能效最优准则下的无人机中继系统的功率分配算法
2018-12-19 03:23严晓琴邢灵芝欧阳键朱卫平
数据采集与处理 2018年6期
严晓琴 邢灵芝 颜 俊 欧阳键 朱卫平
(1.南京邮电大学通信与信息工程学院,南京,210003;2.北方信息控制研究院集团有限公司,南京,211153)
引 言
近年来,无线中继技术得到了充分的关注和发展[1-2]。相比于传统的单跳通信,中继辅助传输的多跳通信技术可以显著扩大通信网络的覆盖范围、提高通信系统可靠性和增加系统通信容量。虽然通信卫星可以实现中继通信功能,但造价昂贵、传输延迟大、建设周期长并且维护成本高,还存在通信盲区等缺点,导致其不能得到广泛的应用。与之相比,无人机(Unmanned aerial vehicle, UAV)飞行器作为中继平台具有机动性好、部署和控制灵活、高空作业覆盖范围大和通信设备更新方便等独特优势,已经在战场侦察、环境监测等众多领域显示了广阔的应用前景[3-4]。
利用无人机作为中继传输平台能够快速、方便地建立起一条高效可靠的通信数据传输链路,因此基于UAV的中继传输技术到了国内外学者的广泛关注。文献[5]研究了在存在障碍的条件下,用无人机作为通信中继节点的通信模型,并通过标签校正算法达到优化目标,获取无人机中继节点的最佳位置。文献[6]研究了非对称衰落信道下的无人机中继传输系统,提出了输出信噪比最大化准则下的波束形成优化方案,并推导出系统中断概率、遍历容量和平均误符号率等无线通信系统主要性能指标的理论表达式。文献[7]研究了多无人机完成通信中继任务过程中的搜索路径规划和通信性能优化问题。文献[8]研究了无人飞行器中继双跳无线链路中的优化设计及性能分析,证明了UAV中继平台配置多天线和优化设计所具有的优越性。但是目前的研究重点主要集中在中继的最优布置、飞行路径和网络性能优化等问题,对于功率分配算法的研究较少。无人机由于自身体积限制而能量有限,功率作为无人机中继通信系统的重要资源,其分配问题将直接影响各条链路的性能,通过功率分配算法能实现对功率的优化分配,从而能够有效提升无人机中继通信系统的性能。
