
基于序列检测的行人导航航向误差修正算法研究
2019-01-10 01:48郑佳瑶苏中李擎
现代电子技术 2019年1期
郑佳瑶 苏中 李擎
关键词: 行人导航; 自主定位; 航向发散; 步态约束; 序列检测; 航向约束
中图分类号: TN96?34; TP391 文献标识码: A 文章编号: 1004?373X(2019)01?0157?04
Abstract: Since the MEMS inertial device for pedestrian autonomous positioning has drift error caused by the accumulation of time, which would lead to heading divergence, a sequence detection method with gait constraints (turning angle is 0°, 90° or 180°) is proposed. The gait sequence template is obtained by training the different walking behavior data of pedestrians. According to the heading constraints of matched templates, the heading drift error is corrected in real time. The 500 m walking experiments are carried out in the corridor with indoor structure regularization to verify the effectiveness of the algorithm. The experimental results show that the proposed method can effectively suppress the heading divergence of pedestrian navigation, and the positioning error is about 0.7% of the total distance.
Keywords: pedestrian navigation; autonomous positioning; heading divergence; gait constraint; sequence detection; heading constraint
0 引 言
基于低成本的MEMS?IMU导航系统已广泛应用于室内自主定位中,然而MEMS惯性器件存在随时间累积的漂移误差导致航向发散的问题,使定位精度越来越低。为了解决这一问题,国内外研究人员[1]借助一些附加信息提出建筑物信息融合算法、磁航向辅助算法等方法,但这些附加信息增加了系统的复杂度,易受客观条件的干扰,容易影响导航系统的应用效果。Foxlin提出基于鞋式行人导航的零速修正技术,利用行人行走过程中脚接触地面瞬间速度为零的事实,并结合卡尔曼滤波的方法修正导航系统的速度、位置和水平姿态误差,但是由于航向误差可观测性差[2],该方法在行人自主定位的过程中仍存在航向发散现象。文献[3]利用大多数人构造建筑室内结构规则化的事实,提出一种基于主方向的启发式漂移消除算法(HDE),通过直接修正陀螺仪积分得到的航向角来抑制航向发散,但是该方法限制了行人在规则的室内环境中沿直线行走,当行人转弯时无法修正航向[4],并且陀螺仪积分计算角度的过程仍会引入一系列的累积误差。文献[5]在HDE方法的基础上进行了改进,称为iHDE,满足了行人转弯时继续航向的修正,后来将磁场统计信息集成到iHDE中,获得了更好的定位解决方案,该方法称为MiHDE[6]。

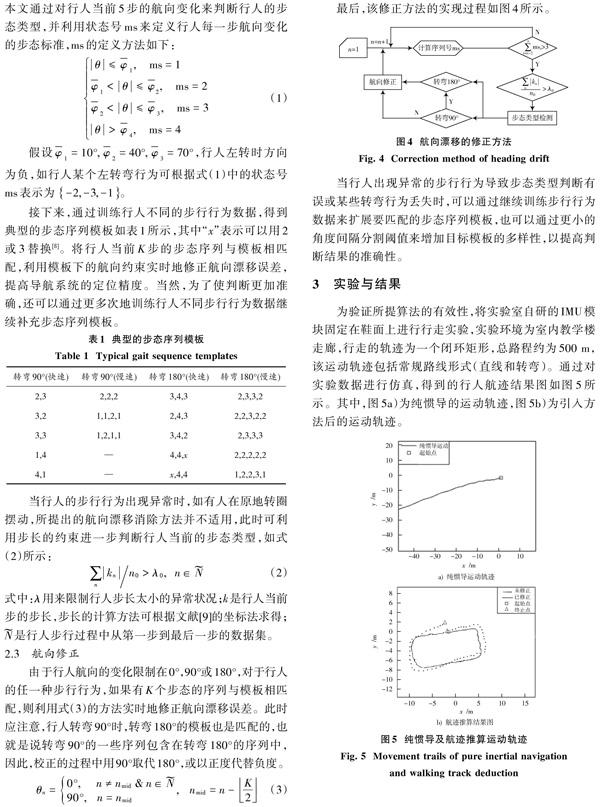
从图5a)可以看出,由于惯性器件随时间累积的漂移误差较大,行人在行走的过程中只能得到行人起始点的航位信息,无法得到行人终止点的航位信息,这说明行人的航迹是发散的,无法真实地反映出行人的运动情况,失去了定位的意义。
图5b)为在纯惯导的基础上引入适当的方法来抑制航向发散得到的航迹信息,起始点和终止点的位置均已给出。其中,虚线为INS+EKF+ZUPT方法得到的轨迹,ZUPT虽然能修正系统误差,但由于航向误差的可观测性差,系统仍存在航向发散的现象,使得行人的航迹与真实的轨迹存在偏差;实线为在INS+EKF+ZUPT方法上引入了本文所提出的基于序列检测的模板匹配法得到的运动轨迹,利用转弯时的航向约束(转弯0°,90°或180°)信息,有效地抑制了惯性器件的漂移误差,从而得到与实际轨迹基本吻合的航迹信息,通过对起始点与终点的误差分析,得到定位精度约为0.7%,可以反映出行人的真实运动情况。
4 结 语
针对MEMS惯性器件随时间累积的零漂误差大及航向误差可观测性差,ZUPT无法修正航向,使得导航系统仍存在航向发散的问题,本文提出一种基于序列检测的模板匹配法实时地消除航向漂移误差。首先基于室内结构规则化的事实将行人在室内行走时的航向变化限制在0°,90°或180°,然后通过训练行人第1~5步常见的步行行为(如直线、左转、右转、左后转、右后转)数据得到典型的步态序列模板,根据行人当前的步态序列匹配相应的序列模板,利用模板下的航向约束(转弯0°,90°或180°)实时地消除航向漂移误差,最后利用EKF融合系统的误差,进一步提高导航定位的精度。最终通过仿真实验验证了本文所提算法能有效地抑制航向发散,证明了所提算法的有效性和准确性。为了更好地验证本文所提方法的有效性,今后将在更复杂的室内环境中进行行走实验,并在该方法的基础上融入地图或超宽带UWB等定位信息,进一步提高导航定位的精度。
