基于非凸低秩优化的压缩感知植株图像重构
2019-02-07 05:32沈跃李尚龙崔业民朱嘉慧刘加林
软件导刊 2019年12期
沈跃 李尚龙 崔业民 朱嘉慧 刘加林
摘要:目标植株图像压缩重构对于图像的高效传输及存储意义重大,同时为后期植株生长状态检测及病虫害识别奠定了基础。传统图像压缩感知方法大多是针对信号在某个特征空间的稀疏性进行的,并没有考虑信号的局部特征与结构化特性,存在重构效率不高、重构精度较低等问题。针对以上情况,提出一种基于非凸低秩优化的压缩感知植株图像重构算法。首先通过KinectV2.0采集植株图像深度数据并进行预处理,结合K-means与Mean-shift聚类算法提取目标植株有效区域,再考虑图像的非局部自相似性,采用加权lp范数最小化算法(wsNM)求解低秩优化问题,较好地保留了图像结构细节,最后采用Dog-leg最小二乘算法取代最快下降法进行迭代优化。试验结果证明,该算法在不同采样率下的植株图像重构质量优于其它同类算法,尤其在低采样率下重构效果更为突出。
关键词:压缩感知;图像重构;低秩优化;聚类算法;Dog-Leg最小二乘法;深度信息
DOI:10.11907/rjdk.191237
中图分类号:TP317.4 文献标识码:A 文章编号:1672-7800(2019)012-0173-07
0引言
随着农业信息化与自动化的持续发展,图像采集技术被广泛运用于现代农业生产中,农田信息获取技术已成为精准农业的关键技术之一。其中对目标植株图像进行压缩重构对于图像的高效传输与存储意义重大,同时也为后期植株生长状态检测及病虫害识别奠定了基础。因此,如何高质量、高速率地对图像进行压缩采集与重构已成为国内外机构的研究热点。
在农业植株检测与识别过程中,目标物体识别是首先需要解决的问题。吴焕丽等提出基于HSV空间的自适应果蝇均值聚类算法分割图像背景,该算法加快了小麦图像分割速度,一定程度上提高了小麦覆盖率,但对于具有如滴灌带等局部干扰因素的图像分割效果并不突出;马博珩等选用共轭梯度下降算法取代最快下降法,结合正交匹配追踪算法进行图像重构,初步提高了图像重构速度,但处理过程中忽略了图像的局部特征与结构化特性,重构精度并没有得到太大改善,且该方法在迭代计算过程中不太稳定,容易出现贪婪问题;代媛等提出一种压缩感知苹果图像的并行快速重构方法,该算法分析了二维正交匹配跟踪重构算法的并行性,结合GPU通用并行计算平台设计出对应的并行化重构算法,初步提高了苹果图像重构效率,但是并没有保证苹果图像重构质量,且未能消除复杂背景;宋云等引入低秩矩阵恢复思想,考虑到图像的非局部自相似性,将图像恢复问题转化成聚合的相似块矩阵秩最小问题,有效提高了图像重构质量,但其在迭代上也采用共轭梯度算法,从而影响到算法整体的稳定性和鲁棒性。