在资源日益紧缺的时代, 降低能耗成为通信业研究的一个热点[9-10]。在节点能量有限的无线中继系统中功率非常重要,对功率的优化分配能够有效提升系统能效性能。目前国内外对无线通信系统能效的功率分配算法开展了广泛的研究工作。对于正交频分复用(Orthogonal frequency division multiplexing, OFDM) 系统而言,文献[11]提出了基于在平坦衰落信道载波数和用户发射功率的联合分配方法,但是该算法仅考虑了发射功率对能效的影响,用户发射功率只占整个通信系统所耗用功率的小部分,因此势必会导致很大误差。文献[12]将系统模型从平坦衰落信道进一步推广到选择性衰落信道,基于解码转发(Decode-and-forward, DF)中继协议,在保证两跳速率相等的情况下,提出了一种链路自适应算法来进行中继选择和功率分配。文献[13]提出了一种多目标算法来实现一个用户选择和功率分配方案,从而在保证吞吐率最大化的同时使发射功率最小化,但是并没有考虑电路功耗对系统的影响。文献[14]研究了OFDM下行系统中最大化权重总能效问题,通过分别求解系统载波和功率分配从而得到最大化权重能效,并提出了最优和次优的两个算法,但是该算法仅通过贪婪算法求出了目标函数最大化的下边界。因此目前的功率分配算法[12-14]主要还是建立在最优化的迭代算法上,计算复杂度较高,闭合形式解更是难以求得。
基于上述讨论,本文主要研究了放大转发(Amplify-and-forward, AF)协议下,无人机中继通信系统能效的功率分配问题。本文算法以系统能效最大化作为设计目标,在系统总功率固定和每跳功率受约束的条件下,将功率分配问题转化为限制性条件下的最优化数学模型,然后根据最大熵定理,获得最优波束形成方案。在此基础上,通过将信噪比公式近似等效为高信噪比公式,原来求解非凸优化问题就被转化成为求解凸优化问题。最后利用基于KKT(Karush-Kuhn-Tucker)条件的凸优化算法,得到功率分配方案的闭合解。通过计算机仿真实验,不仅验证了所提功率分配算法的正确性,而且分析了关键参数对系统能效的影响。
1 基于UAV的中继通信系统模型
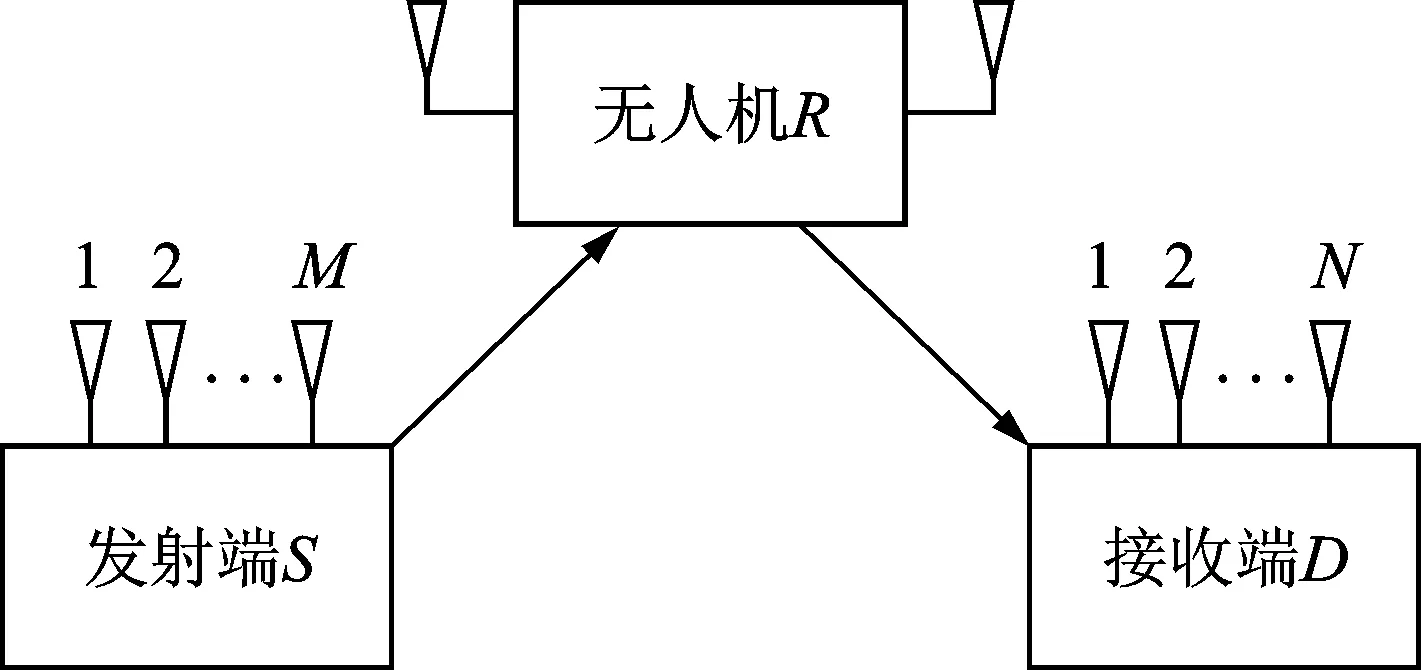
图1 无人机中继传输模型 Fig.1 UAV relay transmission model
