
混联式汽车电泳涂装输送机构的时延估计自适应滑模控制*
2019-01-29 06:46高国琴周辉辉方志明
汽车工程 2018年12期
高国琴,周辉辉,方志明
(江苏大学电气信息工程学院,镇江 212013)
前言
现有汽车电泳涂装输送系统如RoDip输送机和多功能穿梭机等都是悬臂梁串联结构,存在承载能力和灵活性较差等缺陷[1]。混联机构是将串并联机构合理结合应用的一类机械结构,具有刚度高、承载能力大和动态特性好的优点,能实现多自由度、多模式运动[2-3]。因此,本文中基于混联机构研制了一种新型混联式汽车电泳涂装输送机构。但该机构系统是一种强非线性、强耦合的多输入多输出复杂系统,对该机构的控制存在以下问题:首先,该机构的闭链结构和运动学约束导致机构动力学模型较为复杂[4],传统的建模方法难以建立既能全面反映其动力学特性、又能实现实时控制的数学模型;此外,该系统存在多种复杂的不确定性因素,如耦合动力学影响、摩擦和外界干扰等,使机构的高性能控制难以实现。因此有必要从建模方法和解决系统不确定性问题方面研究提高该输送机构的控制性能。
针对传统建模方法如拉格朗日法与牛顿 欧拉法等难以建立既能全面反映动力学特性、又能实现实时控制的新型混联式输送机构数学模型问题,本文中引入时延估计技术[5]实时在线获取系统模型,该模型包含混联机构系统未知动力学、摩擦和外界干扰等不确定因素。时延估计方法不需要复杂被控对象如机器人、混联机构等的动力学模型,避免了其逆动力学的在线实时计算[6],但存在时延估计误差。该误差是与状态有关的非线性项,其大小影响系统的鲁棒性[7]。
本文中针对混联机构系统存在不确定性和采用时延估计技术估计机构未知动力学存在时延估计误差的问题,引入滑模控制策略。滑模控制具有响应快速、对外界干扰和系统参数变化不敏感、无需系统在线辨识和物理实现简单等优点[8]。但滑模控制系统为确保其稳定性和鲁棒性,要求滑模控制切换增益的选择需大于不确定性的上界[9],然而在实际工程中,由于上界未知,因此切换增益的选择要求尽可能大,以覆盖大范围的不确定性。但过大的切换增益会使滑模控制产生抖振,从而减弱其控制效果。对于滑模控制的抖振问题,目前已有解决方法,主要有边界层设置法[10]、低通滤波法[11]和高阶滑模控制方法[12]等。但是这些方法仍然需要不确定系统的上界信息,所以仍然存在鲁棒性和抖振的矛盾。与上述解决抖振的方法相比,自适应滑模控制不仅能够很好地抑制抖振,且其自适应增益的调整与不确定系统的上界无关,目前自适应滑模控制的研究已引起人们关注。文献[13]中考虑系统非结构化的上界,提出一种当上界未知和上界非结构化时的自适应滑模控制方案,但由于滑模面附近切换增益变化缓慢,所以仍然会产生较大抖振。文献[14]中设计了一种鲁棒自适应终端滑模控制方案,将边界层的概念用以减小抖振,但这种方法会降低系统的跟踪性能。分析可知,上述自适应滑模控制方案难以保证系统在跟踪性能好的同时减小抖振。为解决上述问题,引入一种新型自适应规则,该规则不仅能自适应调整滑模切换增益的大小,且能自适应调整滑模切换增益的调整速度,从而在系统具有较好跟踪性能的同时有效减弱滑模控制的抖振。即当滑动变量远离滑模面时,切换增益的导数与滑动变量到滑模面的距离成正比,从而能快速适应滑模切换增益的调整和快速收敛到滑模面,以提高系统的跟踪性能。另外,一旦滑动变量接近滑模面,切换增益的导数将与滑动变量到滑模面的距离成反比从而减小抖振。
综上所述,针对新型混联式汽车电泳涂装输送机构,提出一种时延估计自适应滑模控制方法,以解决传统建模方法难以建立实时的、精确的数学模型问题,以及在无需不确定系统上界信息的条件下,解决系统中存在的不确定性和滑模控制存在的抖振问题,从而提高系统的跟踪性能。
1 输送机构动力学模型
所研制的新型混联式汽车电泳涂装输送机构结构图如图1所示。该混联机构由行走机构与升降翻转机构两个相对独立的部分组成。其中,升降翻转机构作为输送机构的主体,对输送机构的性能影响较大,控制要求较高,为此,着重研究升降翻转机构。此外,在该机构中,两组对称并联式升降翻转机构间通过连接杆相连,连接杆上安放车体固定架及待涂装输送的白车身。因此本文中以连接杆中点的运动作为新型输送机构的运动。
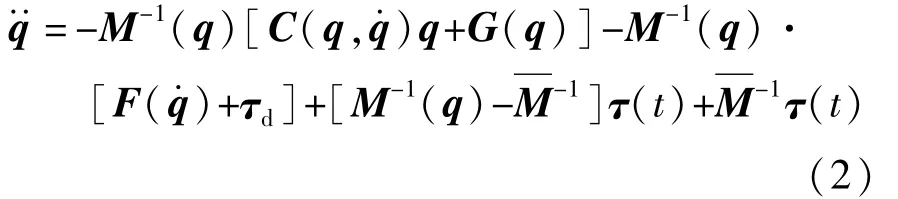
对于多输入多输出的新型混联式汽车电泳涂装输送机构,其动力学方程[9]为