因此,本文在前人研究的基础上,提出一种基于非凸低秩优化的压缩感知植株图像重构算法。首先通过Ki-nect V2.0采集目标植株的彩色图像和深度数据,对获取的植株图像进行深度预处理,并结合K-means和Mean-shift聚类算法提取目标植株有效区域;再考虑图像的非局部自相似性,采用加权lp范数最小化算法求解低秩优化问题,较好保留了图像结构细节;最后采用Dog-leg最小二乘算法取代最小二乘法进行迭代优化,以加快算法整体重构速度。该算法不仅解决了传统重构算法重构精度低的问题,而且很大程度上提高了目标植株重构效率,对于农业中的相关控制决策具有一定指导意义。
1材料与方法
1.1植株图像目标区域提取
1.1.1植株图像采集
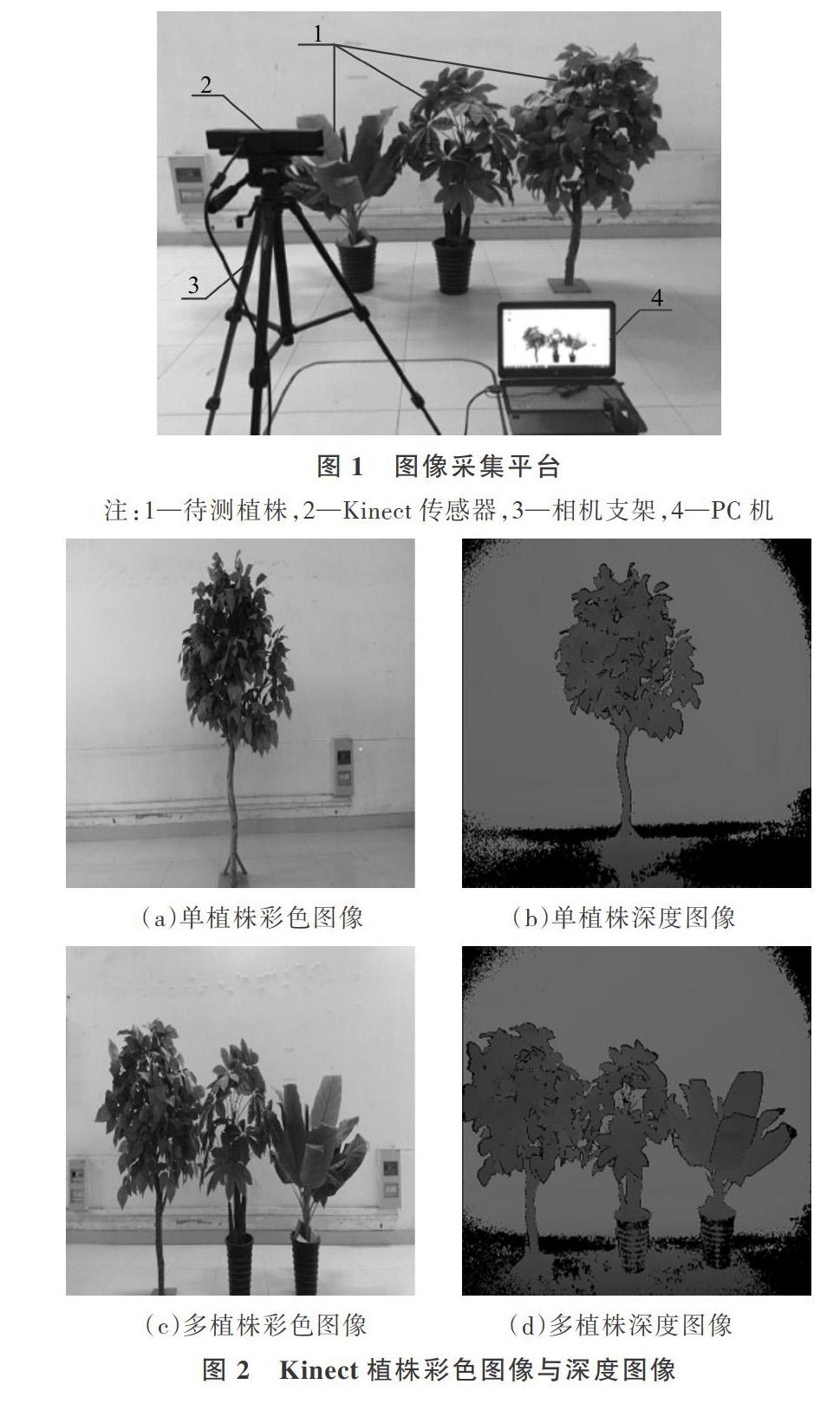
为了获取目标植株的彩色图像及深度数据,搭建如图1所示的试验平台,主要包括Kinect二代传感器、PC机、相机支架和若干待测植株。Kinect传感器固定在相机支架上,通过USB延长线接口连至PC机,待测植株与Kinect传感器之间距离约为1700mm。
试验分为两组进行:第一組目标植株为单植株,植株高度为1.8m;第二组目标植株为多植株,选取3棵不同高.度的待测植株,高度分别为14m、1.2m和1.0m。使用Ki-nect V2.0传感器提供的Kinect for Windows SDK结合OpenCV库获取待测植株的彩色图像和深度图像,见图2。
1.1.2深度数据预处理
由于采集到的植株图像背景较为复杂,将严重影响后期图像重构效率,如何去除植株背景干扰对于后期重构处理至关重要。Kinect传感器采用TOF获取空间的深度数据信息,合理设置待测植株与传感器之间距离,即能将图像中的待提取物从背景中分离出来。因此,本文根据Kinect传感器的这一特征,采用彩色图像和深度图像相结合的方法提取目标植株关键区域。
Kinect传感器识别的最佳限制距离范围为1500-1800mm,因此本文将待测植株放置于传感器前方约1700mm,通过图像采集平台(见图1)采集图像,进而通过距离限制初步将目标植株与背景分离。程序设置距离内的区域像素值为1,距离外的区域像素值为0。
1.13K-means与Mean-shih聚类算法
聚类分析算法是用于数据挖掘的一个重要算法,被广泛运用在图像分割、图像融合等各个领域,其中以K-means算法最为常见。虽然K-means聚类相对简单,对于数据集的处理效率也较高,但其初始聚类中心需要从n个数据对象中任意选择,对于噪声的鲁棒性并不强,且想要达到最佳分割效果需要经过大量反复试验,一定程度上增大了工作量。Mean-shift算法能够在一组数据的密度分布中寻找到局部极值,并实现无参密度估计,即可对服从任意分布的数据进行密度估计。此外,Mean-shiN算法是一个单参数算法,容易作为一个模块与其它算法进行集成。因此,本文将K-means聚类与Mean-shiN算法相结合,将Mean-shiN聚类后的质心作为K-means算法初始中心进行聚类,避免了因K-means初始中心不确定导致的大量试验,具体流程如图3所示。试验结果表明初始聚类中心为2时,分割效果最好。