图1为基于UAV的中继传输系统模型。在系统发射端S和接收端D分别安装M根天线和N根天线。无人机中继R由于体积较小只安装1根天线。假设信号源节点和目的节点位于开阔地域,它们和无人机之间有着较强的直达径的通信链路,无线信道均满足莱斯(Rician)分布,则该系统中S-R链路和R-D链路均满足Rician分布。实际上,由于瑞利信道是Rician信道的特殊形式,因此Rician信道更加符合无人机中继系统的应用场景。若采用放大转发协议[15],那么中继通信的过程如下:
(1) 在第一个时隙,发射端S将发送的信号x(t)进行波束形成发射出去,在中继端R接收到的信号可以表示为
(1)

(2)

(3)
式中k为Rician因子,定义为接收信号直达径分量能量与散射分量平均能量之比。
(2) 在第二个时隙,中继端R首先采用协议先对信号yr(t)乘以一个固定增益的放大因子G[18],随后以一定的功率将信号转发至目的节点D,节点D对接收的信号进行波束形成处理,其输出信号可表示为
(4)
(5)
g为受到路径损耗和和Rician衰落影响的信道衰落向量,可以表示为
(6)

根据式(4,5)得到中继系统接收端的输出信噪比表达式为
(7)

2 基于能量效率的中继传输功率分配算法
2.1 优化问题的形成
上述中继通信系统的功率消耗主要包括发射功率、消耗的电路功率、效率的转换以及冷却消耗等。根据EARTH计划中给出的功率消耗模型[19],发射节点和中继节点的总功率消耗可以表示为
PT,1=a1P1+b1
(8)
PT,2=a2P2+b2
(9)
那么,系统总功率消耗可以表示为
PT=a1P1+a2P2+b1+b2
(10)
系统能量效率描述为系统频谱效率除以总的功率消耗,可以表示为
(11)
因此,基于系统能量效率最大的功率分配问题可以建模为以下的优化模型

P1+P2=C
Pi≤Pmax,i=1,2
(12)
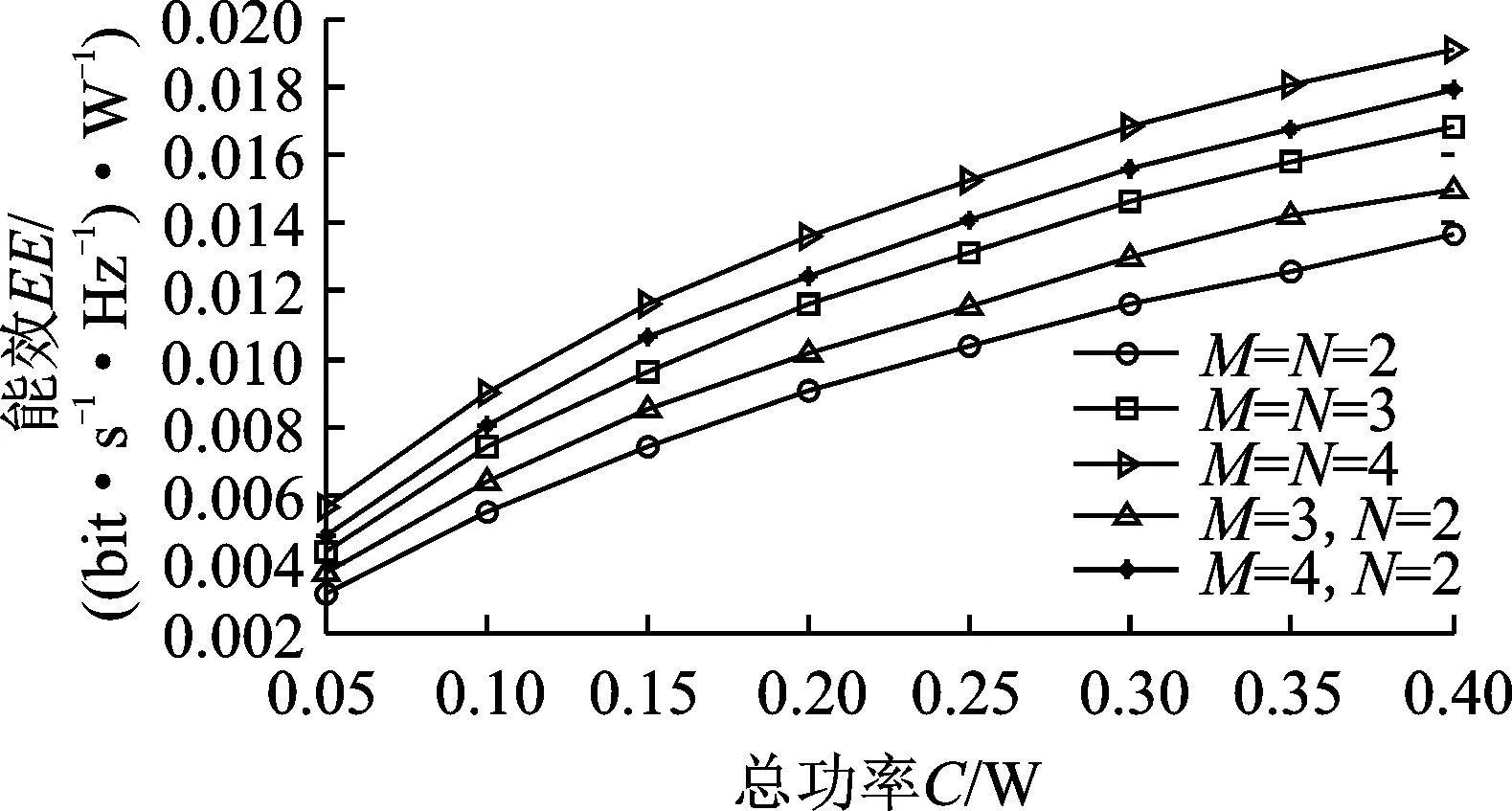
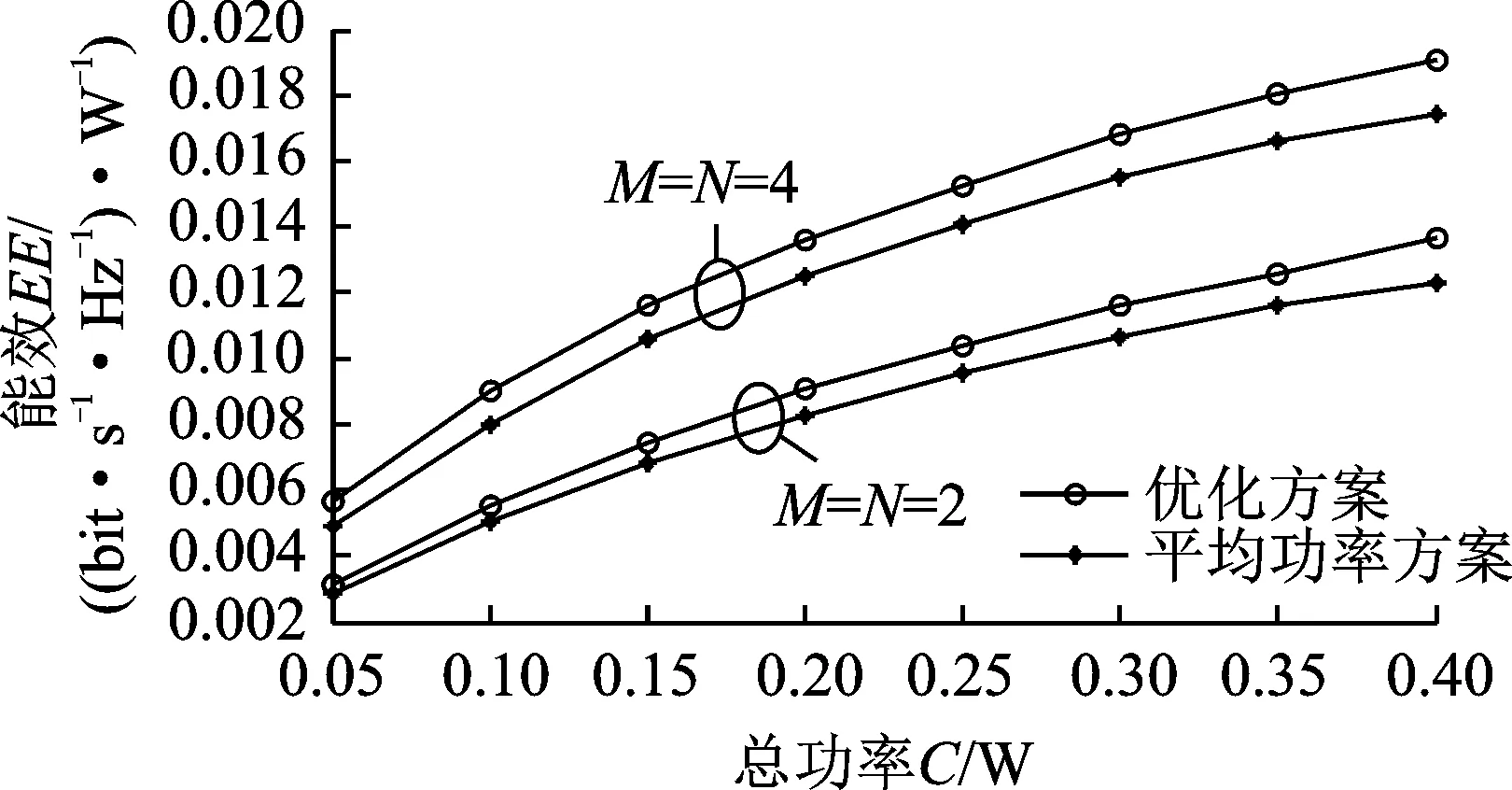
式中:Pmax为每跳最大发射功率上限,Pmax=KC, 1/2 通过2.1节建立的优化模型,可看到系统能量效率与波束形成权向量wi和发射功率Pi(i=1,2)有关。要获得最大的系统能量效率,必须要对上述两个参数进行优化。因此,与文献[8]类似,本文提出的优化思路为:在固定发射功率的前提条件下,对波束形成权向量进行优化。然后将最优的波束形成权向量代入优化模型中,对功率参数进行优化,进而得到最大的能量效率。 