权值自适应的局部路径规划方法及应用
2019-02-07 05:32王纪云邵杭
软件导刊 2019年12期
王纪云 邵杭

摘要:移动机器人在工业生产和社会生活中逐步得到应用。路径规划是移动机器人完成其任务的前提和基础,也是机器人导航的核心技术。针对移动机器人在现有局部路径规划中无法自适应复杂环境、规划路径不合理等问题,提出基于权值自适应的局部路径规划方法。利用传感器信息自动获取合理的目标函数权值,实现具有较高实时性、安全性和鲁棒性的局部路径规划。实验结果表明,改进的动态窗口法能有效自适应复杂环境,规划的路径安全、合理、平滑,算法效率明显提升,计算量和迭代次数明显减少,总运行时间缩短20%以上。
关键词:机器人;局部路径规划;权值自适应;导航
DOI.10.11907/rjdk.191246
中图分类号:TP301 文献标识码:A 文章编号:1672-7800(2019)012-0011-03
0引言
移动机器人广泛应用在生产、生活、医疗、国防等领域,路径规划是机器人的基础技术之一,要求在一定的评价原则下找到一条从起始点到终点无碰撞的最优或次优路径…。而局部路径规划主要目的是使机器人根据环境信息以较少的时间或路程代价避开障碍物到达目标点,它受机器人自身物理及环境条件限制,因此要求实时性好、运行速度快。
目前经典的局部路径规划方法主要有人工势场法(Ar-tificial Potential Field,APF)、向量场直方图算法(VectorField Histogram,VFH)等。在人工势场法中,目标点对机器人表示吸引势能,障碍物为排斥势能,将两者势能进行叠加即可得到构造空间的势能分布,将叠加势能进行微分即表示为机器人的驱动力。向量场直方图算法则是以移动机器人为中心建立二维极线直方图表示环境,对线速度和角速度分别进行控制,较好解决了势场法的不足。但是VFH没有考虑机器人的尺寸、动力学和运动学等特性,在狭窄通道存在抖动问题。Borenstein等提出了改进的VFH+方法,之后又提出了VFH*算法,使机器人能够选择一个局部较优的运动方向。
以上传统算法无法直接得到机器人避障时的最优速度,且未考虑机器人自身物理限制。Fox等提出了较完善的动态窗口法,将机器人的物理限制、环境约束以及当前速度等因素添加到目标函数中,取得了较好效果。但这种方法有一定局限,例如在复杂环境下,机器人得到的轨迹不够平滑,在稠密障碍物区域,路径规划不合理,可能绕开稠密区域从而导致路径过长,或者在狭窄区域太靠近障碍物,容易发生碰撞等,降低了安全性和可靠性。主要原因是动态窗口法采用的是固定权值,难以适应多变的环境。