为了提高后续图像重构效率,只需保留目标植株所在图像区域,去除背景中其它干扰物。在进行深度数据处理得到的二值图像基础上,水平方向从上到下、从下往上依次对每一行求和,直到找到第一个非空白行为止,记为第m行、第n行;同样,竖直方向从左往右、从右到左依次对每一列求和,直到找到第一个非空白列为止,记为第i列、第j列。在原彩色图像上截取第m行~第n行、第i列~第j列的矩形区域,即为要提取的目标植株所在图像区域。处理后的图像如图4所示。
图4(a)、图4(c)分别为Kinect传感器拍摄的单植株和多植株图像,图4(b)、图4(d)分别为对应去除复杂背景后的彩色图像。其中黑色部分是被去除的无目标植株部分,保留了植株所在矩形区域。
1.2压缩感知理论
压缩感知理论主要由信号稀疏表示、测量矩阵与重构算法3部分组成。图像压缩感知重建观测得到的随机测量值,其维度远小于原始图像维度,目的在于通过观测得到的一组随机测量值复原原始图像。具体而言,设原始信号f∈RN+1,在变换基ψ下的稀疏向量为x,即f=ψx。对原始信号厂进行测量,公式为:
由于上述最小lo范数方法是一个不确定多项式(NP)问题,同时对噪声很敏感,很难直接进行优化且无法验证其准确性,因此需要更加有效的重构算法对信号进行精确重构。
1.3加权lp范数非凸低秩优化
1.3.1非局部自相似与低秩特性
任意一幅图像的结构信息都存在大量重复部分,其中随便一个样本块,都能在该图像中寻找出大量相似块,并且这种相似结构不仅存在于平滑区域,在纹理及边缘轮廓中也一样存在。利用图像的这种非局部自相似性,不仅能解决传统重构算法中因未考虑信号局部特性和结构化特征导致的重构精度不高的问题,同时也提高了算法本身的适应性。提取部分图像块作为样本块,将与其相似的其它图像块统一按照行或列展开得到一维向量。以此类推,将得到的所有一维向量组合成二维相似块矩阵。由于相似图像块之间结构纹理近似,即提取到的图像相似块一维向量之间具有强相关性,因此该二维相似块矩阵具有低秩特性。从另一方面看,矩阵的秩也可作为矩阵稀疏性的衡量方法,即求解信号稀疏性的图像重构问题可引申为基于秩最小化的图像重构问题。
1.3.2加权lp范数低秩优化
2试验与结果分析
为了验证本文方法的正确性和有效性,本文通过MATLAB R2015处理平台对该算法进行各项测试。试验主机CPU配置为Intel Core i5,主频为3.60GHz,内存为8G,操作系统为Window 10。圖像采用256×256植株图作为测试对象,主要分为单植株图像重构和多植株图像重构两种情况进行。每种情况均重复实验200次,试验中采用离散小波变换对图像进行稀疏化表示,测量矩阵采用随机高斯测量矩阵。
