
奶茶自动检测机构的变胞设计
2019-01-08 08:37张明镇王聪林泽辉邓耀森吴黄懿
数字技术与应用 2019年10期
张明镇 王聪 林泽辉 邓耀森 吴黄懿


摘要:变胞机构自提出以来,在机器人等工业设计领域,获得了很多好的效果。本文尝试将变胞机构应用于食品检测机械领域,针对奶茶自动检测机旋转检测机构进行变胞设计,对奶茶自动检测机旋转检测机构进行了矩阵分析,并以机构加速度变化为标的,分析构型前后的机构特性,为今后进行类似产品的设计打下基础。
关键词:奶茶检测;变胞设计;自动检测机构
中图分类号:TP23 文献标识码:A 文章编号:1007-9416(2019)10-0005-03
0 引言
文献[1]根据细胞的分裂再生现象提出了变胞机构,通过改变拓扑结构适因性以提升系统的运动特性,使得系统适应工况环境的特点,在动作的过程中改变机构自身的适应性。变胞机构的设想自提出以后,受到了许多学者的关注,并进行了大量的研究分析。文献[2]将约束图方法运用到变胞机构的设计中,提出几何约束图形方法更适因变胞机构的分析。文献[3]利用矩阵论原理设关联了设计参数和设计变量矩阵,通过逻辑计算的方法对机构构态进行公理设计。在机构应用方面文献[4]研制了一种自动包角机构,使变胞机构应用拓展到了自动包装领域。文献[5]研发制作了垫块放置结构,提升了爬行动态特性和运动能力,使得变胞机构的应用拓展到了工业生产领域。此外,在机器人等其他工业领域,变胞机构的应用亦广泛涉足,文献[6-10]阐述了各种应用与设计。然而,在食品自动检测方面,变胞机构的应用还不多,特别是关于食品检测机械的变胞设计方面还是较少的。
本文以奶茶自动检测机旋转检测机构为研究分析对象,利用变胞机构自适应好的特点,得到旋转检测机构的特性参数,为今后进行类似产品的设计打下基础。
1 奶茶自动检测旋转检测机构
图1为奶茶自动检测机构结构图,该结构将盛有被测奶茶液体的测试杯放在传送带1上,电机传动组感应到后带动传送带使测试杯运输至检测装置中,打码器进行标记后进行检测,到检测位会停留数分钟后出结果,检测结果将显示于显示屏上,由WIFI传输装置将结果传输至APP上。警示器是检测到反式脂肪酸、甜蜜素含量等超标会闪烁。测试杯在检测装置内的自动清洗装置清洗后从传送带2送出,其中的旋转检测机构是这个系统不可或缺的部分,本文将针对该机构进行变胞设计,提升系统的检查稳定性和操作便捷性。
2 变胞机构的矩阵解析
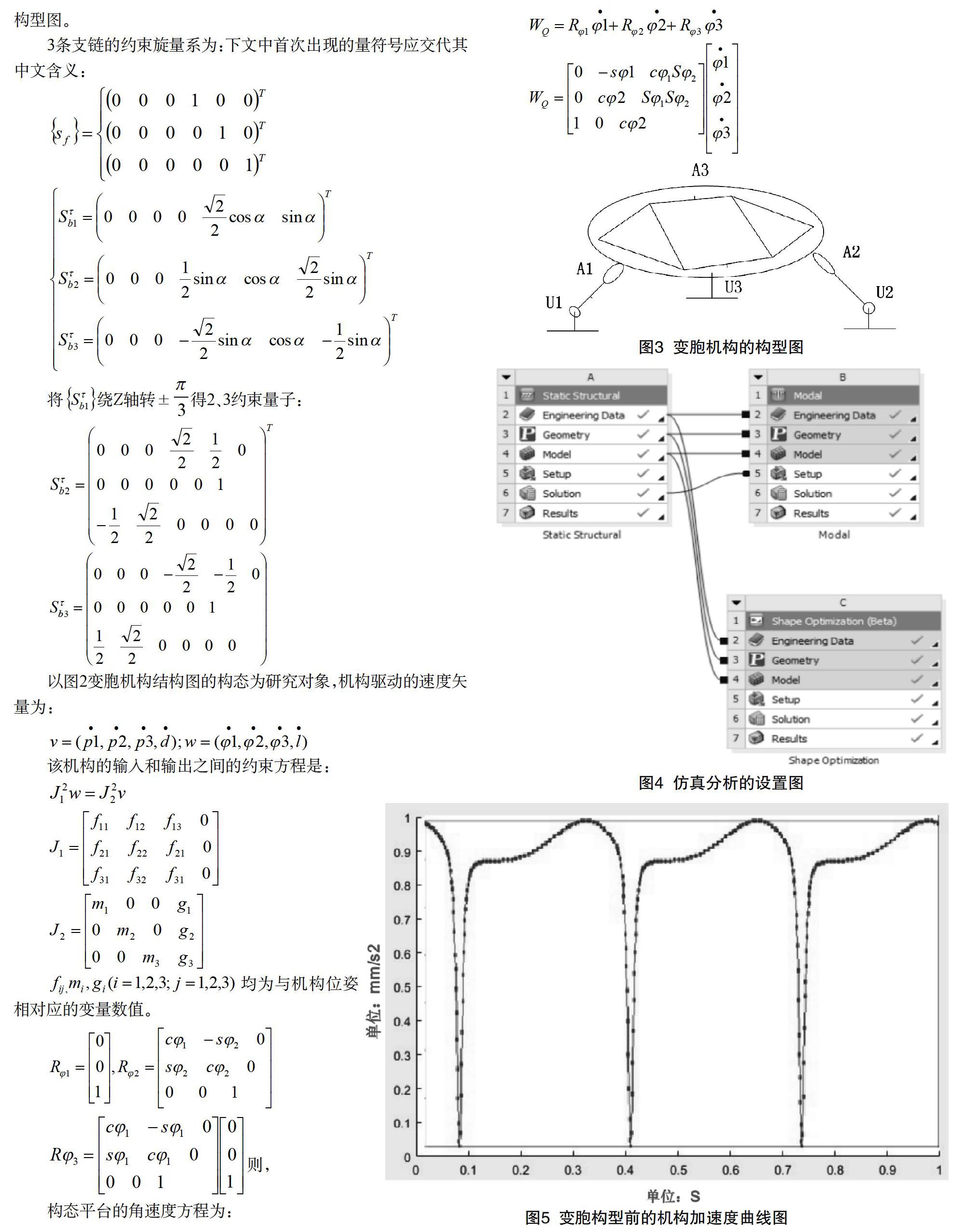
为了方便对机构进行分析,先对机构模型(图2所示)进行简化。由于构态变转机构是调整相关运动付的相应特征,且运动支链与平台铰接不通顺、含义不清?α为俯仰角,β为偏转角,建立图3所示的构型图。