式中:q=(z,β)T为连接杆中点的位移;q·,q··为连接杆中点的速度和加速度;M(q)为对称正定的惯性矩阵;C(q)为哥氏力和离心力项;G(q)为重力项;F()为摩擦力项;为外界干扰项;τ为控制力矩向量。
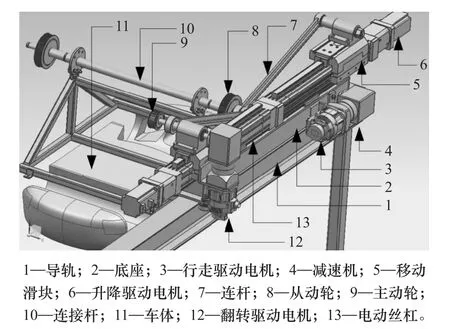
图1 新型混联式汽车电泳涂装输送机构结构图
基于拉格朗日法、凯恩法等方法求解混联机构的动力学方程过程十分复杂,且难以建立既能全面反映动力学特性、又能实现实时控制的数学模型。据此,引入一个正定常数矩阵M,并对式(1)两边同时乘以M-1(q)以求出·q·:

则式(1)混联机构的动力学方程可简化为

如果能简化Γ(t)的计算或能实时估计出其大小,则式(3)的计算相当简单。时延估计技术就是将 Γ(t)的样本采样值 ~Γ(t)=Γ(t-L)代入控制律中。Γ(t-L)为 Γ(t)的时延值,即 t-L时刻的值,t是当前时间,L是估计延迟时间,如果L足够小,则跟踪误差趋向于零。实际应用时,所能设置的最小L是采样周期,当采样频率大于系统带宽的30倍时,数字控制系统可视为连续系统,因而L的选择足以满足性能要求。
由于通过时延估计技术能够实时在线估计函数Γ(t)的大小,故能实时获取包含混联机构系统未知动力学、摩擦和外界干扰等不确定因素的系统模型。
2 时延估计自适应滑模控制器设计
基于通过时延估计获取的混联式汽车电泳涂装输送机构动力学模型,拟设计一种自适应滑模控制器,以解决系统中存在的各种复杂不确定性问题和滑模控制存在的抖振问题,提高系统的跟踪性能。时延估计自适应滑模控制器的设计目标是:确保整个闭环系统稳定;此外,保证新型输送机构实际运动位移q能准确、快速地跟踪其期望运动位移qd。
2.1 控制器设计
选取滑模面为
其中:e=qd-q;e·=q·d-q·;Ks=diag(Ks1,Ks2)
式中:Ks1,Ks2为满足霍尔伍兹稳定条件的可调参数;qd,q·d为连接杆中点的期望位移和速度向量;e,e·为连接杆中点的位移误差和速度误差向量。对式(4)中的S求导,并将e,e·代入得

由式(3)可得

取等速指数趋近律:

