
基于无人机测绘的地理信息定位技术
2018-11-13 05:31王怀宝
现代电子技术 2018年22期
王怀宝
摘 要: 无人机测绘中的地理信息定位技术是航空遥感领域的重要发展方向。传统方法主要是利用地理信息影像的特征进行分析,忽略了地理信息定位的准确性。为此,提出一种基于三角测量的无人机测绘地理信息定位方法。将无人机采集的影像进行拼接、几何纠正、配准和融合,建立无人机测绘的地理信息定位坐标。在此基础上,利用误差方程公式计算地理信息定位的地面控制点,将控制点向量坐标当作带权虚拟的观测值,根据地理信息控制点进行分类,选取清晰的无人机影像和定位标志,计算三角测量的无人机测绘地理信息定位的平均值和均方差,实现无人机测绘的地理信息定位技术。实验结果表明,提出方法不仅可以获得高分辨率的地理信息影像,还可以提高地理信息定位的准确性。
关键词: 无人机; 地理信息; 定位技术; 几何纠正; 影像拼接; 三角测量
中图分类号: TN961?34; TP391 文献标识码: A 文章编号: 1004?373X(2018)22?0130?03
Abstract: The geographic information positioning technology based on UVA surveying and mapping is an important development direction of the aeronautical remote sensing field. In the traditional method, the characteristics of geographic information images are mainly used for analysis, which ignores the accuracy of geographic information positioning. Therefore, a geographic information positioning method based on the triangulation in UAV surveying and mapping is proposed. Splicing, geometric correction, registration and fusion are performed for images collected by the UAV, so as to establish the geographic information positioning coordinates for UAV surveying and mapping. On this basis, the error equation formula is used to calculate the ground control points for geographic information positioning. The vector coordinates of control points are taken as virtual weighted observation values, and classified according to geographic information control points, so as to select clear UAV images and positioning markers. The average value and mean square error are calculated for geographic information positioning based on the triangulation in UAV surveying and mapping, so as to realize the geographic