。
4 总结与展望
该文主要针对机器人遥操作中存在大时延问题总结了一些经典的控制方法,并对无源双边控制方法、力反馈预测双边控制方法进行了详细的介绍,同时又引入了模糊控制,让它和传统的PD控制相结合形成的模糊PD控制改善了遥操作控制系统运行的稳定性[37]。模糊控制在系统的稳定性方面有所改善,稳定性和透明性往往是相互矛盾的,因此模糊PD控制使操作系统的透明性有所下降,对传统的经典控制方法无源双边控制方法研究比较深入,但是对稳定性的要求过于保守,同样会使系统的透明性受到一定程度的影响[35]。因此为解决遥操作中的大时延问题还需要进一步的改进相应的控制方法,与当今的科学技术相结合研究一些新的控制策略来提高操作系统的性能指标。由于个人时间精力和能力的有限,在该文中只是详细介绍了无源双边控制、力反馈预测控制、模糊PD控制,其他的一些控制方法简略的介绍。个人认为操作系统中对大时延问题的解决,可以从以下的几个方面进行进一步讨论研究。
1)在当今已有的稳定性成果的基础,结合深度学习来设计出新控制算法,让系统在得到满意的稳定性的同时拥有可观的透明性,使操作系统的其他性能也能得到改善。
2)文献[36]中提到建立有效的环境接触动力学的模型,对已有的模型进行改进建立一种便于参数的辨识的模型又能精确描述遥操作机器人和环境接触的动力学特性。这样也有利于提高操作系统的控制能力。
3)当今,网络发展越来越迅速,网络遥操作的控制方法也得到了广泛的应用,在网络的传输中也会产生一定的时延,大部分的控制方法只是改善了系统性能的某一方面,因此我们可以把控制和传输协议的改善相结合,从而使遥操作系统达到一个最佳的效果。
参考文献:
[1] 王永, 谢圆, 周建亮. 空间机器人大时延遥操作技术研究综述[J]. 宇航学报, 2010, 31(2): 299-306.
[2] 应旻. 基于力反馈预测的遥操作双边控制技术研究[D]. 北京: 北京邮电大学, 2014.
[3] 徐效農. 空间机器人地面遥操作的关键技术研究[D]. 南京: 东南大学, 2017.
[4] 刘霞. 遥操作系统的控制结构与控制方法综述[J]. 兵工自动化, 2013(8): 57-63.
[5] 郭祥艳, 刘传凯, 王晓雪. 加拿大移动服务系统地面遥操作模式综述[J]. 深空探测学报, 2018(1).
[6] 张涛, 陈章, 王学谦, 等. 空间机器人遥操作关键技术综述与展望[J]. 空间控制技术与应用, 2014, 40(6): 1-9.
[7] 张晓凤. 基于神经网络PID控制方法的研究[D]. 沈阳: 东北大学, 2013.
[8] 唐国金, 周剑勇, 张波, 等. 遥操作交会对接技术综述[J]. 载人航天, 2011, 17(2): 38-44.
[9] 于振中. 移动操作机器人及其共享控制的力反馈遥操作研究[D]. 哈尔滨: 哈尔滨工业大学, 2010.
[10] 李玉玲. 时延双边遥操作机器人系统控制方法研究[D]. 北京: 北京科技大学, 2016.
[11] 高欣, 赵启飞, 吴立凯, 等. 基于主端力缓冲的波变量4通道双边控制方法研究[J]. 北京理工大学学报, 2017, 37(2): 180-184.
[12] 王敏. 网络遥操作机器人系统时延控制方法研究[D]. 长春: 吉林大学, 2012.
[13] 靳鹏飞. Internet环境下遥操作机器人系统传输时延的分析与研究[D]. 保定: 华北电力大学, 2013.
[14] Yang Y, Hua C, Guan X. Coordination control for bilateral teleoperation with kinematics and dynamics uncertainties [J]. Robotics and Computer-Integrated Manufacturing, 2014, 30(2): 180-188.
