
基于多普勒测向和信号强度测距原理的舰员落水报警定位装置
2019-01-08 01:56,,
船海工程 2018年6期
,,
(1.海军工程大学 舰船综合试验训练基地,武汉 430033;2.海军东海舰队,浙江 宁波 315812)
水面舰艇飞行甲板空间狭小,单位作业空间人员利用率高,需完成舰载机起飞、降落、再次出动保障等。多舰员、多装备、高强度并行作业,舰员在不经意间易发生落水事故,而由于单个舰员相对于飞行甲板体积小,发生落水事故后不易被察觉和发现。此外,当水面舰艇发生灾害事故时,更容易发生落水事故[1-3]。针对上述问题,设计了一种由落水信号发射器、无线信号接收器和信号定位器组成,实现信号发送、状态显示和信号定位等功能,保障舰员落水快速援救的舰员落水报警定位装置。
1 总体设计
装置的整体结构见图1。当甲板舰员落水后,携带在舰员身上的发射器在海水或手动驱动的作用下迅速发射无线信号,安装在舰桥的接收器启动并发出声音报警信号,LED屏上显示发射器的初始信息,确定舰员落水的ID号及身份,安装在舰桥甲板上的定位天线接收信号后也迅速在定位器上显示舰员落水的定位信息,救援队员通过定位器实施定位搜救。

图1 装置的整体结构
2 硬件设计
2.1 信号发射器

图2 落水信号发射器工作原理
2.2 信号接受器
落水信号接收器的高频通信模块将无线信号进行解调,形成数字信号,经微处理器模块向落水信号接收器主机输出人员代码信息,落水信号接收器主机实现报警信息的显示[7-8]。工作原理见图3。

图3 信号接受器工作原理
落水信号接收器由天线、信号转换盒、主机(含液晶显示器)、电源转换器组成。当接收器接收到发射器的信号后,压电蜂鸣器将发出报警信号,信号强度为100 dB;当发射器关闭或者发射器发送“清除”指令到接收器,或者操作者在LED屏上启动“静音”按钮后,压电蜂鸣器自动关闭。液晶显示屏是救援舰员和舰员落水间的直接交互界面(见图4),分为待机状态和工作状态两种工作模式。待机状态是指落水事故发生前,接收器时刻处于警戒搜索的状态,工作状态是指落水事故发生后,接收器搜索工作状态;此时液晶显示屏上显示失事舰艇的信息,包括舰艇舷号,落水人员的姓名、军衔以及接受信号的计时等。如果是多艘舰艇编队航行,相邻舰艇也可搜索到失事舰艇舰员落水人员的信息,在本舰的接收器上显示相关信息。无论是失事舰艇还是相邻舰艇的接收器液晶显示屏上都有两个辅助信息:发射器电源电量信息和接收信号强度指示信息。若舰船已经接入GPS或北斗信号,则界面将显示接入GPS或北斗信号人员落水信息界面。