重构算法性能指标分为重构效率和重构精度两类。重构效率用重构时间进行衡量,同等条件下重构时间T越小,重构效率越高;重构精度分为主观性评价标准和客观性评价标准两种。主观标准主要指通过视觉感知判断一幅图的清晰度,本文采用结构相似度(sSIM)进行衡量,相同条件下SSIM越高,重构精度越高;客观标准则可以由峰值信噪比(PSNR)表示,相同条件下PSNR越高,重构精度越高。
2.1不同p值下单植株图像重构效果对比
通过植株图像采集平台获取单植株彩色图像,经过深度数据预处理以及K-means与Mean-shift聚类算法提取植株图像目标区域并转化成灰度图。对于p值选取,在0.1-1范围内以0.1为步长进行,分别在采样率(M/N)为0.05、0.10、0.15、0.20、0.25、0.30的情况下对图像进行重构。选取峰值信噪比作为评价指标,具体情况如图5所示。
由图5可以看出,在不同采样率下,当p值取0.8时,峰值信噪比最高,植株重构效果最好。同时,由于传统压缩感知重构算法大多属于最小lo范数或最小l1范数算法,因此本文的非凸低秩加权lp范数最小化算法重构效果明显优于其它传统算法。
为了从视觉角度更直观地说明重构效果,选取采样率(M/N)为0.15时,单植株在p值为0.4、0.8、1.0时的重构效果图,如图6所示。选取叶片末梢及枝干部分进行放大并置于右上角处,从图中可以看出,p为0.4时,植株图像重构的伪影较多,叶片轮廓等具体信息不够清晰;p为1.0时,重构质量有所提高,但从右上角部分放大图可以发现,暗影部分依旧存在;p=0.8时,植株重构效果最好,暗影明显减少,同时叶片末梢及枝干处的轮廓等细节信息都得到了很好保留,在直观视觉感受方面有很大程度提高。
2.2不同算法下植株图像重构效果对比
为了评估提出算法的性能及鲁棒性,本文针对采集到的单植株和多植株图像,分别测试测量值有噪和无噪情况下的重建性能。
2.2.1无噪情况下植株重构对比情况
以采集到的单植株图像为例,经过预处理之后提取植株目标区域,选取采样率(M/N)为0.15时当前主流的压缩感知重构算法TV、BM3D-CS、NLR与本文提出算法(p=0.8)进行对比,具体如图7所示。
重构过程中选取叶片末梢及枝干处进行放大并置于图像右上角,以便观察细节。从图中可以看出,在TV算法下由于局部平滑特性较弱,重构效果不太理想,图像暗影较多,特别是枝干处较为模糊,不能很好地适应复杂纹理;BM3D-CS算法下的重构效果与其相比得到了很大程度提高,从放大部分可以看出,暗影已有明显减少;对于NLR-CS与本文提出的重构算法,低秩正则项的引人很好地利用了图像的非局部特征和结构特性,整体效果优于前两种算法,而相比之下,由右上角的局部放大图可以看出,本文算法下枝干处的伪影几乎全部消失,叶片末梢及轮廓等细节信息也更好地得到保留,效果优于NLR-CS算法。