2.2.1 波束形成权向量的优化 在发射功率Pi(i=1,2)固定的情况下,结合式(7), 优化模型可简化为 (13) 由于波束形成权向量w1和w2相互独立,式(13)可以分别简化为以下两个优化问题 (14) 和 (15) 对于式(14),依据广义Rayleigh最大熵定理[20],可以得到 (16) 式中λmax(hhH)表示矩阵hhH的最大特征值。只有在以下条件下 (17) 达到最大值取等号。同理可得可以得到式(15)的最优解 (18) 将得到的最优波束形成权向量代入原式,优化模型可以重新表示为 s.t.P1+P2=C Pi≤Pmax,i=1,2 (19) 2.2.2 发射功率的优化 根据文献[21]的研究成果,发现式(19)所表示的目标函数不是凸函数,但是如果忽略目标函数中信噪比表达式分母中的1,那么通过高信噪比近似,式(19)中的数学问题可以转化成伪凸优化问题。只有在高信噪比的情况下,目标函数中信噪比表达式的分母中含有的常数 1才可以忽略,才能利用式(20)求解凸优化问题。而对于低信噪比情况,常数1对于信噪比的值影响很大,不可以忽略不计,那么数学问题即是求解式(19)中的非凸优化问题。对于非凸优化问题,在理论上无法保证找到全局最优解,因为可行域集合可能存在无数个局部最优点。转化后的凸优化问题如下 s.t.P1+P2=C Pi≤Pmax,i=1,2 (20) 于是,可以利用拉格朗日优化算法进行最优化求解,拉格朗日函数可以表达为[22-23] (21) 由凸优化理论的KKT条件可知 (22) Pi-Pmax≤0 (23) (24) λi(Pi-Pmax)=0 (25) λi≥0 (26) 式(22—26)中i=1, 2。由式(22)可得 (27) (28) 由于拉格朗日乘子λ1≥0,λ2≥0,所以分情况进行讨论和求解。 当λ1=λ2=0时,由式(27,28)可以获得 (29) (30) 下面根据式(23)分以下4种情况来验证KKT条件: (1)P1=Pmax,P2=Pmax时,P1+P2>C,与式(24)不符,故舍去。 (2)P1=Pmax,P2 (31) 由式(31)可推导出 (32) 此时P2=C-Pmax,与KKT条件相符。 (3)P1 (33) (34) (4)P1 (35) (36) 此时P1=C-Pmax,与KKT条件相符。 