图4 落水接收器液晶显示屏工作界面
2.3 信号定位器
信号定位器有固定式和便携式两种。固定式安装在舰艇驾驶室,便携式由救援舰员便携手持。信号工作原理见图5。定位器高频解调板解调方位天线收到的载波信号,由信号定位器核心处理板分析解调信号。如果信号中包含满幅载波,则表明有人落水,此时定位器核心处理板控制天线电磁转动,以获得确切的方位和距离信号,并将此信号处理成可供显示板显示的信号送其显示。此外,解调信号中还包含求救报警声音信号,定位器核心处理板将其信号放大处理后驱动报警喇叭。

图5 信号定位器工作原理
信号定位器的操作在主机面板上进行,主机面板上有:方位测向(DF)显示器、频率选择键、扬声器音量调节、接收信号强度指示器、靠近目标信号指示器、复原按钮、频率信号检测键、开/关、船艏指向箭头等,提供显示和舰员操作。
1)方位测向显示器,显示落水人员的方向。
2)频率选择键,选择信标频率。
驱动形式 ....................................................中置后驱
3)扬声器音量调节键,调节声音的大小。
4)接收信号强度指示器,指示离落水舰员的大致距离。
5)靠近目标信号指示器,指示已经靠近落水舰员。
6)复原按钮,搜救结束后恢复初始设定数值。
7)频率信号检测键, 检测收到的信号是否为本系统的落水信号发射器发出的信号。
8)电源开/关,开启关闭主机和LED亮度调节。
9)舰艏指向,标识船艏方向。
3 软件设计
软件设计包括4个部分,舰员代码通信系统软件的设计和编程,落水信号发射器软件的设计和编程,落水信号接收器软件的设计和编程,信号定位器软件的设计和编程。核心是信号定位器软件设计,其采用IARFORNEC作为开发环境,采用C语言编制,用于接收显示落水信号发射器发来的定位定向信号信息,设计流程见图6。
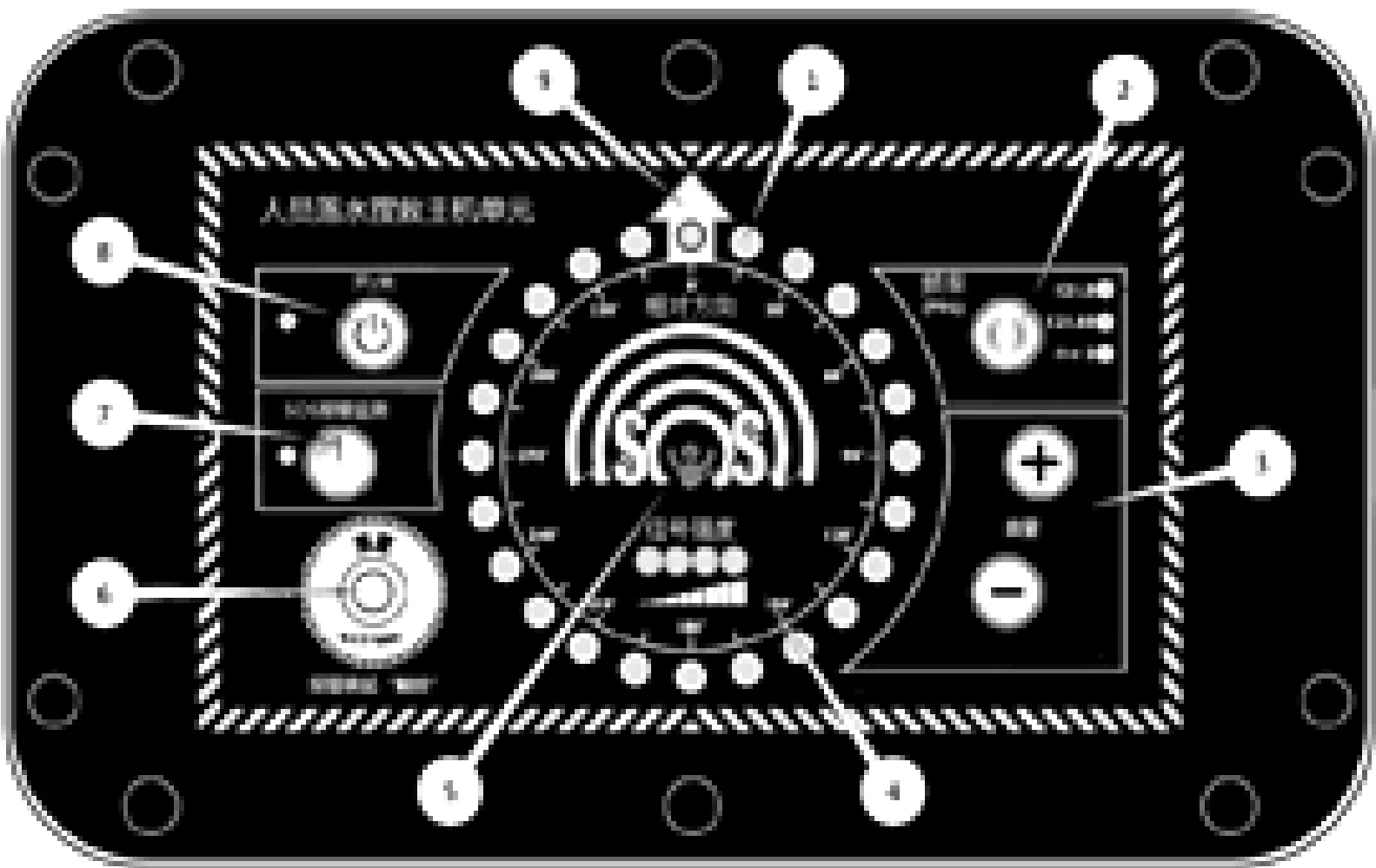