式中:β∈R,为正的可调参数;K为切换增益,且K=diag(K1(t),K2(t))。
将式(6)和式(7)代入式(5)整理可得

结合式(3)可得

将式(9)代入式(8)可得控制律为

为进一步提高系统跟踪性能,同时减小滑模控制抖振,设计滑模控制器切换增益具有如下自适应规则:
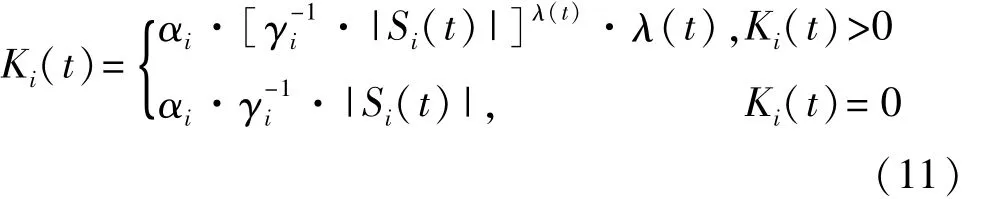
从式(11)可以看到,所设计自适应律无需使用不确定系统的上界信息。当 Ki(t)>0时,λ(t)的正负对应自适应律的两种形式如下。
(1)当 γ(t)>0,即‖S(t)‖∞>δ时,此时切换增益的导数为正,切换增益递增,直到‖S(t)‖∞<δ;此外,切换增益的导数与滑动变量到滑模面的距离成正比,从而能快速适应滑模切换增益的调整和快速收敛到滑模面,以提高系统的跟踪性能。
(2)当 λ(t)≤0,即‖S(t)‖∞≤δ时,切换增益的导数为负,切换增益Ki(t)递减;此外,滑模切换增益的导数与滑动变量到滑模面距离成反比,从而减小抖振。
因此,所引入的新型自适应规则能够使系统在具有较好跟踪性能的同时有效减弱滑模控制的抖振。所设计时延估计自适应滑模控制器原理框图如图2所示。
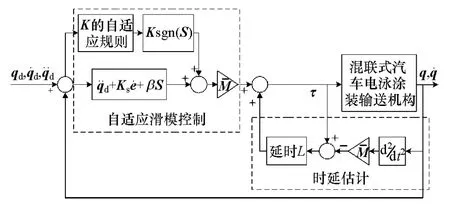
图2 时延估计自适应滑模控制器原理框图
2.2 稳定性证明

引理2:对于由式(10)和式(11)控制的混联机构,切换增益 Ki(t)具有上界[9]:Ki(t)<K*i,K*i为常数,t≥0。
证明:定义Lyapunov函数为

对式(13)求导可得

将式(4)和式(6)代入式(14)可得
将式(9)和式(10)代入式(15)中可得


式(18)表明滑动变量 S(t)在有限时间 tδ>0内到达滑模面的邻域中。

式(22)表明当 t≥tδ时,滑动变量 S(t)有界,且上界可通过参数αi,γi和δ来调节。
3 仿真结果与分析
为验证所设计时延估计自适应滑模控制算法的有效性,以包含未知动力学、摩擦力和外界干扰等集总扰动的混联式汽车电泳涂装输送机构动力学模型[16]为被控对象,分别对本文所设计的新型时延估计自适应滑模控制(NASMC+TDE)和未考虑滑模切换增益调整速度的自适应滑模控制(ASMC)在给定期望运动轨迹下进行MATLAB仿真。其中,混联机构的动力学模型为