[15] Mirkin L, Palmor Z J, ShneidermanD. Dead-Time Compensation for System With Multiple I/O delays: A Loop-Shifting Approach[J]. IEEE Transactions on Automatic Control, 2011, 56(11): 2542-2554.
[16] 宋爱国. 力觉临场感遥操作机器人(1):技术发展与现状[J]. 南京信息工程大学学报: 自然科学版, 2013, 5(1): 1-19.
[17] 纪磊. 基于无源控制的多自由度遥操作机器人系统研究[D].北京: 华北电力大学(北京), 2017.
[18] GAV, Christiansson. Introduction to Analysis and Control in Haptic Teleperation[J]. Delft University of Technology, 207, 2007: 56.
[19] 应旻. 基于力反馈预测的遥操作双边控制技术研究[D]. 北京: 北京邮电大学, 2014.
[20] Sheridan T B. Teleoperation, telerobotics and telepresence: A progress report[J]. Control Engineering Practice, 1995, 3(2): 205-214.
[21] 李宽. 基于绝对稳定性的空间机器人遥操作算法研究[D]. 长沙: 国防科学技术大学, 2007.
[22] 陈俊杰, 黄惟一, 宋爱国, 等. 机器人系统中环境动力学模型及其参数辨识[J]. 东南大学学报: 自然科学版, 2002, 32(1): 64-68.
[23] 朱仁璋, 王鸿芳, 徐宇杰, 等. 从ETS-Ⅶ到HTV——日本交会对接/停靠技术研究[J]. 航天器工程, 2011, 20(4): 6-31.
[24] 高龙琴, 许志峰, 黄惟一, 等. 交互式遥操作机器人实验平台设计及其应用[J]. 东南大学学报: 自然科学版, 2004, 34(6): 775-779.
[25] Sun D, Naghdy F, Du H. Wave-Variable-Based Passivity Control of Four-Channel Nonlinear Bilateral Teleoperation System Under Time Delays[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(1): 238-253.
[26] 陈宜滨, 席宁, 李洪谊. 基于事件的控制理论研究及其应用[J]. 机械工程学报, 2012, 48(17): 152-158.
[27] 邓启文. 空间机器人遥操作双边控制技术研究[D]. 长沙: 国防科学技术大学, 2006.
[28] 郭语, 孙志峻. 基于扰动观测器的时延双边遥操作系统鲁棒阻抗控制[J]. 機械工程学报, 2012, 48(21): 15-21.
[29] Motamedi M, Ahmadian M T, Vossoughi G, et al. Adaptive sliding mode control of a piezo-actuated bilateral teleoperated micromanipulation system[J]. Precision Engineering, 2011, 35(2): 309-317.
[30] Mohammadi K, Talebi H A, Zareinejad M. A novel position and force coordination approach in four channel nonlinear teleoperation[J]. Computers & Electrical Engineering, 2016, 56.
[31] Kau S W, Lee H J, Yang C M, et al. Robust H ∞ H ∞ mathContainer Loading Mathjax, fuzzy static output feedback control of T-S fuzzy systems with parametric uncertainties if[J]. Fuzzy Sets, Systems, 2007, 158(2): 135-146.
[32] 刘冬雨, 刘宏, 黄龙飞. 基于Smith预测控制的空间机器人遥操作研究[J]. 空间控制技术与应用, 2015, 41(5): 19.
[33] 白国振, 俞洁皓. 基于改进模糊神经网络的 PID 参数自整定[J]. 计算机应用研究, 2016, 33(11): 3358-3363.
[34] 陈章, 梁斌, 张涛, 等. 一种基于切换控制律的机器人双边遥操作方法[J]. 宇航学报, 2015, 36(4): 410-418.
[35] 日本机器人学会. 机器人技术手册[M].北京: 科学出版社, 2007.
[36] 景兴建, 王越超, 谈大龙. 遥操作机器人系统时延控制方法综述^1)[J]. 自动化学报, 2004, 30(2): 214-223.
【通联编辑:谢媛媛】
