
利用GNSS数据检测CORS的综合性能
2019-01-15 03:04詹达诲谢宝飞范潇云叶文芳王一飞
数字通信世界 2018年12期
詹达诲,杜 昊,谢宝飞,范潇云,叶文芳,王一飞
(1.国家无线电监测中心检测中心,北京 100041;2.武汉大学,武汉 430079)
全球导航卫星系统(GNSS)指的是由美国GPS、俄罗斯GLONASS、中国北斗以及欧洲Galileo四大卫星导航系统组成的全球导航卫星系统[1]。CORS(Continuously Operating Reference System),即连续运行参考系统可以理解为一种以提供卫星导航定位服务为主的多功能GNSS服务系统,是建立数字城市、国家乃至地球时不可缺少的基础设施,其实质是一种多功能的连续运行的GNSS综合服务系统[2-3]。随着城市化建设的不断加快和推进,CORS服务系统在人民生活和国防建设之中扮演着愈来愈重要角色,使得用户对CORS服务系统的性能要求不断提高,这引起测绘界的广泛关注[3]。本文通过使用天宝GNSS接收机进行在JLCORS服务系统下的一般GNSS接收机性能检验和静态定位测试、动态定位测试及内、外符合精度测试等综合性能来评估JLCORS服务系统的整体性能[4]。
1 JLCORS系统简介
吉林省连续运行参考站系统(Jilin Continuously Operat ing Reference System,JLCORS)是于2009年11月吉林省人民政府正式批准立项建设的,由吉林省测绘地理信息局领头组织,与吉林省气象局、吉林省地震局共同建设完成,在2011年底开通进入试运行阶段[5]。吉林省连续运行参考站(JLCORS)系统作为新一代的网络化大地测量系统,它不仅可以向各级测绘用户提供高精度、连续的时间和空间基准,也可以向气象监测、实时导航定位、灾害预报等部门提供各种数据服务,同时也是建设数字化吉林的基础设施之一[6]。JLCORS包括基准站网络、控制中心、数据中心、用户应用系统、数字通信系统5个子系统以及49个参考站(参考站具体点位分布如图1),实现可覆盖吉林省90% 地区[5]。
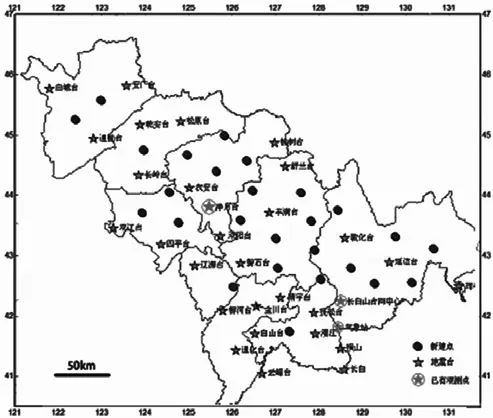
图1 JLCORS参考站的点位分布图[7]
2 JLCORS服务系统的整体性能检验
到目前为止,对于CORS系统的测试指标在国际上还没有一个明确的指标[3],为了准确地评价CORS系统的综合性能、定位精度、可靠性、稳定性等指标,本次研究通过在吉大校区内的4个控制点进行相关测量并从以下4个方面来测试CORS系统的整体性能:定位服务时效性检测、静态定位精度检测、动态定位精度检测、内外符合精度检测等[4]。
2.1 GNSS接收机定位服务时效性检测
在GNSS接收机定位服务时效性检测之中,主要包括初始化时间、PDOP值、卫星个数、水平精度、垂直精度等信息。
(1)初始化时间:对于RTK测量而言,用户在获得JLCORS系统差分数据服务后可能够很快得到该测站的浮动解,但是需要一定时间的观测才能得到符合定位精度要求的固定解,我们将获得浮动解到获取到固定解的时间间隔称为初始化时间[4]。
(2)PDOP:指空间位置精度因子

(3)卫星个数:指GNSS接收机所接收到卫星信号的卫星的个数,一般至少应大于4颗,最好大于6颗(本次实验每次观测都大于6颗)。
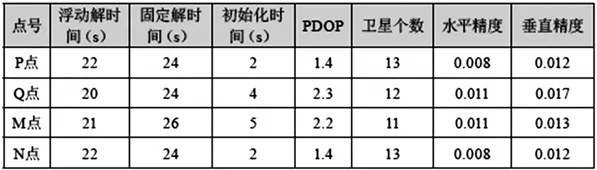
表1 JLCORS定位服务时效性测试表
通过测试发现能在很短的时间内对现有已知点都进行初始化,并成功和JLCORS在短时间内连接,用户RTK网络连接也无故障出现,同时PDOP、卫星个数及其他消息也满足要求,说明JLCORS系统的定位服务时效性良好。
2.2 静态相对定位测试
静态相对定位指的是根据安置在固定待定点和基准点上GNSS接收机所进行同步观测的资料来确定待定点相对于基准点的坐标位置或再根据相对定位原理利用已知的基准点坐标来确定固定待定点的坐标的测量方式。其观测值可以使用伪距观测值也可以使用载波相位观测值,由于经过周跳修复并确定了整周模糊度的载波相位观测值可以看作为高精度的测距码伪距观测值,因此本文仅考虑载波相位观测值得情况。
2.2.1 基本原理
(1)非差观测值