上述动力学模型可转化为
为将连接杆中点的广义力转化为各个主动关节的驱动力,基于运动学分析得到雅可比矩阵:
式中各参数值如表1所示。为验证所设计控制器的鲁棒性能,仿真时加入集总扰动:
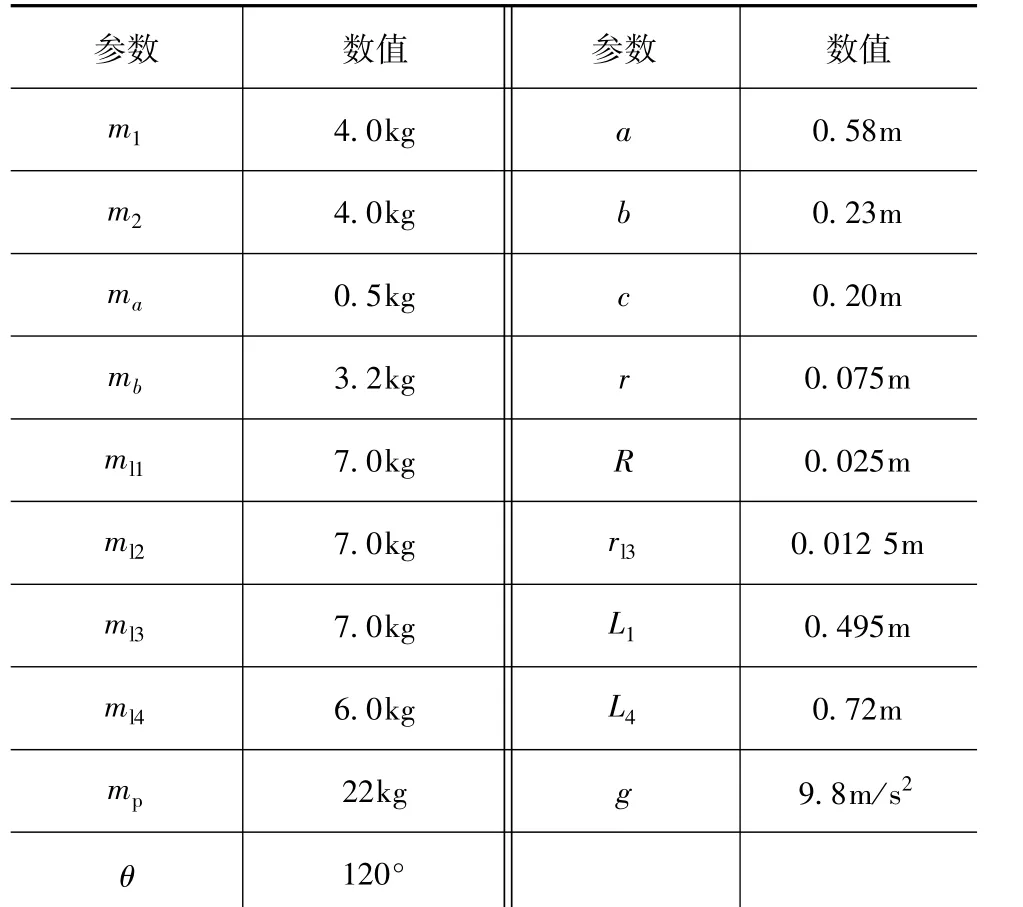
表1 机构参数

