基于WiFi视频监控系统的物联网机器人的研究
2018-12-12 07:25李志彭
时代农机 2018年10期
张 昭,张 清,李志彭
(沈阳工学院,辽宁 抚顺 113122)
当前市场上成熟的机器人操控系统一般是采用有线或者是单一控制模块的无线遥控系统,本设计准备通过移动互联网来解决上位机控制机器人监控的问题,并最终实现利用互联网控制的机器人解决工作和生活中的具体问题。
1 上位机和下位机系统设计
本项目设计了一个上位机和下位机系统,上位机和下位机用WiFi或移动互联网通信模块进行双工通信,下位机(机器人)使用 STM32单片机、摄像头模块、WiFi模块以及一些传感器模块等,上位机用高级语言编写控制界面显示监控信息以及下位机(车体)控制功能键,并通过这些功能键实现下位机的运动控制,通过移动互联网实现摄像头功监视和机器人的运动控制。
上位机(或手机)通过WiFi发送命令信号,单片机接受到信号后执行命令程序,进而控制机器人行驶。上位机和下位机指令工作流程如图1所示。
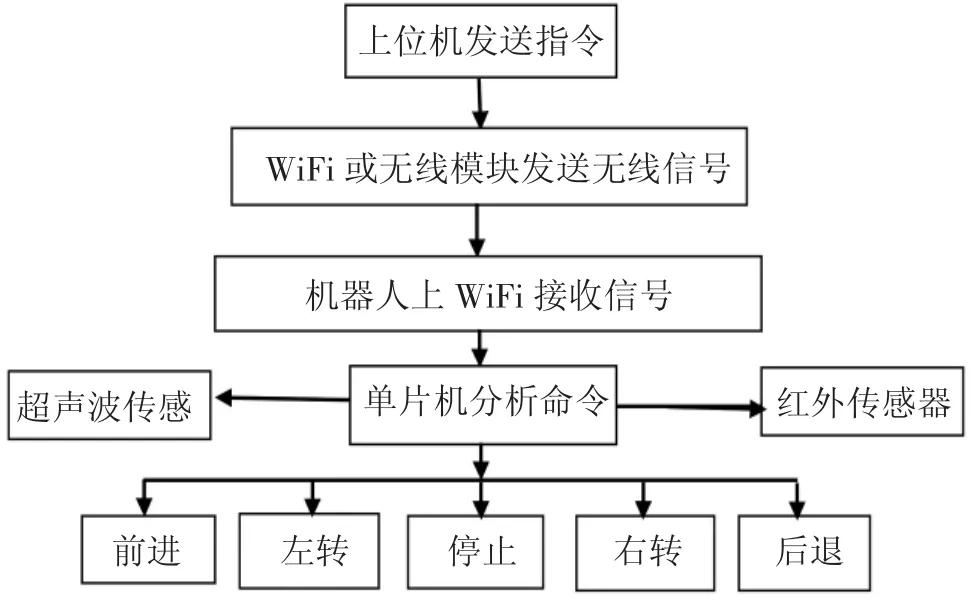
图1 上位机和下位机指令工作流程
机器人小车不但可以通过上位机进行运动控制,还可以通过给小车安装传感器来实现循迹、避障等智能控制。
真正控制下位机(机器人)运动的是STM32单片机。单片机连接电机驱动模块(L298N模块)四个引脚。为起到电路布局的整体化和便捷性,只采用一个电机模块。
采用移动互联网能够克服原来视频直接传输遇到障碍和信号的覆盖问题,使机器人能在一些有移动互联网覆盖的复杂地形中进行工作,从而增加一种机器人运动控制方式和手段以及使用的范围。
2 解决的关键问题
(1)设计控制机器人的上位机,并自行制定一套通信协议。
(2)解决各种智能终端对上位机的兼容性以及对物联网机器人WiFi模块的兼容性。
(3)利用智能终端上位机通过移动互联网作为控制机器人的手段,在某种技术层面来言,解决了利用遥控器等兼容性不高的设备进行控制距离和范围有限的短板。
(4)解决了移动互联网模块与单片机的接口问题,以实现单片机通过移动互联网接收上位机发送的控制信号,在实时视频监控的帮助下,用上位机键盘按键对机器人进行实时操控。
(5)解决机器人全方位的多路视频监控问题,采用多个网络摄像头和上位机多窗口功能。
采用移动互联网能克服基站视频的直接传输遇到障碍和信号的覆盖问题,使机器人能在一切有移动互联网覆盖的复杂地形中进行工作,从而增加一种机器人运动控制方式和手段以及应用的范围。
3 结语
上位机智能终端通过连接WiFi来控制以STM32单片机为核心的智能物联网机器人,可以通过机器人前端多个摄像头所采集到的视频信息传输到智能终端计算机查看,解决了在无线移动互联网环境下利用上位机(或手机)控制机器人运动的问题。这个系统不仅能够为通信工程专业的专业实训提供一真实的实训项目,而且也能为物联网工程专业智能家居应用提供一种解决方案。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
综合智慧能源(2019年1期)2019-01-29
科技与创新(2018年1期)2018-12-23
当代水产(2018年8期)2018-11-02
车迷(2018年12期)2018-07-26
山东工业技术(2016年15期)2016-12-01
北京纪事(2016年5期)2016-05-07
空间控制技术与应用(2015年2期)2015-06-05
汽车维修与保养(2015年8期)2015-04-17