information positioning technology based on UVA surveying and mapping. The experimental results show that the proposed method can not only obtain high?resolution geographic information images, but also improve the accuracy of geographic information positioning.
Keywords: UVA; geographic information; positioning technology; geometric correction; image splicing; triangulation
0 引 言
随着社会经济建设的发展,地理信息成为分析空间框架和数据的基础。地理信息可以反映出地球表面的自然现象和社会要素,包括形态和位置等信息。地理信息具有空间性和时效性,其反映出数据的信息变化程度。地理信息数据的获取方式多种多样。利用无人机遥感技术对地理信息进行定位,可获得不同时效和不同尺度的地理信息数据,为社会经济建设的发展提供依据[1]。无人机遥感技术具有灵活、高效的特点,利用其对地理信息图像进行采集,在采集的图像中提取出地理信息并对其定位成为研究的热点[2]。
无人机测绘地理信息定位技术可以利用无人机遥感系统搭建无人机平台,并对地理信息进行定位。无人机的起飞方式有直升式和滑翔式等,降落方式有滑降和伞降等。无人机的动力来源有油能和电能。航线的设计和导航系统是无人机测绘的控制核心[3]。无人机测绘地理信息技术被广泛应用在众多测绘部门,并起到重要作用。作为一种新的地理信息定位技术,需要结合实际情况和需求,实现无人机技术在地理信息定位中的应用。文献[4]提出一种基于特征点优化算法的无人机测绘的地理信息定位方法,将无人机测绘的影像进行网格划分,根据网格影像的信息熵来计算特征点的数量,得出匹配率较高地理信息位置,但该方法存在准确性低的缺点。文献[5]提出一种基于纹理影像提取方法的无人机测绘的地理信息定位方法,建立影像之间的关系表达式,计算地理影像的灰度值,得到纹理指标。该方法能够实现地理信息分类均匀,但此该方法获取的地理信息影像分辨率较低。针对上述方法存在的问题,提出基于三角测量的无人机测绘地理信息定位方法。
1 无人机测绘的地理信息定位技术研究方法
1.1 无人机遥感技术对图像影像的拼接
利用无人机遥感技术可以分析影像的分辨率,通过像元的大小和相机的焦距,计算出比例尺对无人机飞行的高度要求。无人机遥感技术的像幅小,影像数据多,是低空遥感技术。若想得到完整的地理区域影像,需要对图像进行拼接测绘。无人机自身较轻,在低空飞行时会受到周围的气流影响,导致飞行不稳定,故需对无人机影像进行拼接、几何纠正、配准和融合[6]。
通过对地理信息的查询获得一些无人机影像,再把所有获得的无人机影像拼接起来可以得到区域的完整影像。无人机影像拼接是无人机测绘地理信息定位技术的研究热点。地理地形图和分辨率高的遥感图可以获取到标准的无人机影像。将标准的影像纠正后放到对应的地理图像空间中[7],选择无人机影像和标准的图像进行同名控制,并利用控制点的数据对无人机影像几何变化数学模拟,建立无人机测绘图像和地理信息之间的关系,实现了无人机测绘影像的几何纠正,并且赋予了地理信息的定位。对地理信息的查询采用同一图像,确保了无人机测绘地理影像重叠的正确性[8?10]。
无人机遥感影像的传感器类型有很多,遥感设备包括数码相机、扫描仪、雷达等。无人机遥感常用可见光对地理信息进行观测。随着遥感技术的进步,数码相机的价格合理,分辨率高,使得很多人采用数码相机当作无人机遥感系统的遥感设备,也有很多系统逐渐开始采用光谱成像设备。无人机测绘利用逻辑分类器对图像进行分类和提取信息。分类和提取过程需要确定分类时输入的信息,进而得到分类结果和图像特征。无人机的光谱遥感影像分辨率也很高,将无人机影像与该影像融合,并根据波段的设置,选出不同的无人机影像融合方法,经过融合后的影像具有分辨率高和丰富的信息,无人机融合影像的波段会突显出地理信息的地类,例如植被和耕地等。