对升降翻转机构进行运动学分析[17]可知,连接杆中点在执行升降翻转运动时只存在z方向位移分量和β角度位移分量,此外,由于升降翻转机构两边对称,两边对应的关节运动一致,故只给出连接杆中点位移各分量和单边升降翻转机构各主动关节的仿真曲线。图3为连接杆中点位移各分量期望轨迹。图4为连接杆中点位移各分量轨迹跟踪误差曲线。图5为单边升降翻转机构3个主动关节的控制量变化曲线。
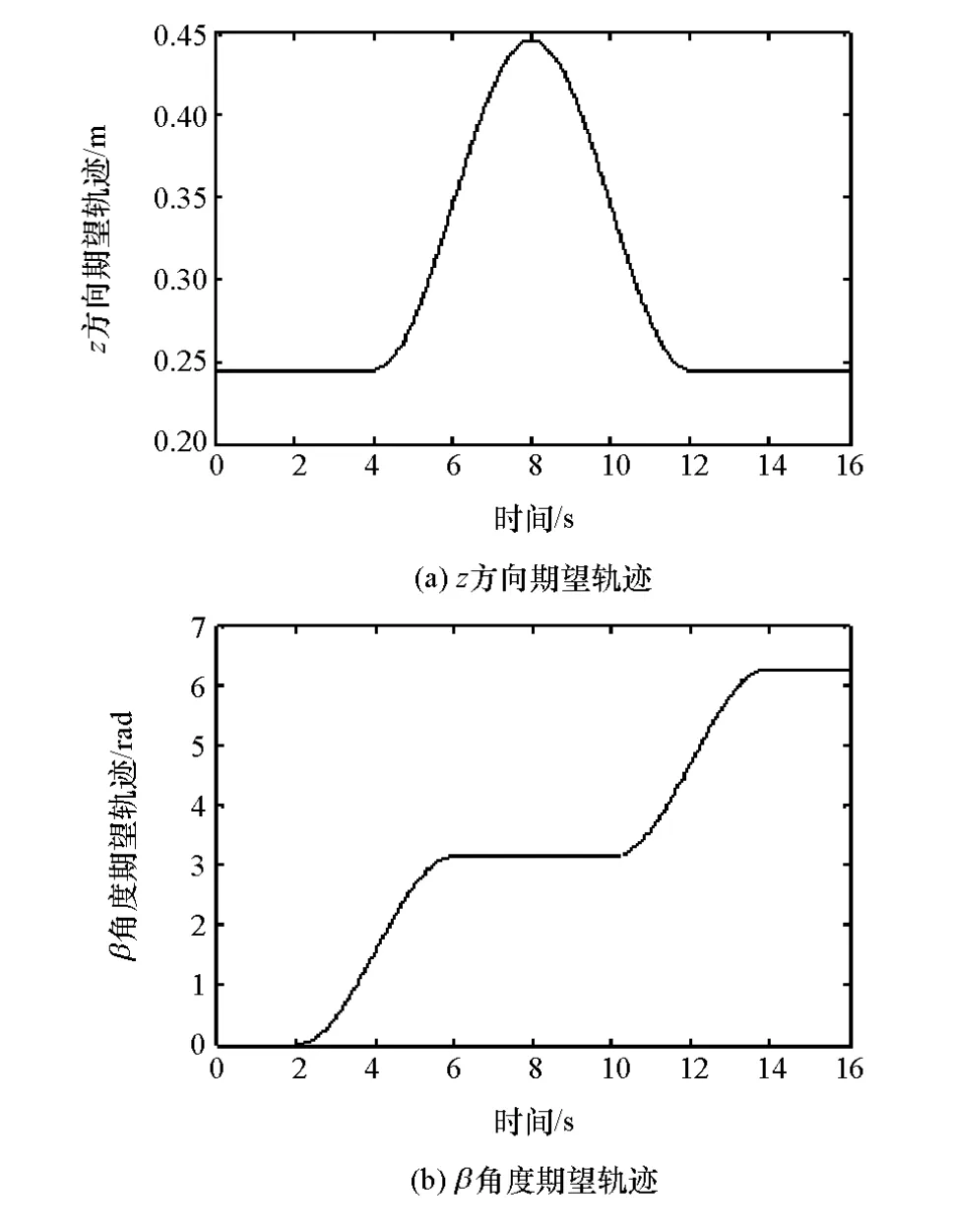
图3 连接杆中点位移各分量期望轨迹
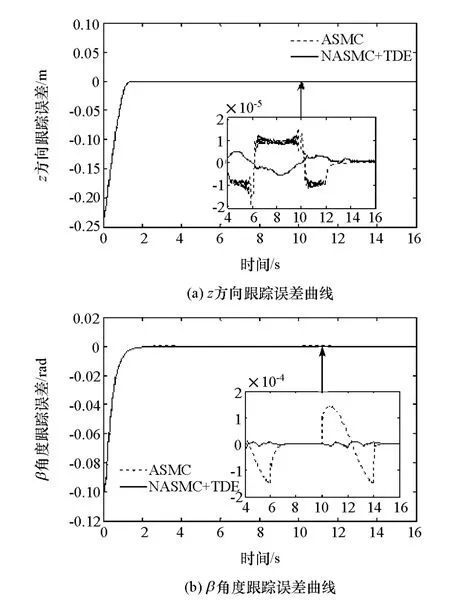
图4 连接杆中点位移各分量轨迹跟踪误差曲线
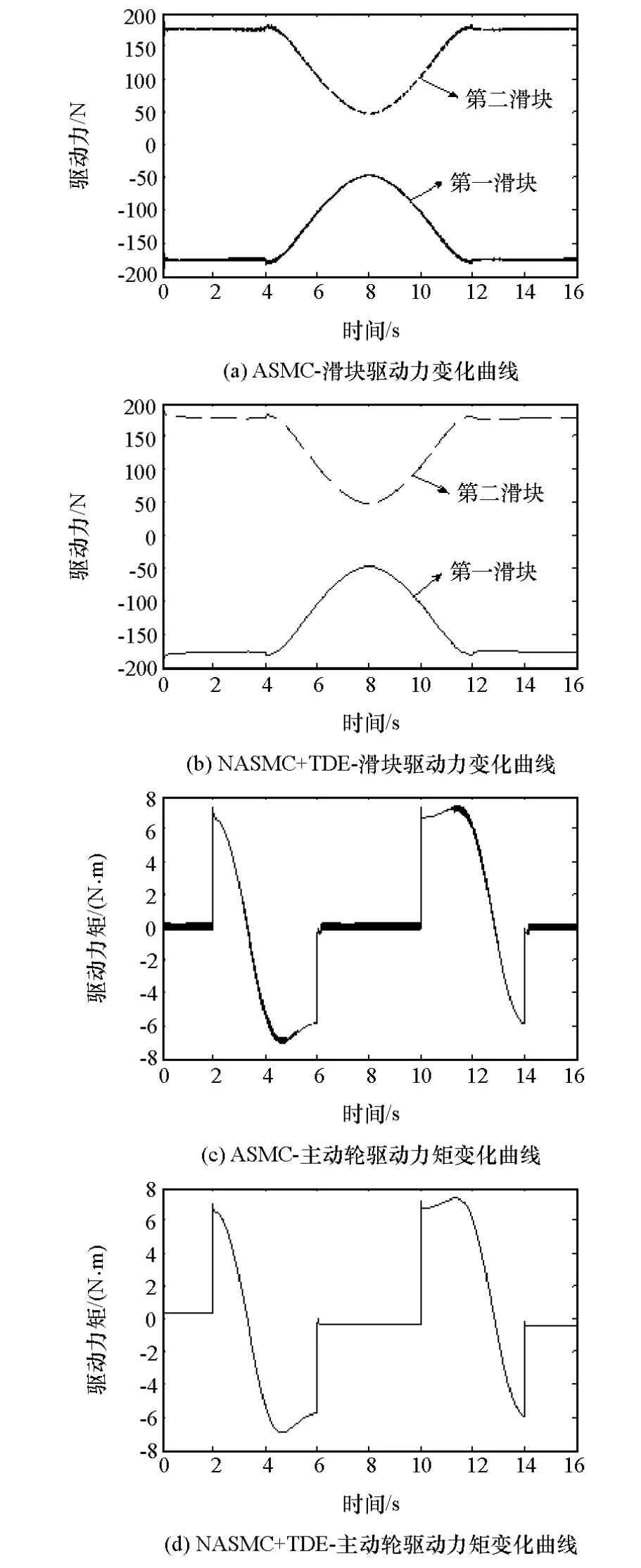
图5 单边升降翻转机构3个主动关节的控制量变化曲线
由图4可知,所设计的时延估计自适应滑模控制在z方向位移分量和β角度位移分量的轨迹跟踪误差明显小于未考虑滑模切换增益调整速度的自适应滑模控制在z方向位移分量和β角度位移分量的轨迹跟踪误差。这是由于与未考虑滑模切换增益调整速度的自适应滑模控制相比,时延估计自适应滑模控制在滑动变量远离滑模面时,切换增益的导数与滑动变量到滑模面的距离成正比,从而能快速适应滑模切换增益的调整和快速收敛到滑模面,从而提高系统的跟踪性能。