由上述分析总结得到 (37) 在非凸优化的情况下,理论上无法保证找到全局最优解,而本文将非凸优化问题转化为凸优化问题,利用KKT条件求得闭合形式解。凸优化的情况下,KKT条件能保证得到的是全局最优解,所以本文算法能保证收敛到全局最优。 关于在KKT条件下的其他情况讨论见附录。 本节对所提出的无人机作为中继联合信源在能效最大化准则的功率分配方案进行了蒙特卡洛仿真和验证,功率消耗模型参数参考文献[19]中EARTH计划的建模,[a1,b1]和[a2,b2]可设置为[4.4,8.7],[3.14,69]和[7.25,469]。3种场景的选择分别对应为微微基站、微基站和宏基站。联系实际,针对无人机中继,本节将[a1,b1]设置为[3.14,69],[a2,b2]设置为[3.14,69] 。假设中继节点分布在信源节点到接收节点的连线上,本文将信源节点到目的节点的距离归一化为1,即d1+d2=1。 图2给出了Rician因子k=6,d1=d2=0.5情况下,总功率C[24]从0.05 W变化到0.4 W时,利用穷举搜索法与本文最优化方案得出的系统能效的对比曲线,两种方案的天线数设置成相同。比较中继系统发射端和接收端均配置2根和4根天线的情况,可以看出两条曲线基本吻合,这也证明了本文所提无人机中继最优化功率分配方案的正确性。另外,从图2中可以看出系统最优能效随着中继系统总功率的增加呈现增加的趋势。 假定源节点-无人机中继距离d1固定,分别取信源到无人机中继的距离为0.1~0.9共9个点,总功率C设置为0.4 W,Rician因子k设置为6。在发射端和接收端分别都安装2,3和4根天线时,比较无人机中继位置变化对系统最优能效的影响,如图3所示。通过图3可以发现,无人机中继位置对通信系统能效有很大的影响,当d1<0.5时,系统的最优能效随中继点远离信源的距离而增大,当d1>0.5时,系统的最优能效开始呈下降趋势。 图2 本文优化算法与穷举搜索法对比结果 Fig.2 Comparison of optimization algorithms and exhaustive search 图3 系统能效随d1变化曲线 Fig.3 System energy efficiency versusd1 图4给出了Rician因子k=6,d1=d2=0.5情况下,无人机中继系统发射端和接收端安装不同天线数量时,系统最优能效随着通信系统总功率的变化曲线。