
基于模糊PID的车辆横向稳定系统研究
2019-03-05 04:01李然然
汽车实用技术 2019年3期
李然然
基于模糊PID的车辆横向稳定系统研究
李然然
(长安大学,陕西 西安 710064)
通过分层控制思路搭建上层与下层控制器,设计基于横摆力矩控制的车轮横向稳定性控制算法。上层控制器以期望的横摆角速度和质心侧偏角为目标,采用模糊PID算法得到维持汽车稳定需要的横摆力矩,下层控制器根据需要的横摆力矩对单侧轮胎制动,从而增加乘用车极限工况下的稳定性。最后,搭建Matlab及Simulink仿真平台,利用CarSim软件对横向稳定策略进行验证,并选择典型试验工况仿真确定该策略能显著改善车辆的横向稳定性。
横向稳定控制;横摆角速度;质心侧偏角;联合仿真
前言
乘用车横向稳定控制系统(ESC)是在防抱死制动系统(ABS)和牵引力控制系统(TCS)的基础上扩展开发出的一种新型的主动安全技术。它通过主动干预横摆力矩的方式来提高极限工况下车辆的稳定性[1]。目前,国内乘用车装载的ESC主要由外国公司提供,而国内对该技术的研究相对滞后。横向稳定控制常用的控制有逻辑门、PID控制和模糊控制[2],本文采用模糊PID控制理论,利用Carsim软件对整车模型进行车辆动力学仿真,验证了该控制方法能够在较为恶劣的道路条件下对维持车辆横向稳定起到一定良好效果。
1 系统模型
1.1 参考模型-线性二自由度模型
在车辆基本的转向操作模型中,线性二自由度车辆模型是最常见的,也是目前研究中采用最多的车辆参考模型。将方向盘与轮速传感器得到的相关参数输入到车辆参考模型中,就可以了解驾驶意图[3]。采用简化的线性二自由度模型来研究汽车的横向和横摆两个自由度,能够得到理想的汽车质心侧偏角和横摆角速度[4]。由线性二自由度车辆模型可知,汽车受到的外力与力矩为:
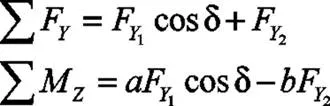
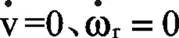
由式(1)可得二自由度汽车运动微分方程为:
式中:δ为前轮转角;u、v分别为车辆质心处的纵向、横向速度;k1、k2分别为前、后轮胎侧偏刚度;r为汽车横摆角速度;为汽车质心侧偏角。

1.2 建立CarSim整车模型
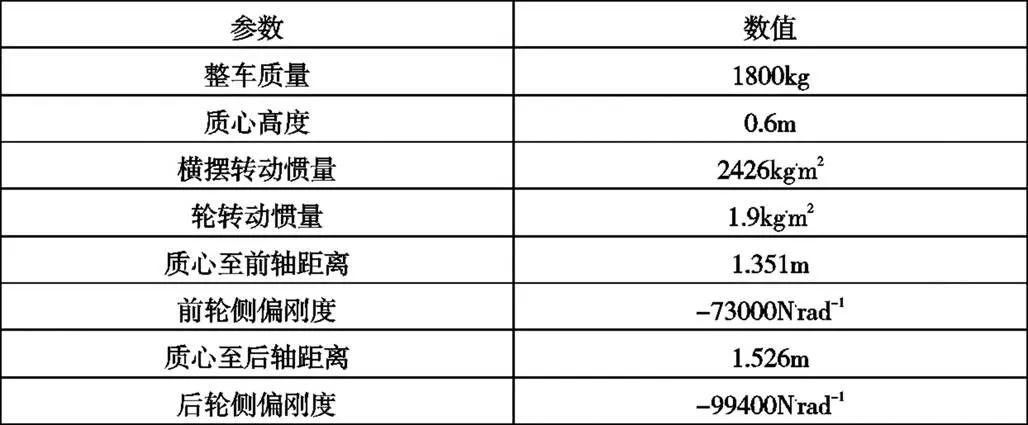
CarSim是一种面向参数化的车辆动力学仿真软件,该软件将整车分为若干子系统,通过选取各部件性能的参数或曲线完成软件建模,能够最大限度的减小了的实体建模中度的误差,使实际的车辆特性与车辆模型更加匹配。选用该仿真软件中的某乘用车模型,该车的主要数据,如表1所示,其余参数采用默认设置。
表1 试验车主要参数
2 乘用车稳定性控制算法
本文采用分层控制,系统分成上层与下层控制器:上层控制器根据CarSim输出的横摆角速度和质心侧偏角与理想横摆角速度和质心侧偏角的值,然后采用模糊PID算法得出车辆稳定所需要的横摆力矩;下层控制器根据△选择对应的车轮进行制动分配。通过车辆的转向特性和地面附着系数,提出单侧控制方式进行制动力矩分配,系统介入时刻根据横摆角速度偏差△与阀值T关系判断,使控制及时有效。该分层控制的结构如图1所示。
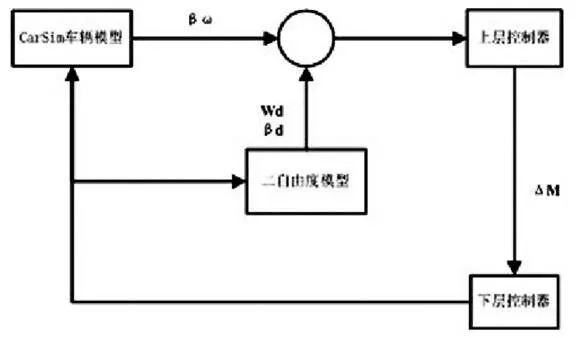
图1 控制器控制框图
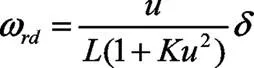
2.1 上层控制器