由图5可知,与未考虑滑模切换增益调整速度的自适应滑模控制相比,所设计的时延估计自适应滑模控制的控制输入量具有较小的抖振。这是由于时延估计自适应滑模控制在滑动变量接近滑模面时,其切换增益的导数与滑动变量到滑模面的距离成反比,从而能减小抖振。
此外,仿真时所采用的混联机构动力学模型加入了集总扰动等不确定项,且未提供系统不确定项上界信息,从仿真结果可以看出,所提出的时延估计自适应滑模控制在系统存在集总扰动的情况下仍然具有良好的控制性能,表明该控制方法在无需不确定系统上界信息的条件下能够有效解决系统中存在的不确定性问题。
综上所述,基于时延估计在线获取的系统模型所设计的自适应滑模控制算法在无需不确定系统上界信息的条件下有效地解决了系统中存在的复杂不确定性问题,且能在系统具有较好跟踪性能的同时有效减弱滑模控制抖振。
4 实验验证
为进一步验证所提出时延估计自适应滑模控制器的可行性与有效性,将该控制算法与未考虑滑模切换增益调整速度的自适应滑模控制应用于输送机构样机,分别进行运动控制实验。图6为新型混联式汽车电泳涂装输送机构样机系统。图7为连接杆中点位移各分量的跟踪误差实验结果。图8为单边升降翻转机构3个主动关节控制输入的实验结果。
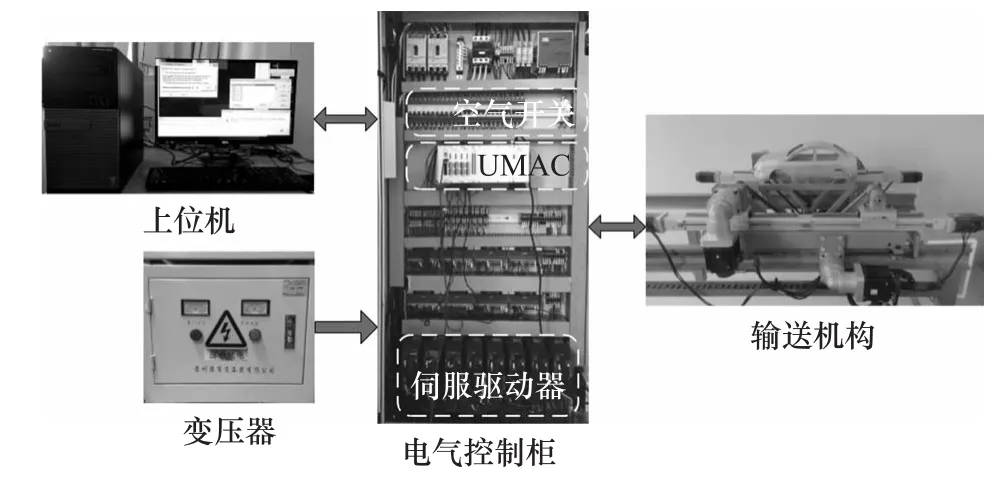