图4中,在总功率C=0.25 W时,以某一点为例,M=N=4时的能效为0.015 22 (bit·s-1·Hz-1)·W-1,M=4,N=3时的能效为0.014 05 (bit·s-1·Hz-1)·W-1,提升0.001 17 (bit·s-1·Hz-1)·W-1。提升比例若定义为:增加的能效值/原能效值×100%,那么M=N=4比M=4,N=3仅在发射节点处多安装了1根天线,但M=N=4比M=4,N=3在能效性能上提升了8.3%。从图4中可看出,系统最优能效随着天线数量的增加而明显增加。这是由于天线数量增加能够有效提升无人机中继系统的分集性能。 图5给出了M=N=2和M=N=4情况下,本文功率分配优化方案和信源-无人机中继平均功率分配方案的系统能效对比曲线,其中Rician因子k=6,d1=d2=0.5。从图5中可看出,当总功率从0.05 W变化到0.4 W时,本文功率分配优化方案得到的能效性能相对信源-无人机中继平均功率方案有显著提升,并且随着总功率的增加,能效性能提升明显。另外,当系统安装天线数M=N=4时,本文功率分配优化方案相对平均功率方案的性能提升比安装天线数M=N=2时的性能提升更大。 Fig.4 System energy efficiency under different num-bers of antennas versusC 图5 本文优化方案与平均功率方案对比结果 Fig.5 Comparison of optimization scheme and aver-age power scheme 本文以Rician衰落信道下的无人机中继传输系统为研究背景,研究了基于能效最优的功率分配算法。首先建立基于功率分配的优化模型,将功率分配问题转化为求解最大系统能效的优化问题。 在最优功率分配的求解过程中,先固定发射信号功率,获得优化的波束形成方案;然后通过大信噪比区间近似等效,将求解非凸优化问题转化为求解凸优化问题;最后利用KKT条件,计算得出功率分配方案的闭合形式解。仿真实验表明:本文算法获得的闭合解接近于循环迭代,从而降低了算法复杂度。与平均功率分配算法相比,本文算法能够得到更大的系统能量效率,从而提高了通信系统的性能。