局部路径规划算法如强化学习属于机器学习方法,可用在复杂的未知环境中搜索最优路径。为提高导航准确度,将Kinect与声呐测得的障碍物信息融合,得到精确的障碍物位置信息,有助于提高动态环境中运动规划的准确性和鲁棒性。Rezaee等提出了基于虚拟行为结构的移动机器人队形控制方法。建立一种虚拟结构,每个移动机器人采用电荷模型建模,自主寻找编队中的位置,并且在移动机器人数量改变的情况下编队可以自动改变;Guzzi等提出了一种基于人类学的新型机器人局部路径算法,实现了互相避让的启发式算法;Flacco等描述了一个实时的人机共融机器人导航方法,引入了深度空间评价机器人与移动障碍物(包括人类)之间的距离计算方法;Digani等基于自动导引车(Automated Guided Vehicle,AGV)提出了一种新的避障算法,采用样条曲线、车道变换曲线和线段生成新的路径,可避开原路线上的障碍物。在人机共处环境中,不仅要避开障碍物,还要在穿越人群时确保每人有合适的空间;Sgorbissa等提出将先验环境与机器人自我感知相结合的一种导航方法,确保机器人实现最优路径;Roussos等介绍了一种多机器人的分布式导航方法,为每个机器人创造一个潜在的领域,设计了一种反馈控制方法实现全部机器人的路径规划和避撞;Kim等通过模拟人的路径轨迹,在动态障碍物中建立一种具有社会适应性的路径规划方法,设计了智能化、人性化的路径规划方法;Lopes等提出一个新颖的路径规划方法,考虑全局和局部规划,并采用平滑技术实现路径的连贯和平滑,在狭窄通道中实现较可靠的运行。以上方法在路径规划中,考虑了舒适性和人性化,但对机器人的物理限制和运行效率未作考虑。Ahhoff介绍了一种自动驾驶中汽车安全路径检测方法,通过检测公路上的车辆和其它障碍物验证车辆运行的安全性,在卡内基梅隆大学机器人研究所的自动驾驶仪上验证了该方法的有效性。但是上述算法大多需要较多传感器信息和数据,计算量较大且比较耗时。
本文针对动态窗口法的现有问题,采用较简单的传感器获取环境信息,自动调整复杂环境下的目标函数权值,实现具有较高实时性、安全性和鲁棒性的机器人局部路径规划。不仅实现合理避障,而且在穿越人群时保持与人合理的“社交距离”。
1参数自适应路径规划
动态窗口法引入了速度空间概念,将机器人控制问题转化为速度控制,将二维空间的避障问题转化为速度空间带约束的优化问题,同时考虑机器人速度和加速度约束、环境和障碍物约束,因此得到的速度可以直接为机器人使用。
然而,现有的动态窗口法还存在一些问题,具体表现为:①现有DWA算法在进行刹车判断时会忽略速度的方向性,把一些可行速度判断为不可行速度,导致最优速度被剔除,从而使机器人选择不合理的速度,例如在密集障碍物区域出现绕行;②在某些情况下,太小的速度权值使优化得到的速度和航向角不合理,导致路径过于靠近一侧障碍物,安全性较低,缺少人性化。反之,太大的速度权值使轨迹不够平滑,机器人绕障碍物密集区域的外围行走导致路程过长。