质心侧偏角超过极限值时,会导致车辆出现失去稳定的情况;而横摆角速度过大时,会导致汽车出现甩尾的情况。因此,当横摆角速度过大而质心侧偏角较小时,PID模糊算法应以控制汽车横摆角速度为主要目标;当质心侧偏角较大而横摆角速度较小时,PID模糊算法应以控制质心侧偏角为主要目标。根据式(3)、(4),在Simulink中搭建二自由度模型,得到理想的横摆角速度与质心侧偏角,与CarSim输出值比较,得到w、β、β、w,均采用PID模糊控制。模糊PID结构图如图(2)所示,模糊PID控制根据输入的E与EC,对p、K、K进行调节,满足ESC的控制要求。模糊PID控制的语言变量模糊集设置为[NB(负大),NM(负中),NS(负小),Z(零),PS(正小),PM(正中),PB(正大)];基于横摆角速度的模糊PID控制算法的输入信号分别为E、EC,其中E的论域为[-0.15,0.15]EC论域[-1,1];基于质心侧偏角PID控制算法的输入信号分别为E、EC,其中E的论域为[-5°,5°],EC的论域为[-1,1];PID控制规律为:

式中:Kp、Ki、Kd为比例系数、积分系数和微分系数;e(t)和ec(t)为误差和误差变化率;u(t)是输出量。
根据式(5)可得△M和△M;对二者产生的
附加横摆力矩进行耦合:

式中,ε为分配系数,且满足
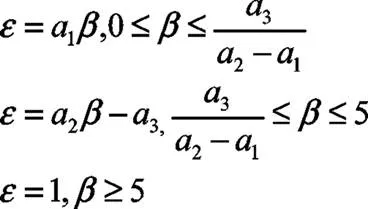
根据式(7)搭建SIMULINK仿真模型。
2.2 下层控制器
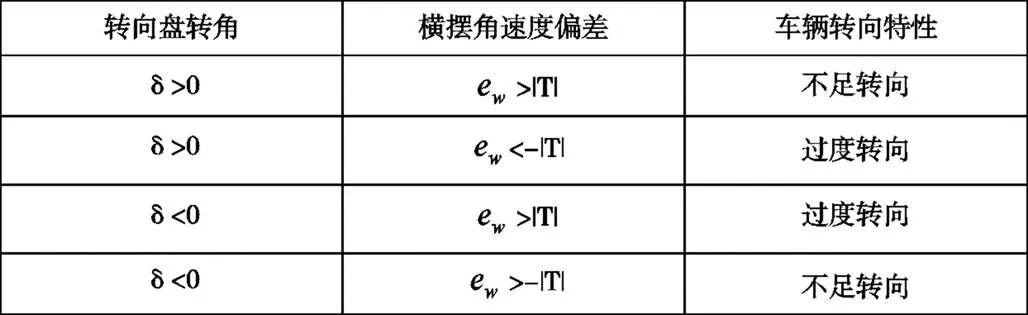
下层控制器的主要目的是实现得到的横摆力矩△,通过判断车辆的转向特性,将△合理分配给对应的车轮,提高车辆的操作稳定性。转向特性是根据前轮转角及横摆角速度判断的,如表2所示。表2中,T是为防止频繁操作。
判断汽车的转向特性,并把△合理分配给对应车轮。制动车轮采用业内认可的单侧车轮制动,出现不足转向,优先制动内侧轮,出现过度转向,优先制动外侧轮。
表2 车辆转向特性判断
左侧车轮控制需满足:
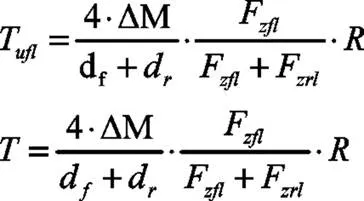
右侧轮控制,需满足:
3 仿真结果分析
在CarSim与Matlab环境下进行联合仿真,仿真工况为在低附的路面上,汽车连续急转弯。分别对单侧车轮制动以及未干涉的汽车进行仿真。
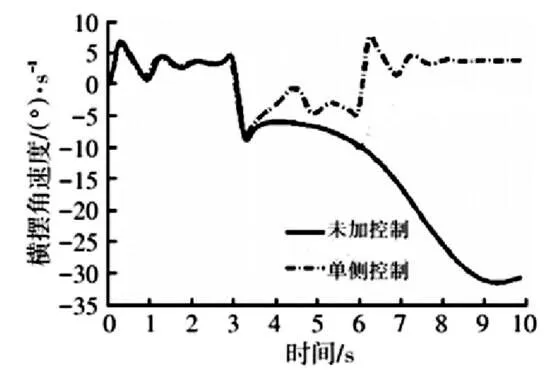
图3 横摆角速度
设置仿真工况参数如下:车速为120km/ h,路面附着系数为0.3,转向角输入幅值为120°正弦信号。图3、图4所示为单侧车轮制动介入和无介入情况下横摆角速度与质心侧偏角对比。由图3、图4可知,本文采用的控制器较好的提高车辆极限工况的横向稳定性。

图4 质心侧偏角
4 结论
本文提出的汽车横向稳定性模糊PID控制法,采用分层控制思路搭建上层与下层控制器,通过CarSim与Simulink的仿真验证了算法的合理性,本文的单侧车轮控制算法对维持车辆在低附路面行驶的横向稳定性起到了一定的效果。
[1] 罗虹,张立双,来飞.车辆直接横摆力矩控制方法研究[J].机械设计与制造, 2010(2):126-128.
[2] 吴刚院,刘丹,陈娟娟.乘用车横向稳定性控制联合仿真[J].汽车技术, 2018.
[3] 卓桂荣.四轮驱动电动汽车关键技术研究[D].2004.
[4] 肖闯.汽车稳定性控制方法仿真研究[D].湖南大学, 2007.
[5] 靳立强,刘刚,陈鹏飞.汽车电子稳定控制系统的分层控制策略及试验[J].吉林大学学报(工), 2016, 46(6):1765-1771.
[6] Yin G D,Chen N,Wang J X, et al. A Study on μ-Synthesis Control for Four-Wheel Steering System to Enhance Vehicle Lateral Stability[J]. Journal of Dynamic Systems Measurement & Control, 2011, 133(1): 011002.
[7] Zheng L,Ye J.Analysis of the Lateral Stability for Four-Wheel Inde -pendent Driving Electric Vehicles[J].Applied Mechanics & Materi -als, 2014, 590:394-398.
