嫦娥卫星数传副瓣信号的干涉测量研究与精度验证
2019-03-07 01:41任天鹏谢剑锋路伟涛韩松涛
载人航天 2019年1期
任天鹏,谢剑锋,路伟涛,陈 略,韩松涛
(1. 北京航天飞行控制中心,北京 100094; 2. 航天飞行动力学技术重点实验室,北京 100094)
1 引言
深空探测器轨道测定主要依靠测距、测速和测角等三种手段,甚长基线干涉测量(Very Long Baseline Interferometry,VLBI)是其中主要的测角手段[1]。通常,VLBI的观测量是群时延,通过相关相位除以干涉带宽得出[2]。干涉带宽即干涉信号在频谱上分布的最大带宽。嫦娥一号与嫦娥二号卫星使用了间距20 MHz的双频点VLBI信标,每个频点的带宽为1 MHz;嫦娥二号卫星实验、嫦娥三号卫星正式使用了最大间距为38 MHz的差分干涉测量(Differential One-way Range,DOR)信号,可得到随机误差为0.1 ns量级的干涉群时延结果[3]。
VLBI时延除了随机误差,还要消除大气、电离层和观测装置时延等系统性误差。为此,需通过交替观测探测器和邻近射电源,即ΔVLBI技术[4]。如果探测器干涉测量采用DOR信号,又称为ΔDOR型VLBI技术。嫦娥二号任务利用VLBI信标和DOR信号,分别开展了ΔVLBI与ΔDOR型VLBI实验,结果表明[5]:采用DOR信号所获时延数据比采用VLBI信标所获时延数据的噪声水平有改善。因此在我国后续月球探测与火星探测卫星中,VLBI将选用DOR信号开展干涉跟踪。
除了VLBI信标和DOR信号,还有探测器向地面发送的科学数据,即数传信号,可用来进行VLBI测量。但由于数传信号主瓣带宽有限,而且其发射时间根据有效载荷而定,不一定能够满足VLBI测轨需求,因而未作为VLBI主用信号[6]。
后续月球探测(包括载人登月)任务中,着陆器落月后有效载荷开启,探测器将发射数传信号。由于数传信号可能影响DOR干涉时延的准确性,因此利用数传信号代替DOR侧音开展干涉测量研究,对探月卫星高精度轨道测定具有重要工程价值。同时,首次火星探测中,DOR信号与数传信号将分时工作,因此开展数传信号干涉跟踪可直接提高干涉测轨的弧段覆盖范围。为此,本文首次将数传副瓣信号(泄露频谱)作为干涉测量对象,开展数传信号干涉测量研究,建立数传副瓣信号干涉测量优化模型,并利用实测数据验证比对了数传副瓣信号干涉时延与传统DOR干涉时延。
2 干涉测量原理与误差建模
2.1 干涉测量原理
干涉测量源于射电天文领域,具有测角精度高、作用距离远等优点,是近年深空导航领研究域的热点[1]。干涉测量技术基本原理如图1所示,两测站接收相同射电源或航天器信号,根据几何关系,相同信号到达两测站的几何时延如式(1):
(1)

图1 干涉测量基本原理Fig.1 Basic principles of interferometry
式中,B表示两个测站的基线,θ为方向夹角,c为光速。
2.2 数传副瓣信号干涉测量优化建模
根据文献[7],干涉条纹的相位误差与信噪比成式(2)所示反比关系:
σφ=1/SNR
(2)
由于双通道干涉时延存在式(3)所示关系,可将双通道干涉时延误差表示为式(4):
(3)
(4)
可见,干涉时延误差与干涉带宽成反比、与信噪比成反比。
嫦娥一号、嫦娥二号任务采用了带宽为20 MHz的VLBI信标(图2),嫦娥二号、嫦娥三号任务采用了带宽为38.4 MHz的DOR侧音信号(图3)。由于VLBI信标和DOR信号辐射强度及干涉带宽为固定值,因此干涉测量中不存在优化建模需求。然而,随着数传副瓣信号(图4)干涉带宽的增加(选取距离主瓣较远的副瓣作为干涉对象),信号辐射强度随之下降;单个副瓣信号内,线性增加有效带宽并不能线性增加信号辐射强度,但是线性增加了处理噪声。因此,需要对数传副瓣信号子瓣有效带宽、数传副瓣信号干涉带宽等进行优化建模。