1.2 建立无人机测绘图像的地理信息坐标
将上述融合后的影像按地理坐标的信息进行镶嵌,获得全景图。利用GDAL数据转换库(库中包含像素和地理坐标的转换函数),将无人机测绘影像的地理信息坐标进行镶嵌处理,并对其过程进行简化,可以提高图像的拼接效率。地理影像重叠区域不经过处理,直接将后一幅图像覆盖在前一幅图像上,此时,图像的边界会出现错位现象。图像错位的原因是无人机遥感技术拍摄时不垂直,或者无人机镜头变形等,导致无人机拍出的影像像素不均匀无法准确获取地理信息的定位。
为了消除视觉上的错觉,对重叠区域进行处理,将对角线当作拼接线,在拼接线两端选择一定的宽度进行操作,并输出图像。
1.3 三角测量的无人机测绘地理信息定位技术
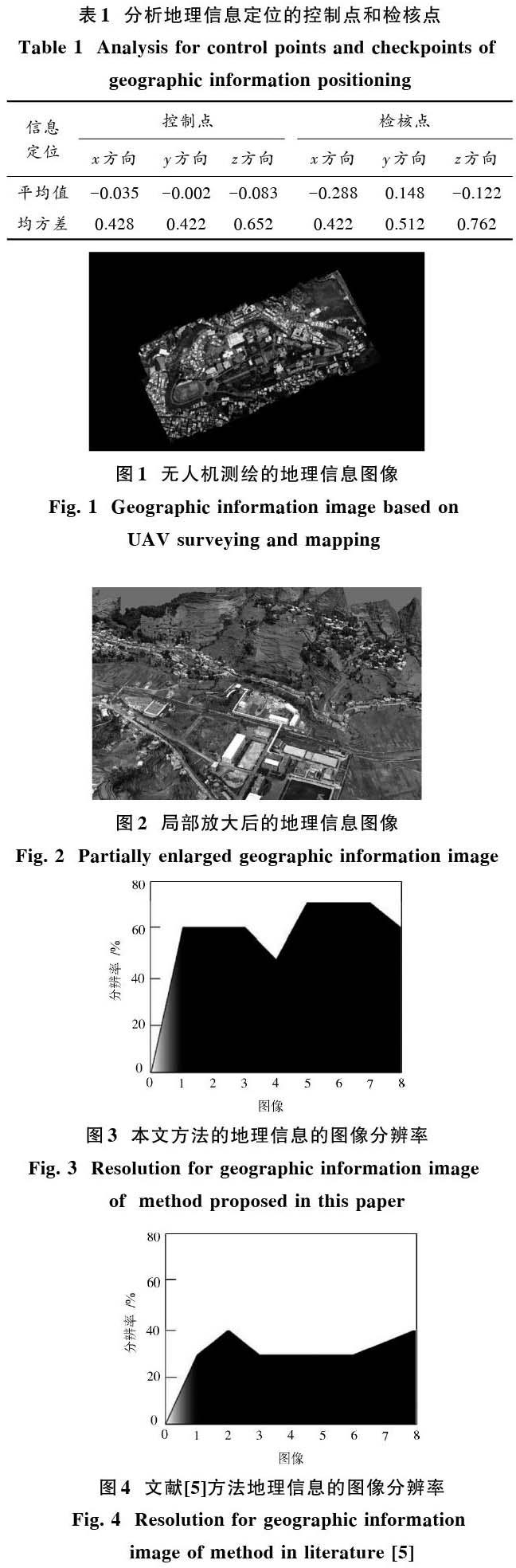
在获取到地理信息坐标的基础上,利用误差方程公式计算地理信息定位的地面控制点。将控制点向量坐标当作带权虚拟的观测值,根据地理信息控制点进行分类。选取清晰的无人机影像和定位标志,计算三角测量的无人机测绘地理信息定位的平均值和均方差。最终实现无人机测绘的地理信息定位技术。对地理信息控制点进行分类,可以分为高程控制点和平面控制点等。在无人机测绘实际采集地理信息过程中,选取清晰的无人机影像和定位标志,例如道路交叉口、田地界线、河流等。对无人机影像处理时,影像与实际地理信息有差异现象[11],需分析三角测量的无人机测绘地理信息定位的平均值和均方差。对地理信息定位的控制点和检核点进行分析,如表1所示。
2 实验结果与分析
实验采用内存为2 GB的计算机,实验的编程环境为Microsoft Visual C++,利用无人机测绘出一个地面图像,并对其进行局部放大,识别各部分地表之间的关系,并对每一部分的地理信息进行定位,如图1、图2所示。
分析图1和图2可知,无人机测绘的地理信息技术可以采集图像,并在图像中提取地理信息。从图中可以看出各部分地表之间的紧凑关系,视觉效果较好。利用图像的观测点、地理坐标等条件对无人机测绘地理信息定位技术的准确性进行对比实验。在分析无人机测绘地理信息定位技术准确性的基础上,进一步对获取到地理信息的图像分辨率进行实验,测试是否能清晰分辨出地理信息的具体位置,测试对比如图3、图4所示。
分析图3、图4可知,本文方法中1~3号图的分辨率为60%;4号图的分辨率为50%;5~7号图的分辨率为70%;8号图的分辨率为60%;8幅图的分辨率在50%~70%。文献[5]方法中1,3~6号图的分辨率为30%;2号图的分辨率为40%;7号图的分辨率为35%;8号图的分辨率为40%;8幅图的分辨率在30%~40%之間。实验结果对比得知,提出方法地理信息影像的分辨率较高,可以清晰地获得地理信息的具体位置。
3 结 论
本文利用无人机测绘对地理信息进行定位研究,测绘出地面图像,并对其进行局部放大,识别各部分地表之间的关系。利用图像的观测点、地理坐标等条件分析无人机测绘地理信息定位技术的准确性。在分析无人机测绘地理信息定位技术准确性的基础上,进一步对获取到地理信息的图像分辨率进行测试,得出本文方法对地理信息定位的准确性较高且获取的图像分辨率较高。
参考文献
[1] 韩义波,陈可.基于GIS信息调度的土地规划优化方法[J].科技通报,2017,33(8):193?196.
HAN Yibo, CHEN Ke. Optimization method of land planning based on GIS information scheduling [J]. Bulletin of science and technology, 2017, 33(8): 193?196.