为了定量分析4种算法下单植株图像的重构效果,本文采用重构时间T、结构相似度SSIM以及峰值信噪比PSNR 3种评价标准在采样率(M/N)为0.1、0.15、0.20、0.25、0.30情况下进行对比分析,具体情况如表1所示。
从表1可以看出,在运行时间方面,TV算法重构时间最长,BM3D-CS和NLR-CS两种算法重构速度比较接近,而本文算法相比其它3种算法,重构速度有了很大提高,比TV算法提高了2.796s,比NLR-CS算法提高了1.510s,且采樣率越大,速度差越大;在峰值信噪比(PSNR)方面,本文算法具有很大优势,与其它3种算法相比,依次平均提高了14.24dB、7.08dB和2.47dB;同时,在结构相似度(sSIM)方面,相比于TV和BM3D-CS两种算法,本文算法与NLR-CS算法效果最佳且比较接近,在采样率为0.30时,SSIM分别达到了0.9912和0.9947。由此可以看出,经过深度数据预处理以及K-means和Mean-shift聚类算法提取出植株图像目标区域后,去除了背景中不必要的干扰,一定程度上提高了后期重构速度,并且采用Dog-Leg最小二乘算法作为迭代算法,在有效提高收敛速度的同时,也保障了算法的整体重构精度。
2.2.2含噪情况下植株重构对比情况
为了评估算法在含噪状态下的鲁棒性,本文在测量值中加入不同量级的噪声进行测试,比较各种算法的重建性能。
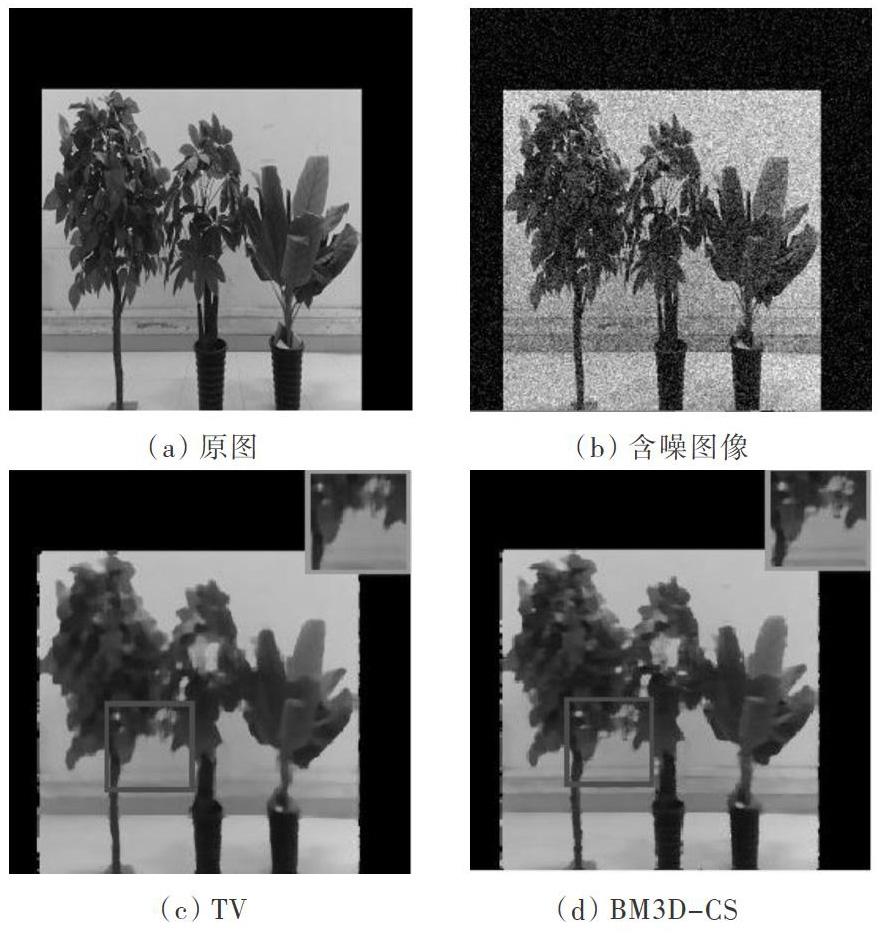
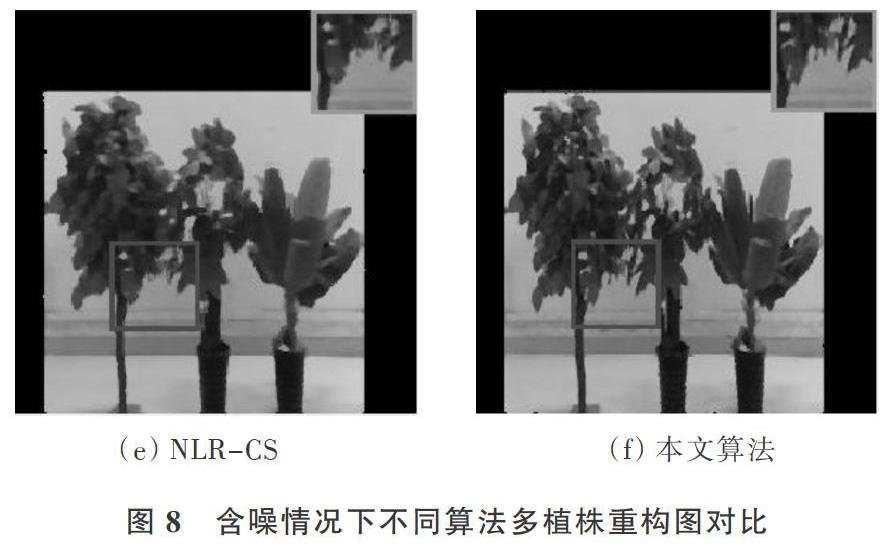
以采集的多植株图像为例,噪声选取高斯白噪声,均值为0,标准差为0.01,经过预处理之后提取植株目标区域,同样选取采样率(M/N)为0.15时,当前主流的压缩感知重构算法TV、BM3D-CS、NLR-CS与本文算法(p=0.8)进行对比,具体如图8所示。重构过程中选取前两棵植株树干及叶片末梢部分进行放大,并置于图片右上角以便于观察图像细节信息。
由图8可以看出,在直观的视觉感受上,当采样率(M/N)为0.15时,TV算法对于加噪之后的植株图像重构结果很模糊,树叶的轮廓、纹理等细节信息丢失严重,整体效果类似于油画;BM3D-CS和NLR-CS两种算法相比TV算法整体效果有所改善,但左边第一棵树的树叶密集处依旧比较模糊;本文算法对于加噪之后的多植株图像重构效果最佳,3棵植株树叶处的纹理都比较清晰,从右上角的局部放大图可以发现,叶片轮廓等细节信息也很好地得到了保留。
