
基于差值整定参数的永磁同步电机解耦控制
2019-02-03 09:32睢丙东张慈航
科技风 2019年25期
关键词:永磁同步电机
睢丙东 张慈航
摘 要:针对永磁同步电机的矢量控制中励磁电流和转矩电流交叉耦合问题,采用前馈电压补偿的解耦控制策略。设计基于电流环PI调节器的差值整定电机参数模型,精确得出前馈电压补偿项,实现励磁电流和转矩电流在动态中的解耦控制,提高了电流的控制性能。仿真和实验结果验证方案的可行性。
关键词:永磁同步电机;解耦控制;矢量控制;差值整定参数
1 绪论
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有体积小、结构简单、转换效率高、运行稳定等优势,因此被广泛地应用于诸多场合。永磁同步电机是强耦合、非线性、变参数的复杂对象,解耦控制能实现对永磁同步电机高精度控制,提高永磁同步电机的运行性能。本文基于传统的矢量控制框架加入差值整定前馈电压补偿项的电流环PI调节器,提高了永磁同步电机控制系统的解耦性能。Matlab/Simulink的环境下搭建永磁同步电机控制系统进行仿真。
2 永磁同步电机的数学模型与矢量控制系统的设计
2.1 永磁同步电机的数学模型
在同步旋转坐标系下对永磁同步电机数学建模。为了简化分析,假设三相PMSM为理想电机,同步旋转坐标系d-q下永磁同步电机的定子电压方程为:
表贴式永磁同步电机的d-q轴电感分量相等关系式为:Lq=Ld=Ls。其中ud、uq、id、iq、Ld、Lq、ψd、ψq分别是定子电压、定子电流、电感、定子磁链的d-q轴分量;ψf是永磁体磁链;R是定子的电阻;ωe是电角速度。由式(1)可知,d-q轴之间存在交叉耦合的关系,而且交叉耦合项受ωe电角速度大小的影响,只要ωe≠0则耦合关系始终存在。
2.2 矢量控制系统
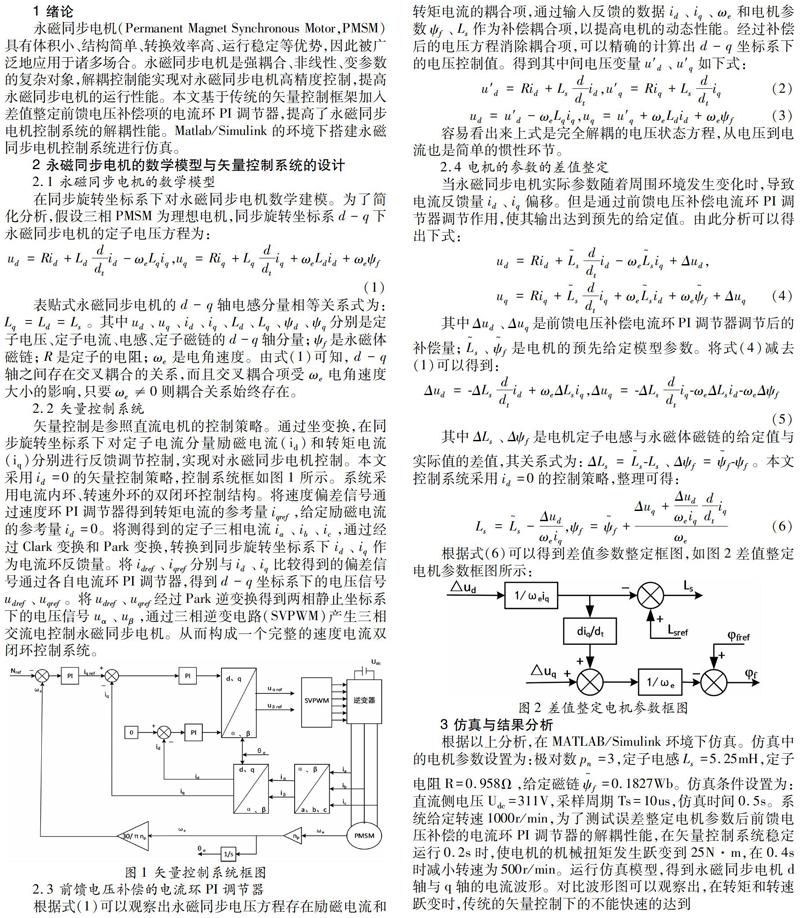
矢量控制是参照直流电机的控制策略。通过坐变换,在同步旋转坐标系下对定子电流分量励磁电流(id)和转矩电流(iq)分别进行反馈调节控制,实现对永磁同步电机控制。本文采用id=0的矢量控制策略,控制系统框如图1所示。系统采用电流内环、转速外环的双闭环控制结构。将速度偏差信号通过速度环PI调节器得到转矩电流的参考量iqref,给定励磁电流的参考量id=0。将测得到的定子三相电流ia、ib、ic,通过经过Clark变换和Park变换,转换到同步旋转坐标系下id、iq作为电流环反馈量。将idref、iqref分别与id、iq比较得到的偏差信号通过各自电流环PI调节器,得到d-q坐标系下的电压信号udref、uqref。将udref、uqref经过Park逆变换得到两相静止坐标系下的电压信号uα、uβ,通過三相逆变电路(SVPWM)产生三相交流电控制永磁同步电机。从而构成一个完整的速度电流双闭环控制系统。
2.3 前馈电压补偿的电流环PI调节器
根据式(1)可以观察出永磁同步电压方程存在励磁电流和转矩电流的耦合项,通过输入反馈的数据id、iq、ωe和电机参数ψf、Ls作为补偿耦合项,以提高电机的动态性能。经过补偿后的电压方程消除耦合项,可以精确的计算出d-q坐标系下的电压控制值。得到其中间电压变量u′d、u′q如下式:
容易看出来上式是完全解耦的电压状态方程,从电压到电流也是简单的惯性环节。
2.4 电机的参数的差值整定
当永磁同步电机实际参数随着周围环境发生变化时,导致电流反馈量id、iq偏移。但是通过前馈电压补偿电流环PI调节器调节作用,使其输出达到预先的给定值。由此分析可以得出下式:
根据式(6)可以得到差值参数整定框图,如图2差值整定电机参数框图所示:
3 仿真与结果分析
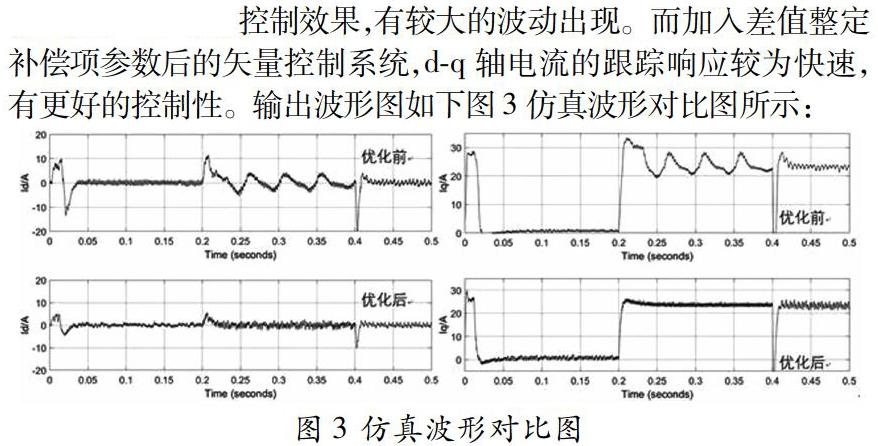
根据以上分析,在MATLAB/Simulink环境下仿真。仿真中的电机参数设置为:极对数pn=3,定子电感Ls=5.25mH,定子电阻R=0.958Ω,给定磁链ψ~f=0.1827Wb。仿真条件设置为:直流侧电压Udc=311V,采样周期Ts=10us,仿真时间0.5s。系统给定转速1000r/min,为了测试误差整定电机参数后前馈电压补偿的电流环PI调节器的解耦性能,在矢量控制系统稳定运行0.2s时,使电机的机械扭矩发生跃变到25N·m,在0.4s时减小转速为500r/min。运行仿真模型,得到永磁同步电机d轴与q轴的电流波形。对比波形图可以观察出,在转矩和转速跃变时,传统的矢量控制下的不能快速的达到
控制效果,有较大的波动出现。而加入差值整定补偿项参数后的矢量控制系统,d-q轴电流的跟踪响应较为快速,有更好的控制性。输出波形图如下图3仿真波形对比图所示:
4 结论
在分析传统矢量控制方法的基础上,考虑励磁电流和转矩电流的耦合关系,提出前馈电压补偿的解耦的控制策略和所提出的基于电流环PI调节器输出的差值整定方法。能够有效的辨别电机的实际参数,精确前馈电压反馈的补偿项,增强了其动态过程的解耦能力,使系统调节时间更短,提高了整个控制系统的控制效果。
参考文献:
[1]杨南方,骆光照,刘卫国.误差补偿的永磁同步电机电流环解耦控制[J].电机与控制学报,2011,15(10):50-54.
[2]黄知超,杨升振,延红艳,等.基于dq坐标系有功无功电流解耦空间电压矢量的STATCOM控制方法[J].电测与仪表,2012,49(12):32-36.
[3]KOSAKA M.,UDA H.Parameters identification for interior per manent magnet synchronous motor driven by sensorless control[J].Journal of Low Frequency Noise,Vibration and Active Control,2009,28(4):269-293.
[4]陈荣.永磁同步电机控制系统[M].北京:中国水利水电出版社,2009.
[5]卞延庆,庄海,张颖杰.永磁同步电机电流环电压前馈解耦控制[J].微电机,2015,48(7):68-72.
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11