3 机构性能的仿真分析
图4为机构在软件中机械机构动力学设置图,完成了仿真分析设置。如图5所示,变胞构型前,机构在一个周期内的加速度变化数据,机构的加速度出现周期性突变,驱动不是很平稳。如图6所示,经过变胞构型后,机构在一个周期内的加速度变化数据,机构的加速度出现周期性平顺,驱动比较稳定,机构变胞设计达到预期的设计要求。
4 结论
根据上述分析可得出奶茶自动检测机旋转检测机构的设计得出以下结论:
(1)完成了奶茶自动检测机旋转检测机构进行拓扑机构设计;(2)完成了奶茶自动检测机旋转检测机构的构型矩阵解析,达到预期设计效果。
参考文献
[1] Dai JS,Rees Jones J.Mobility in Metamorphic Mechanisms of Foldable/Erectable Kinds[J].Journal of Mechanical Design,1999(121):375-82.
[2] Ding X,Yang Y,Dai JS.Topology and kinematic analysis of color-changing ball[J].MeMaT,2011(46):67-81.
[3] Zhang W,Ding X,Liu J.A representation of the configurations and evolution of metamorphic mechanisms[J].Mechanical Sciences,2016(7):39-47.
[4] 郭曉宁,张敏.一种变胞式作角机构设计[J].机械设计与研究,2014,30(4):21-23.
[5] 王延祥,杨先海,潘广堂.具有变胞功能的垫块安放机构的构态分析[J].机械设计与研究,2017,33(4):52-57.
[6] 李宪芝,张亚杰,冯晓明,等.一种新型变胞装载机械手的设计[J].机械研究与应用,2016,6(29):135-138.
[7] 刘江南,张文博.基于运动副变胞实现的变胞机构构型综合[J].华南理工大学学报(自然科学版),2017,45(9):19-25.
[8] 王汝贵,陈辉庆,戴建生.新型可控变胞式码垛机器人机构动态稳定性研究[J].机械工程学报,2017,53(13):39-47.
[9] 李小彭,高建卓,李加胜,等.参数变化对约束变胞机构构态变换随机性的影响[J].中南大学学报(自然科学版),2017,48(6):1499-1504.
[10] 李树军,王洪光,李小彭,等.面向作业任务的约束变胞机构设计方法[J].机械工程学报,2018,54(3):26-35.
