
一种改进Canny的热红外边缘检测方法
2019-02-13 01:36李宝磊李清英秦乾坤刘云飞徐恩松王啸伟
计算机时代 2019年1期
关键词:边缘检测
李宝磊 李清英 秦乾坤 刘云飞 徐恩松 王啸伟


摘 要: 不论制冷还是非制冷热红外影仪,其成像机理都会使图像中存在大量的噪声,导致边缘提取困难,而边缘检测是图像特征提取的关键技术。基于传统Canny边缘检测算法提出了一种改进,利用数学形态学替代高斯滤波对具有随机噪声的热红外图像进行形态学去噪,利用Otsu算法替代双阈值算法自主选择阈值,最后进行边缘提取。Matlab仿真结果表明,与传统的Canny边缘检测算法相比,该方法不仅有较强的抗噪性,而且还有较强的自适应性,较好的保持了图像细节与连续性。
关键词: 边缘检测; 热红外图像; Canny; 数学形态学; Otsu算法
中图分类号:TP751.1 文献标志码:A 文章编号:1006-8228(2019)01-63-04
Abstract: Whether refrigerated or uncooled thermal infrared imagery, its imaging mechanism will cause a lot of noise in the image, resulting in the difficulty of edge extraction, while edge detection is the key technology of image feature extraction. Based on the traditional Canny edge detection algorithm, an improved algorithm is proposed, which uses mathematical morphology instead of Gaussian filter to denoise the thermal infrared image with random noise, and uses Otsu algorithm instead of the double threshold algorithm to select the threshold independently, and finally to extract the edge. the simulation results of MATLAB show that compared with the traditional Canny edge detection algorithm, this method not only has strong noise resistance, but also has strong self-adaptability, and better maintains the image details and continuity.
Key words: edge detection; thermal infrared image; Canny; mathematical morphology; Otsu algorithm
0 引言
紅外图像的边缘检测在特征提取、目标识别等领域有着广泛的应用,目前,针对红外图像的边缘检测方法主要有Sobel算子、Prewitt算子、Krisch算子和Canny算子等一阶微分算子以及类似LoG算子的二阶微分算子[1]。但是,运用上述检测算子或者检测方法在红外热波图像处理时会有相应缺陷。对此,大量的科研工作者提出一些改进方案,夏清等人[2]针对边缘检测中的噪声干扰,提出用形态学方法代替高斯滤波以解决滤波尺度无法自适应的问题,许宏科[3]引进Otsu 算法自适应地根据图像灰度生成高低阈值,避免了人为设定高低阈值的难题。本文针对Canny算法作出一定改进,运用Matlab仿真,取得了一定效果。
1 基本原理概述