为了定量分析含噪环境中图像在不同算法下的重构效果对比情况,图9给出了在采样率为0.15时,多植株图像在测量值受不同量级高斯白噪声影响的环境下,不同算法的重建性能曲线。横轴为图像感知测量值的信噪比(singal to Noise Ratio,SNR),范围为15~35dB,步长为5,纵轴为重建图像的峰值信噪比PSNR。
可以直观地看出,在采用TV和BM3D-CS两种算法时,图像重构精度起初增长较快,但后期随着测量值信噪比的增大,曲线增长幅度逐渐减小,而NLR-CS算法与本文算法的重构效果增长趋势较为稳定,其中可明显看出,本文算法在含噪环境下的重建性能依然优于其它对比算法,取得了很好的重构效果。
3结语
传统图像压缩感知方法大多是针对信号在某个特征空间的稀疏性进行的,并没有考虑信号局部特征和结构化特性,存在重构效率不高、重构精度较低等问题。本文针对这些情况,提出一种基于非凸低秩优化的压缩感知植株图像重构算法。首先通过Kinect V2.0采集植株图像的深度数据并进行预处理,结合K-means与Mean-shih聚类算法提取目标植株有效区域,再考虑图像的非局部自相似性,采用加权lp范数最小化算法求解低秩优化问题,较好地保留了图像结构细节,最后采用Dog-leg最小二乘算法取代最快下降法进行迭代优化。同时,为了评估提出算法的性能及鲁棒性,本文针对采集的单植株和多植株图像分别测试了测量值有噪与无噪状态下的重建性能。试验结果证明,本文算法在不同采样率下的植株图像重构质量都优于其它同类算法,尤其在低采样率下重构效果更为突出。
(1)本文通过Kinect传感器采集植株图像深度数据并进行预处理,同时结合K-means和Mean-shift聚类算法提取目标植株有效区域,去除了背景中不必要的其它干扰物,为提高后期重构效率提供了可能。
(2)考虑到图像的非局部相似性与结构特性,本文采用加权lp范数最小化算法求解低秩优化问题,较好地保留了图像结构细节,一定程度上提高了植株图像重构精度。试验结果证明,在不同采样率下,p值不同,重构效果也不同。当p值取0.8时,重构精度最高。因此可以得出,非凸低秩加权lp范数最小化算法重构效果明显优于其它传统算法。
(3)结合Dog-Leg最小二乘算法,避免了最快下降法运算过程中因过于贪婪导致的收敛速度减慢的情况,同时混合了GaussNewton法的特性,保证了算法整体的稳定性。试验结果证明,Dog-Leg法加快了收敛速度,提高了算法整体重构效率,并在一定程度上改善了图像重构精度。
(4)本文分别在无噪和含噪环境下对采集到的单植株与多植株图像进行试验。结果证明,在两种环境下,本文算法不论在重构效率还是重构精度上,效果都优于NLR-CS等其它当前主流的压缩感知算法。
(5)该方法也可进一步推广应用于其它场合的图像采集中,以实现基于Kinect传感器的农业植株生长状态监测以及病虫害防治。