图6 信号定位器软件设计流程
4 测向和定位算法
4.1 多普勒测向算法
多普勒测向机是指由单一天线旋转,利用接收机产生的多普勒频移进行测向的设备[9-10]。如果天线沿着一个直径D的圆形轨道运动,旋转角频率为ω的多普勒测向机,瞬时输出电压u(t)。
u(t)=A(t)cos[ωct+φ(t)+ηcos(ωRt-θ)]
(1)
式中:A(t)为接收信号的幅度;ωc为载波信号频率;φ(t)为调制信号的瞬时相位;η=(πDcosγ)/λ,γ为仰角,λ为波长;ωR为测向天线旋转的角频率;θ为方位角。对于窄带信号,特别是A(t)=A,φ(t)=φT,使用一个频率解调器进行处理,解调器的输出信号φ(t)。
φ(t)=ωct+φT(t)+ηcos(ωRt-θ)
(2)
在理想的频率调制时,通过相位输出信号φ(t)求时间导数,可求解瞬时频率ω(t)。
(3)
滤除直流分量ωc后得到的解调信号SD(t)。
SD(t)=-ηωRsin(ωRt-θ)
(4)
对式(4)信号在特定时间进行A/D采样,就可计算出仰角γ和来波的方位角θ。
4.2 信号强度测距算法
采用基于信号强度SSOA的测距原理进行落水舰员位置定位,然后根据落水舰员的方位角和舰艇自身的位置坐标确定落水舰员的位置范围。由于海面对电波的传输存在干扰,接收信号的强度会受到影响,有时候表现为信号强度加大,有时候则是减弱[11-12]。通过对某一个环境进行多次实测,得到这一环境下的传播距离和路径损耗的关系,并且归纳出“距离-损耗”模型,一般形式如下。
(5)
式中:d0为参考距离;P0为距离为d0时接收到的信号强度;d是实际距离;P为接收信号强度;n为路径损耗系数;ξ是遮蔽因子。该因子的均值为0,均方差为σ的正态随机变量,与传播距离无关,即相同的传播距离,可能被测到的损耗完全不同,甚至相差几倍。因此,对(5)式进行修正:
(6)

(7)
由“距离-损耗”模型可以把迭代过程中得到的虚拟的距离转化为虚拟的信号接收强度,正确选择λ值,可以使估计位置越来越精确。迭代终止的条件为找到最小的自然数K,使之满足:
(8)
即落水目标和参考点之间的距离收敛,可以用ML算法来进行较为准确的估计,在实际应用过程中,由于计算出的距离存在偏差,故将距离划分为4个范围,对应4种信号强度范围,显示在方位定位器主机上。