图6 混联式汽车电泳涂装输送机构样机系统
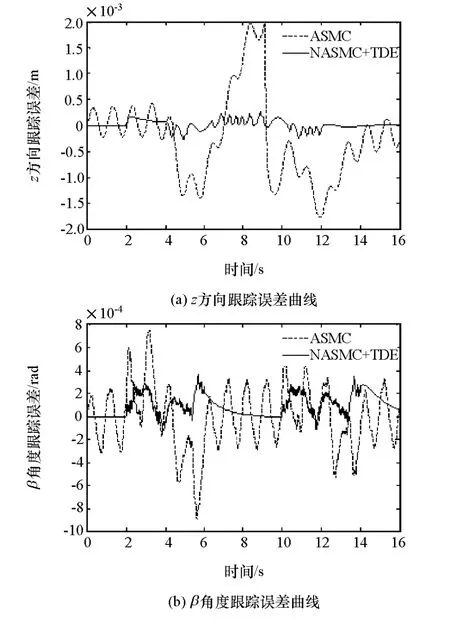
图7 连接杆中点位移各分量的跟踪误差实验结果
由图7可知,将未考虑滑模切换增益调整速度的自适应滑模控制应用于样机进行实验,得到连接杆中点在z方向的跟踪误差最大值为2.0×10-3m,转动角度β的跟踪误差最大值为7.0×10-4rad。将时延估计自适应滑模控制应用于样机进行实验,得到连接杆中点在z方向的跟踪误差最大值为1.5×10-4m,转动角度β的跟踪误差最大值为2.3×10-4rad。因此,与未考虑滑模切换增益调整速度的自适应滑模控制相比,采用时延估计自适应滑模控制时,机构样机的跟踪误差较小,实验结果进一步验证了时延估计自适应滑模控制能有效提高系统的跟踪性能。
由图8可知,将时延估计自适应滑模控制应用于机构样机进行实验得到控制量输入抖振明显小于将未考虑滑模切换增益调整速度的自适应滑模控制应用于样机进行实验得到的控制量输入抖振。实验结果进一步验证了时延估计自适应滑模控制具有减弱抖振的效果。
5 结论
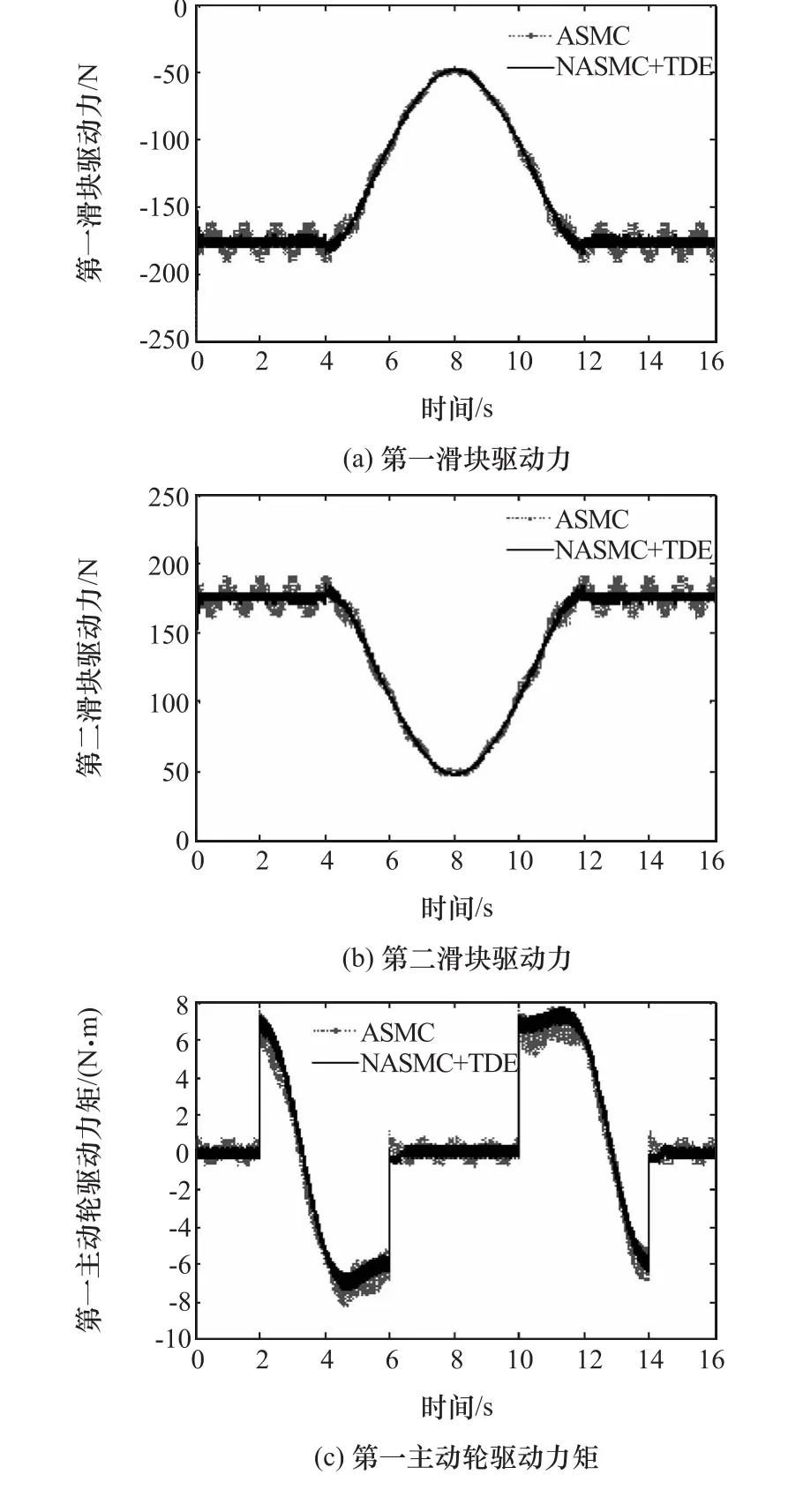
图8 单边升降翻转机构3个主动关节控制输入实验结果