对于无人机机动情况下的功率分配问题,将是本文下一步的研究方向。 附录 1. 当λ1>0,λ2=0时,根据式(23)分以下4种情况来验证KKT条件: (1)P1=Pmax,P2=Pmax时,P1+P2>C,与式(24)不符,不满足KKT条件,故舍去。 (2)P1=Pmax,P2 (A1) (A2) (3)P1 (4)P1 2. 当λ1=0,λ2>0时,根据式(23)分以下4种情况来验证KKT条件: (1)P2=Pmax,P1=Pmax时,P1+P2>C,与式(24)不符,不满足KKT条件,故舍去。 (2)P2=Pmax,P1 (A3) (A4) (3)P2 (4)P2 3. 当λ1>0,λ2>0时,根据式(23)分以下4种情况来验证KKT条件: (1)P1=Pmax,P2 (2)P1=Pmax,P2=Pmax时,与式(24)不符,不满足KKT条件,故舍去。 (3)P1 (4)P12.2 优化问题的求解
3 仿真和分析
4 结束语
 猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19印刷工业(2020年5期)2020-03-29无线电通信技术(2019年1期)2019-12-24北京航空航天大学学报(2019年9期)2019-10-26雷达学报(2017年3期)2018-01-19流程工业(2017年4期)2017-06-21航天器工程(2015年3期)2015-10-28西南石油大学学报(自然科学版)(2015年5期)2015-04-16电子设计工程(2015年16期)2015-02-27自动化博览(2014年6期)2014-02-28
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19印刷工业(2020年5期)2020-03-29无线电通信技术(2019年1期)2019-12-24北京航空航天大学学报(2019年9期)2019-10-26雷达学报(2017年3期)2018-01-19流程工业(2017年4期)2017-06-21航天器工程(2015年3期)2015-10-28西南石油大学学报(自然科学版)(2015年5期)2015-04-16电子设计工程(2015年16期)2015-02-27自动化博览(2014年6期)2014-02-28