[8] Wang W,Fan J, Xiong R, et al. Lateral stability control of four wheels independently drive articulated electric vehicle[C]// Transportation Electrification Conference & Expo. IEEE, 2016.
[9] 王其东[1,2],刘伟[1],陈无畏[1],et al.基于路面识别的汽车稳定系统滑模控制[J].汽车工程,2018.
[10] 孙颖.汽车电子稳定系统控制方法的研究和仿真[D].东北大学,2008.
Joint Simulation of Lateral Stability Control for Vehicle
Li Ranran
( Chang'an University, Shaanxi Xi'an 710064 )
Based on the layered control idea,the upper and lower controllers are built. lateral stability control algorithm based on yaw moment control is designed. The upper controller takes the desired yaw rate and sideslip angle as the target, using fuzzy PID algorithm to get the required yaw moment for vehicle stability.The lower controller brakes the single-sided tire according to the required yaw moment, thereby increasing stability of the passenger car under extreme conditions. Finally, the Matlab/Simulink simulation platform is built. The lateral stability strategy is verified based on CarSim software, and the typical test conditions are selected to determine that the strategy can significantly improve the lateral stability of the vehicle.
Lateral stability control; yaw rate; sideslips angle; joint simulation
A
1671-7988(2019)03-107-03
U462
A
1671-7988(2019)03-107-03
U462
李然然,就读于长安大学,硕士在读,研究方向:智能驾驶与主动安全。
10.16638/j.cnki.1671-7988.2019.03.033
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
新课程·中学(2019年7期)2019-09-17
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
中学课程辅导·教师通讯(2018年10期)2018-09-04
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