(2)单差观测值

(3)双差观测值

2.2.2 具体操作
在静态作业条件下,通过RTK进行定位测量,利用JLCORS系统播发的网络RTK改正信息,确定静态定位精度。具体操作是在4个已知坐标的点上进行静态单点定位测试,通过根据不同时长得到的点位坐标与已知坐标比较,来判断静态单点定位精度。其中P点定位时间为5min,Q定位时间为10min,M定位时间为15min,N点为20min,具体测量结果见表2。

表2 静态单点定位测试表(单位:cm)
从表2中可以看出,静态相对定位随着时间的增加其精度也增加,最后趋于稳定。
2.3 动态相对定位(盲区测试)测试
2.3.1 基本概念
动态相对定位指的是根据安置在运动载体和基准点上GNSS接收机所进行同步观测的资料来确定运动载体上的GNSS接收机(待定点)相对于基准点的坐标位置或再根据相对定位原理利用已知的基准点坐标来确定移动的待定点的坐标的测量方式。其观测值与静态相对定位一样可以是伪距观测值或是载波相位观测值,其观测原理及方程与静态相对定位一致,在这就不再反复说明。
2.3.2 具体操作
动态精度测试指的是在JLCORS系统下接收机接收到信号的强弱和定位服务的范围,是否存在测量盲区,以及在测量过程中是否出现信号的丢失和重连情况等。通过动态定位测试来评定JLCORS系统覆盖是否健康,间接评判JLCORS系统的综合性能。本次研究是将CORS-RTK调节到连续地形测量模式下,每10秒观测一次,匀速围绕整个测区走一圈实时定位测量,以点位的疏密程度来判断JLCORS在测区内的服务强度及定位范围(如图2、图3所示)。
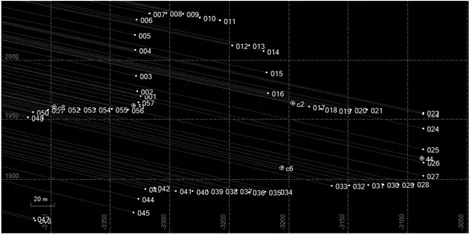
图2 动态相对定位测试(未插底图)

图3 动态相对定位测试(含CAD底图)
通过测试发现,测区内主干道路信号稳定、PDOP数值小、垂直精度与水平精度都较低,卫星数也都基本大于等于6颗,只有特别靠近水工楼后边和其侧边等阻挡物过多且过高地方会发生PDOP数值过大,测量被中断。由此说明,JLCORS系统的服务性较好,覆盖率也接近90%,满足厘米级别的测量。
2.4 内、外符合精度测试
2.4.1 基本概念
内部符合精度反映的是观测数据本身的质量好坏,而外部符合精度反映的则是该GNSS数据在实际测量中的质量[8]。
2.4.2 基本原理
(1)内部符合精度:首先计算各个测站点上观测值的平均值,再与每个观测值求差,即可得到各测点的内部符合精度情况。
(2)外部符合精度:将GNSS-RTK作业的观测值与其相应的已知值进行比较,就可以出各点的外符合精度。
首先,计算测量的偏离值:

其次,计算外部符合精度:

最后,计算点位精度:
2.4.3 具体操作
通过观察测区内已知的4个点P、Q、M、N获得静态观测数据,对测试点的内外符合精度做评定,最后得到4个测点的内、外符合精度(如表3所示)。
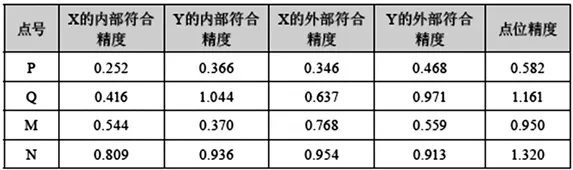
表3 内外符合精度测试表(单位:±m)
由表3可知,测区内4个点的内、外分部符合精度及点位精度都较好,反映出JLCORS服务系统的综合性能较好。
3 结束语
通过利用GNSS接收机在JLCORS系统中的定位服务时效性测试和对测区内的4个控制点进行静态相对定位测试、动态相对定位测试及静态定位内、外符合精度的计算的数据来检验JLCORS系统的整体性能。从点位精度可以达到1.500m,可以得出JLCORS系统的整体性能较好,由此可以判断使用GNSS数据来检验CORS系统的可行性。
猜你喜欢
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
山东工业技术(2017年24期)2017-12-29
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
专用汽车(2015年1期)2015-03-01