(1)采用时延估计技术实时在线获取包含混联式汽车电泳涂装输送机构系统未知动力学、摩擦和外界干扰等不确定因素的系统模型。
(2)提出一种滑模控制算法以解决新型混联式汽车电泳涂装输送机构系统中存在的如耦合动力学、时变参数和外界干扰等不确定性因素以及时延估计误差问题,提高了系统的鲁棒性。
(3)设计了一种滑模控制切换增益的自适应规则,使系统在无需不确定系统上界信息的条件下具有较好跟踪性能的同时有效减弱滑模控制抖振。
(4)将所提出的时延估计自适应滑模控制与未考虑滑模切换增益调整速度的自适应滑模控制进行仿真和实验,结果验证了该方案能在不使用不确定系统上界信息的条件下使系统具有较好跟踪性能的同时有效减弱滑模控制抖振。
猜你喜欢
心理学报(2022年10期)2022-10-12
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年35期)2022-01-14
建材发展导向(2021年14期)2021-08-23
湖北大学学报(自然科学版)(2021年5期)2021-08-20
北京航空航天大学学报(2021年6期)2021-07-20
中学生数理化(高中版.高考数学)(2021年4期)2021-07-20
学苑创造·C版(2018年3期)2018-05-28
西江文艺(2017年15期)2017-09-10