1.1 Canny算子边缘检测算法
1.1.1 Canny算子基本原理
Canny边缘检测算子是一个多级步骤边缘检测算法,基于以下三个指标:低误判率、高定位精度、抑制虚假边缘,在此基础上,Canny提出了一种很有效的边缘检测算法,该算法的实现主要有四个步骤:
⑴ 使用高斯滤波器对原图像进行滤波;
⑵ 对滤波后的图像求梯度幅值以及梯度向量;
⑶ 对梯度图像进行非最大值抑制操作,剔除非最大值的像素点;
⑷ 确定高、低阈值并结合连接分析方法确定图像最终的边缘,高、低阈值大小的选择,对检测得到的边缘质量有着关键性影响[3]。
Canny 算法处理流程如图1所示。
1.1.2 Canny算子缺陷分析
图像处理之前都要对图像进行降噪处理,Canny算法的第一步骤也是最影响其检测效果的主要因素,就是高斯滤波器中开窗宽度σ和高低阈值的选取。σ越小,频带越宽,可以保持较好的细节信息,但是不能得到理想的降噪效果,σ越大,频带越窄,图像的降噪效果较好,但是可能会造成过度平滑,丢失图像细节信息[4]。σ的人为设置导致图像平滑、去噪和细节保持之间的矛盾。高斯滤波器对服从正态分布的噪声有很好的抑制效果,但对红外图像特有的1/f噪声的滤波效果较差。而一般阈值的稍微改动,就会引起结果的极大变化,最终得不到好的效果。
1.2 数学形态学
数学形态学诞生于1964年,也被称为图像代数,一般被用于表示以形态为基础对图像进行分析,其基本思想是具有一定数学形态的结构元素去度量和提取图像中的对应形状,以达到对图像分析和识别的目的[5]。形态学的基本运算有以下四个:腐蚀(或侵蚀)、膨胀(或扩张)、开启和闭合。假设f(x,y)为灰度图像,b(m,n)为形态学结构元素,灰度形态学各运算定义如下:
⑴ 膨胀运算:
⑵ 腐蚀运算:
⑶ 开运算:
⑷ 闭运算:
在上述公式中,f(x, y)为图像的灰度级,b(m, n)为结构元素。⊕、Θ、○、●分别为运算符号。
1.3 Otsu算法
Otsu算法,即最大类间方差法,可以自适应地确定阈值。利用图像的灰度信息,把图像分类成目标和背景,目标与背景之间的类间方差越大,那么分类越正确,而当目标和背景存在一定程度的错分时,相应类间方差会变小,所以当类间方差最大时,目标与背景错分的概率就最小[6]。假设表示总像素值为N的图像中的L个不同的灰度级,ni表示灰度级为i的像素数,则存在以下关系:
正副图的灰度值与方差分别为:
对于一幅图来讲,μ和σ2为常量,与t无关。C0类和C1类的类间方差为:
让t在[0,L-1]范围依次取值,即求时的对应t值,为最佳阈值。越大,说明图像分割的效果越好,即最大化分开目标与背景。
2 本文的改进算法与结果分析
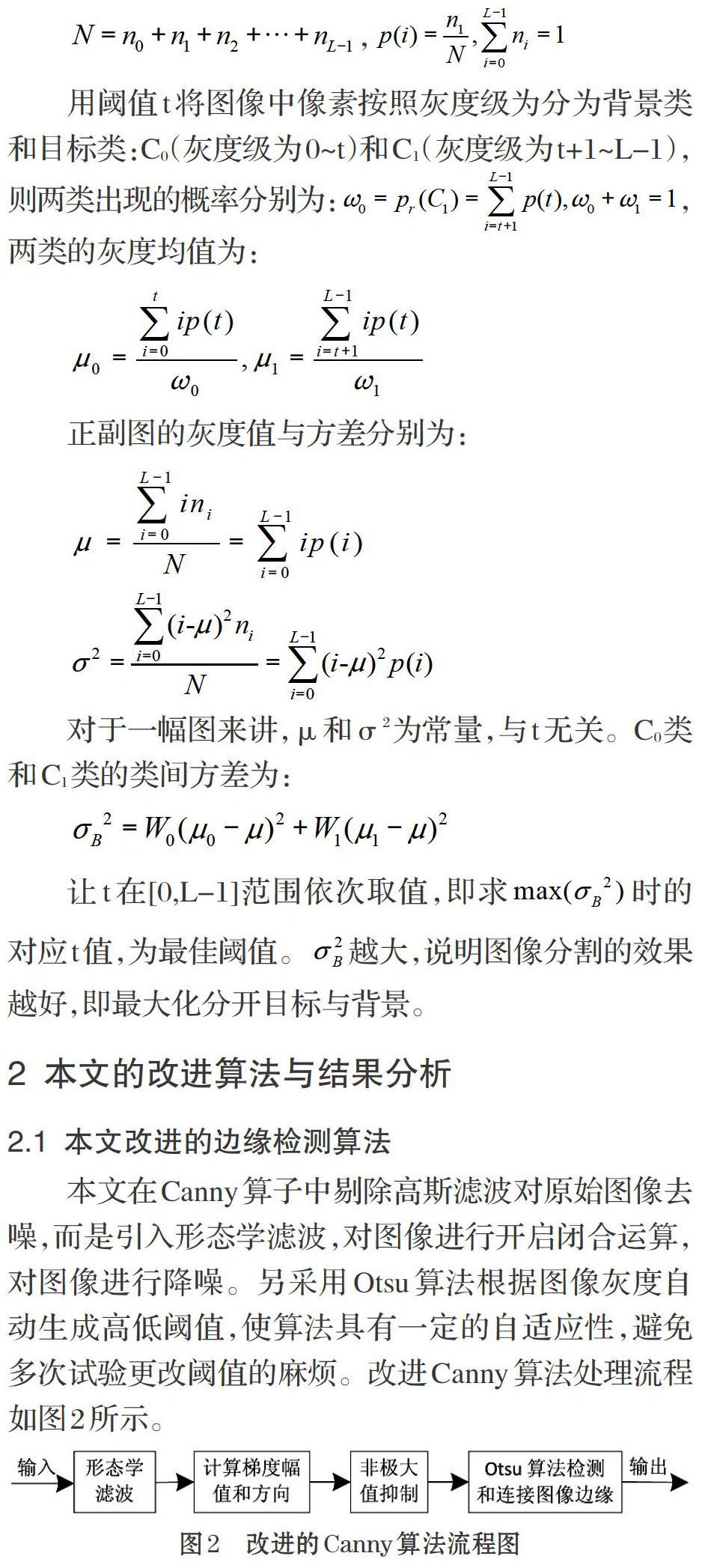
2.1 本文改进的边缘检测算法
本文在Canny算子中剔除高斯滤波对原始图像去噪,而是引入形态学滤波,对图像进行开启闭合运算,对图像进行降噪。另采用Otsu算法根据图像灰度自动生成高低阈值,使算法具有一定的自適应性,避免多次试验更改阈值的麻烦。改进Canny算法处理流程如图2所示。
算法具体步骤如下。
⑴ 首先对含有大量噪声的热红外图像进行形态学去噪,利用开运算能够消除形状小于结构元素的目标点,采用不同尺度、不同结构元素对图像依次进行形态学闭运算,连接相邻物体以及平滑图像边缘。本文分别选用3×3的十字形结构元素A1与2×3的矩形结构元素A2,如下所示:
一般来说,结构元素尺度过大,虽然去噪能力增强,但是会去除掉组多细节;相反尺度较小,保持了图像边缘细节,但是降噪能力太差。但是如果将开启闭合结合起开,即先进行开启运算,再进行闭合运算,当然,为了使效果更好,可以使用不同的结构元素,这样既能够去除噪声,又能够保持细节信息。
⑵ 用一阶偏导有限差分计算梯度的幅值和方向。
关于图像灰度值的梯度可使用一阶有限差分来进行近似,这样就可以得图像在x和y方向上偏导数的两个矩阵。本文放弃传统的2×2邻域内有限差分来计算梯度幅值,使用3×3的卷积模板可以改善环境影响,卷积模板如下:
其中,Gx检测水平边缘,Gy检测垂直边缘。一阶偏导数矩阵的数学表达式为:
图像中每个像素点(x,y)的梯度幅值M(x,y)和梯度方向θ(x,y)为:
⑶ 对梯度幅值进行非极大值抑制。
图像梯度幅值矩阵中的元素值越大,说明图像中该点的梯度值越大,但这仅仅是属于图像增强的过程,还不能说明该点就是边缘点[4]。在Canny 算法中对梯度幅值进行非极大值抑制,遍历图像,若某个像素的梯度值与其梯度方向上前后两个像素的梯度值相比不是最大,那么这个像素就不是边缘,设置非极大值点梯度为0[7]。
⑷ Otsu算法求取阈值。
利用Otsu算法对非极大值抑制图像进行全局阈值分割,避免人为设置阈值大小,增强自适应能力。分割后划分为二值图像,图像中边缘闭合,最后得到边缘图像。步骤如图3所示:
2.2 实验与结果分析
本文采用的是ThermPulse-S12分体式热波成像无损检测系统,此系统搭配非制冷焦平面红外热像仪,热像仪分辨率为384(H)×288(V),热激励源为最高能量12000焦耳的闪光灯。利用此设备检测的是一块ABS塑料板,其背面有多个深度,半径不同的孔,用于对比检测效果。同时为使本文算法仿真效果明显,对成像增加2%椒盐噪声,热红外原始图像,三维图像及添加噪声后图像如图4~图6所示。
热红外图像本身存在大量的噪声,从图7中可以看到,普通的边缘检测算法会呈现出大量的噪声或者无法检测出边缘特征,对于ABS塑料板中的较浅半径较小的孔洞的缺陷无法检测,缺陷特征全程被已加的椒盐噪声覆盖,并没有被很好的去除。图8中,替代高斯滤波的形态学去噪算法,通过开启闭合操作后,不仅可以去除掉绝大部分噪声,而且可以很好的保留边缘信息为后续步骤提供好的检测基础。后期的检测结果也令人满意,样件的缺陷也大多呈现出来,改进的算法检测结果优于传统算法的结果。
3 结论
本文针对传统 Canny 边缘检测算法存在的缺陷,通过引入数字形态学以及Otsu最大类间方差法,取得了良好的边缘检测效果。实验表明,改进算法可以在去除噪声的同时,自主选择阈值,保留了更多的边缘细节,有着较好的抗噪性,自适应性,使边缘特征更具连续性。
参考文献(References):
[1] 叶德周,杨风健,貌程浩等.基于Canny算子的红外图像边缘检测算法[J].激光与红外,2015.45(9):1129-1132
[2] 夏清,胡振琪,位蓓蕾等.一种新的红外热像仪图像边缘检测方法[J].红外与激光工程,2014.43(1):318-322
[3] 许宏科,秦严严,陈会茹.一种基于改进Canny的边缘检测算法[J].红外技术,2014.36(3):210-214
[4] 郭慧鑫,牛竹云,郭会兵等.一种基于Canny算子的红外图像边缘检测算法[J].火力与指挥控制,2014.s1:95-97
[5] 陈爱军.数学形态学及其在图像分析中的应用[J].红外与激光工程,2006.35:465-468
[6] 王雪娇,陈攀.基于FPGA的自适应阈值边缘提取的Canny算法的实现[J].电子世界,2014.11:105-106
[7] 周同,邹丽新,尤金正等.基于改进Canny边缘检测算子的电子稳像算法研究[J].计算机应用研究,2010.27(2):506-508
猜你喜欢
山东工业技术(2016年24期)2017-01-12
计算技术与自动化(2016年4期)2017-01-11
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年27期)2016-12-15
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年23期)2016-11-02
科教导刊·电子版(2016年18期)2016-07-18
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年9期)2016-04-26
科技视界(2016年3期)2016-02-26