1.2改进的路径规划方法流程
改进的动态窗口法流程如下:
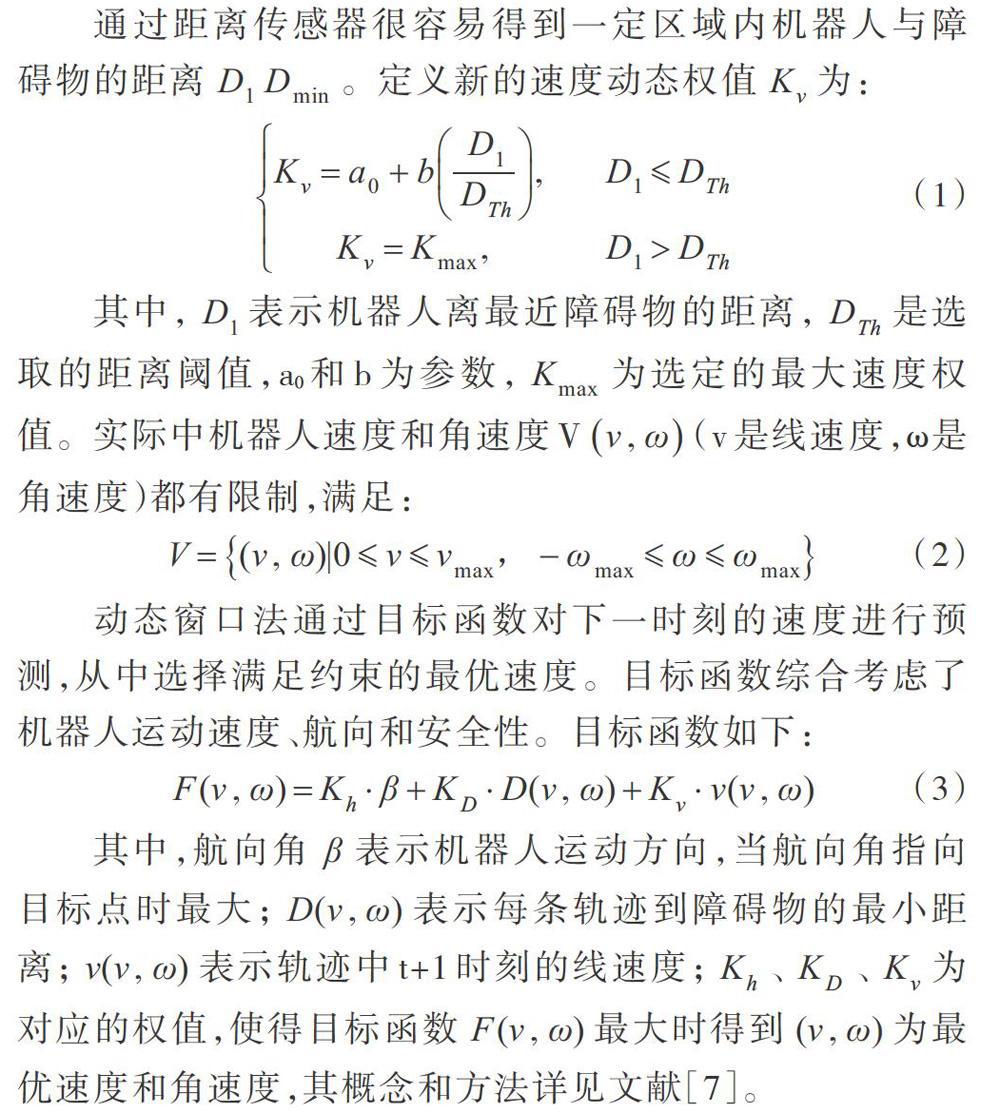
(1)利用传感器信息,获得t时刻机器人与障碍物的距离D,和航向角。
(2)利用公式(1)计算线速度的动态权值Kv。
(3)自动搜索速度空间:①根据机器人当前t时刻速度和物理约束,获得t+1时刻机器人的可达速度、所有可达速度;②由t时刻的(v,ω)生成运行轨迹;③利用物理、环境和障碍物约束,推算t+l时刻的全部可行速度(v,ω)。
(4)将动态权值yd代人目标函数式(3),目标函数的3个输入需要归一化,利用最大化目标函数获得t+1时刻的最优速度组合。
(5)运行一个时间间隔,如果未到达目标点,返回步骤(1),进人下一时刻循环,否则结束。
2仿真实验结果与分析
为验证提出方法的有效性和适用范围,在3种不同情况下对避障效果进行仿真对比并分析结果。
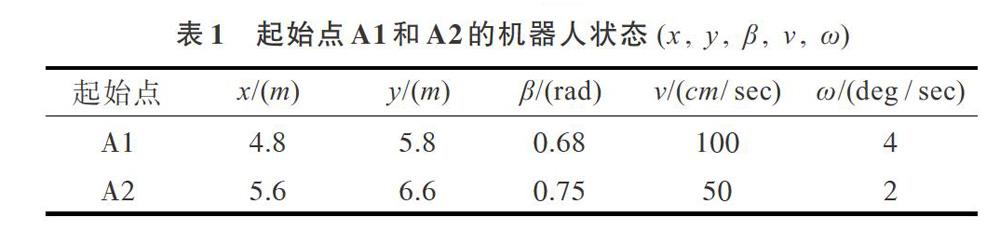
2.1仿真实验参数
根据机器人实际情况,选取的参数见表1。权值kh=1,KD=5,K分别取20,2和动态可调,DTh为0.8m,其它参数aO和b分别为2和14,Kmax为20。
2.2改进后避障对比实验
在同一地图中进行避障对比实验,结果如图l所示。图l(a)为速度权值为20时的运行轨迹,路径12.8m,步数142,历时14.5s。A处过于接近障碍物,安全性较低;图1(b)中的速度权值2,轨迹长12.86m,运行步数216,历时22.3s,步数和时间高于高权值时。在通过狭窄通道A处时机器人从障碍物中间通过,安全性较高。改进算法的机器人轨迹如图l(c)所示,轨迹长12.8m,步数165,时间16.52s。和高权值图1(a)对比,不但运行速度较高,而且安全性高,和低权值图1(b)对比,步数和时间都降低,效率明顯提高。图l(d)为3种权值轨迹,其中速度权值为2,与动态时轨迹基本重合,路径合理,表示动态权值与低权值的安全性相同。
从实验可以看出,算法改进后,机器人可以同时在安全和效率两个方面得到保证,计算量(迭代次数)降低24%,总运行时间下降23%。
3结语
本文针对动态窗口法中存在的问题,提出了权值自适应的局部路径规划方法。利用传感器获取的距离信息,通过权值的自动调整,实现在多障碍物区域自动推算出最优的线速度和角速度,解决机器人在多障碍物区域的绕行及轨迹不平滑问题,从而实现安全、高效和可靠的机器人局部避障算法,使机器人运行轨迹更加合理、安全和有效。