参考文献
[1] 谢波,江一夫,严恭敏,等.个人导航融合建筑平面信息的粒子滤波方法[J].中国惯性技术学报,2013,21(1):1?6.
XIE Bo, JIANG Yifu, YAN Gongmin, et al. Particle filter method for building plane information fusion in personal navigation [J]. Chinese journal of inertial technology, 2013, 21(1): 1?6.
[2] JIM?NEZ A R, SECO F, PRIETO J C, et al. Indoor pedes?trian navigation using an INS/EKF framework for yaw drift reduction and a foot?mounted IMU [C]// 2010 IEEE the 7th Workshop on Positioning Navigation and Communication. Dresden: IEEE, 2010: 135?143.
[3] BORENSTEIN J, OJEDA L, KWANMUANG S. Heuristic reduction of gyro drift in IMU?based personnel tracking systems [J]. Journal of navigation, 2009, 62(1): 41?58.
[4] 楼喜中,周乐宇,叶敏展,等.基于角度的HDE算法在室内行人航迹定位中的研究[J].传感技术学报,2015,15(4):598?602.
LOU Xizhong, ZHOU Leyu, YE Minzhan, et al. Research on indoor pedestrian track location using angle?based HDE algorithm [J]. Chinese journal of sensors and actuators, 2015, 15(4): 598?602.
[5] JIMENEZ A R, SECO F, ZAMPELLA F, et al. Improved heuristic drift elimination (iHDE) for pedestrian navigation in complex buildings [C]// 2011 IEEE International Conference on Indoor Positioning and Indoor Navigation. Guimaraes, Portugal: IEEE, 2011: 1?8.
[6] JIMENEZ A R, SECO F, ZAMPELLA F, et al. Improved heuristic drift elimination with magnetically?aided dominant directions (MiHDE) for pedestrian navigation in complex buildings [J]. Journal of location based services, 2012(6): 186?210.
[7] 李超,苏中,朱嘉林,等.可穿戴式自主定位技术的零速触发算法研究[J].传感技术学报,2014,27(5):627?632.
LI Chao, SU Zhong, ZHU Jialin, et al. Zero?speed triggering algorithm for wearable autonomous positioning technology [J]. Chinese journal of sensors and actuators, 2014, 27(5): 627?632.
[8] JU H J, LEE M S, PARK C G, et al. Advanced heuristic drift elimination for indoor pedestrian navigation [C]// 2014 IEEE International Conference on Indoor Positioning and Indoor Navigation. Busan: IEEE, 2014: 729?732.
[9] LI Y, SONG Q, MA M, et al. Near real time heading drift correction for indoor pedestrian tracking based on sequence detection [C]// 2016 IEEE International Conference on Indoor Positioning and Indoor Navigation. Alcala de Henares: IEEE, 2016: 1?4.
[10] ZHANG X, RONG Z, GUO M F, et al. Yaw error self?observation algorithm for pedestrian navigation via foot?mounted inertial navigation system [J]. Journal of Chinese inertial technology, 2015, 23(4): 457?466.