4.3 海试试验
为测试装置测向和测距的能力,首先将信号发生器置于固定位置水域,采用GPS测量出落水信号发射器和接收机之间的距离和角度,然后当信号发射器发射求救信号时,记录信号发射器相对接收机艏向的方向角度和信号强弱度。
4.3.1 试验环境要求
落水信号发射器与测向器之间无连续建筑物遮挡;落水信号发射器与测向器之间的海拔高度在±500 m内;试验场地内的电磁信号场强≤50 mV/m。
4.3.2 设备安装要求
落水信号发射器安装载体位移速度5 km/h;报警信号接收器和测向器安装载体速度≥5 kn;报警信号接收器和测向器的安装高度≤10 m。海试试验结果见表1。
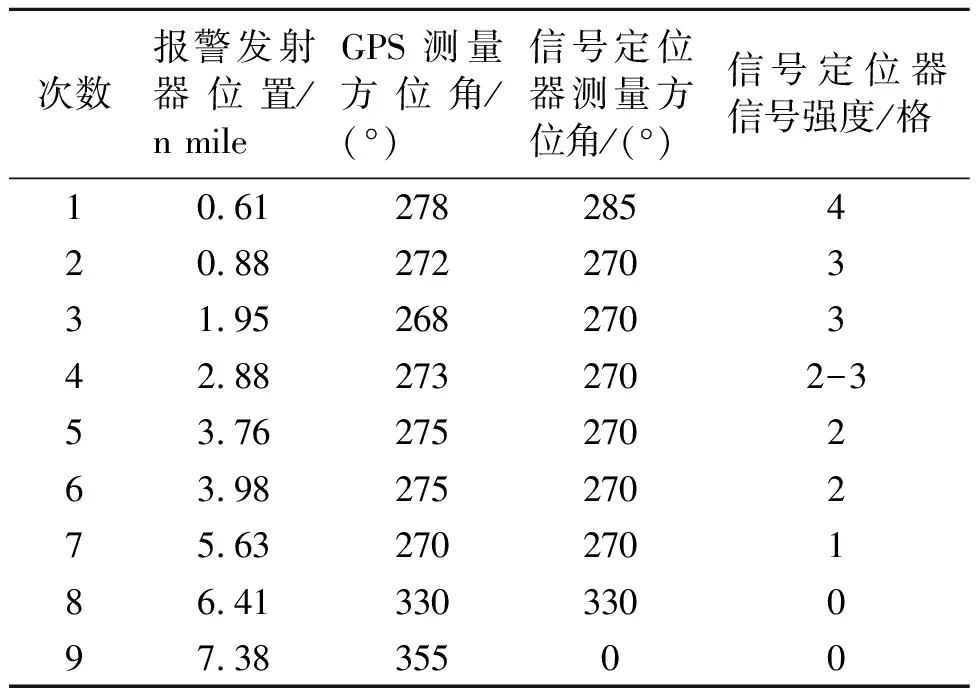
表1 海试试验结果
从海试测试结果看,信号方位测量误差在1%以内,落水报警装置的最大试验范围为6 n mile。
5 结论
落水报警装置为国内舰船首次采用无线信号发射器、接收器和定位器闭环设计模式,采用基于多普勒测向和信号强度测距原理的数字编码和双频道通信技术,实现报警和定位功能。采用嵌入式软件架构设计,实现显示当前落水人员的信息,滚动显示当前多个落水人员的信息,查询注册舰员的历史信息,自动判别和显示收到的频率信号,具有添加、修改和删除注册舰员信息等多项功能。国内现装备在落水人员报警和定位的工作原理上都是采用GPS系统实现人员的报警和定位。该定位信号保密性较差,易暴露搜救船自身的方位,而本装置采用无线信号被动接受方式,具有较高的隐蔽性,与美国等国家海军采用同样的工作原理和方式,作用距离为6 n mile,达到国外同类产品水平。
猜你喜欢
环球时报(2022-05-05)2022-05-05
电气化铁道(2022年2期)2022-04-25
科技创新导报(2021年33期)2021-04-17
兵器知识(2020年11期)2020-11-18
兵器知识(2019年1期)2019-01-23
小猕猴智力画刊(2018年7期)2018-08-08
小学生作文选刊·低年级版(2017年4期)2017-06-07
现代兵器(2016年12期)2016-12-22
南风窗(2015年11期)2015-09-10