[2] 刘锋.WebGIS架构下的地理信息系统构建研究[J].计算机测量与控制,2017,25(6):264?266.
LIU Feng. Research on the construction of geographic information system based on WebGIS architecture [J]. Computer measurement & control, 2017, 25(6): 264?266.
[3] 廖凯涛,宋月君,张金生,等.无人机遥测技术在水土保持生态果园改造监测中的应用[J].中国水土保持科学,2017,15(5):135?141.
LIAO Kaitao, SONG Yuejun, ZHANG Jinsheng, et al. UAV remote sensing technology in the application of the ecological orchard construction of soil and water conservation [J]. Science of soil and water conservation, 2017, 15(5): 135?141.
[4] 刘玉轩,蓝朝桢,李参海,等.无人机影像匹配中尺度不变特征应用改进[J].测绘科学,2016,41(7):37?40.
LIU Yuxuan, LAN Chaozhen, LI Canhai, et al. An improved SIFT algorithm for UAV image matching [J]. Science of surveying and mapping, 2016, 41(7): 37?40.
[5] 薛武,张永生,于英,等.沙漠地区无人机影像连接点提取[J].测绘科学技术学报,2017,34(4):405?410.
XUE Wu, ZHANG Yongsheng, YU Ying, et al. Tie points extraction of UAV images in desert area [J]. Journal of geomatics science and technology, 2017, 34(4): 405?410.
[6] 史洁青,冯仲科,刘金成.基于无人机遥感影像的高精度森林资源调查系统设计与试验[J].农业工程学报,2017,33(11):82?90.
SHI Jieqing, FENG Zhongke, LIU Jincheng. Design and experiment of high precision forest resource investigation system based on UAV remote sensing images [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(11): 82?90.
[7] 宋明明,郑文龙,卞国栋,等.基于多时相Landsat8数据的南方丘陵区典型地物信息提取:以秦淮河流域为例[J].科学技术与工程,2016,16(18):209?216.
SONG Mingming, ZHENG Wenlong, BIAN Guodong, et al. Land use classification of typical ground objects in Qinhuai river basin based on multi?temporal Landsat8 OLI data [J]. Science technology and engineering, 2016, 16(18): 209?216.
[8] 韩文霆,李广,苑梦婵,等.基于无人机遥感技术的玉米种植信息提取方法研究[J].农业机械学报,2017,48(1):139?147.
HAN Wenting, LI Guang, YUAN Mengchan, et al. Extraction method of maize planting information based on UAV remote sensing technology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(1): 139?147.
[9] 胡健波,张健.无人机遥感在生态学中的应用进展[J].生态学报,2018,38(1):20?30.
HU Jianbo, ZHANG Jian. Unmanned aerial vehicle remote sensing in ecology: advances and prospects [J]. Acta Ecologica Sinica, 2018, 38(1): 20?30.
[10] 蔚广鑫,洪建胜,王伟斌.无人机激光测量技术在滩涂地形测量中的应用初探[J].应用海洋学学报,2017,36(1):143?149.
YU Guangxin, HONG Jiansheng, WANG Weibin. Application of laser measurement technology with unmanned aerial vehicle on the tidal flat topographic survey [J]. Journal of applied oceanography, 2017, 36(1): 143?149.
[11] 杨忠炯,王卉,董栋.无人机输电线路巡线系统及应用研究[J].电子设计工程,2017,25(4):162?166.
YANG Zhongjiong, WANG Hui, DONG Dong. The application and research of line communication system based on microwave transmission [J]. Electronic design engineering, 2017, 25(4): 162?166.
猜你喜欢
数学物理学报(2019年3期)2019-07-23
家庭影院技术(2018年9期)2018-11-02
北京航空航天大学学报(2017年4期)2017-11-23
自动化学报(2017年5期)2017-05-14
成都信息工程大学学报(2017年6期)2017-03-16
中国工程咨询(2017年12期)2017-01-31
河北林业科技(2016年5期)2016-11-08
安徽地质(2016年4期)2016-02-27
河北遥感(2015年2期)2015-07-18
全球定位系统(2015年4期)2015-02-28