图2 VLBI信标信号频谱Fig.2 Spectrum of VLBI beacon signal
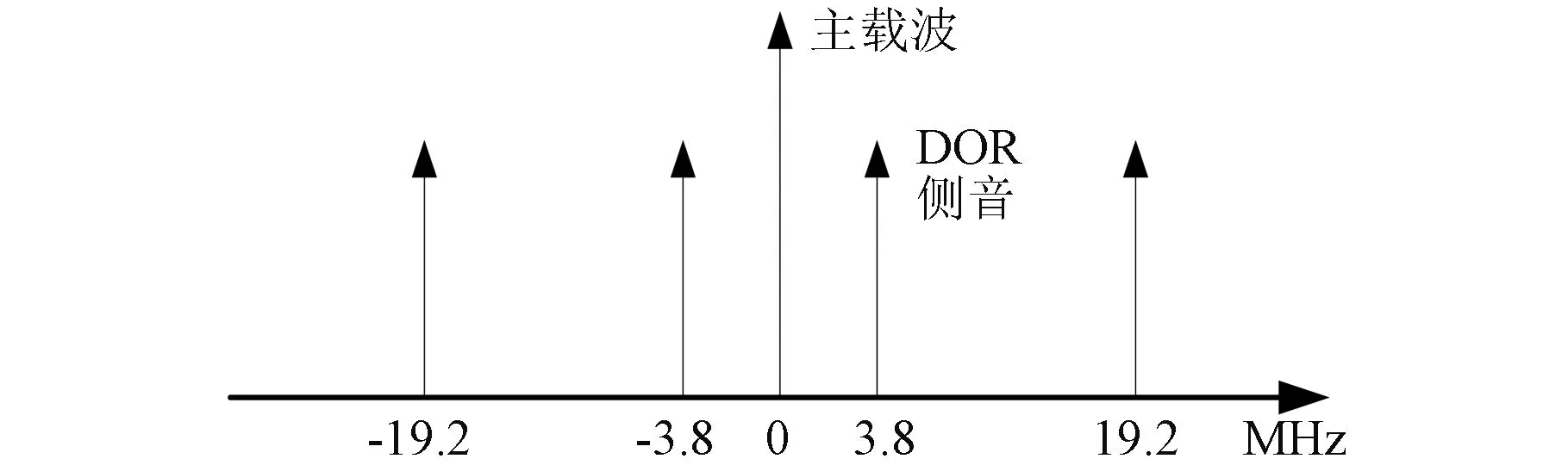
图3 DOR侧音信号频谱Fig.3 Spectrum of DOR signal

图4 数传信号及其副瓣频谱Fig.4 Spectrum of data transmission signal and sidelobe signal
2.2.1 数传副瓣信号子瓣有效带宽优化
航天器宽带信号的干涉信噪比可以表示为式(5)[6]:
(5)
其中,B为信号带宽,eirp表示在带宽B上分配的有效全向辐射功率(EIRP),snr表示影响SNR且与信号带宽B独立的其他因素。
对于单个数传副瓣信号,由于其辐射能量在频谱上并未平坦分布,呈现为中间高边缘低,因此需要针对单个数传副瓣信号,以干涉信噪比最大为目标,建立数传副瓣信号子瓣有效带宽的优化模型如式(6):
(6)
其中,eirpN(B)表示第N个数传副瓣在带宽B上分配的有效全向辐射功率(EIRP)。以嫦娥三号着陆器数传副瓣信号辐射强度作为输入,数值优化结果显示,针对其第2、3、4、5个副瓣,有效带宽均取副瓣带宽的58%时干涉信噪比最大(图5)。稳妥起见,后续分析及实测数据处理中,副瓣有效带宽均取副瓣带宽的50%。

图5 嫦娥三号着陆器数传副瓣信号有效带宽优化Fig.5 Optimization of effective bandwidth for data transmission sidelobe signal of Chang′e-3 lander
2.2.2 数传副瓣信号干涉带宽优化
为取得较宽的干涉带宽,需要选取距离主瓣较远的副瓣作为干涉对象。然而距离主瓣越远,副瓣辐射强度越弱,信噪比越小。因此需要针对数传信号整体,以干涉时延误差最小为目标,建立数传副瓣信号干涉带宽优化模型如式(7):
(7)
其中eirpN(Δf)表示数传信号整体分配给干涉带宽为Δf的数传副瓣的EIRP。以嫦娥三号着陆器数传信号辐射强度在不同副瓣的分布作为输入,数传副瓣信号干涉带宽数值优化结果如图6所示。可知道,取第4副瓣或第5副瓣的干涉测量误差相近。稳妥起见,后续实测数据处理取电平较高的第4副瓣作为干涉对象。

图6 嫦娥三号着陆器数传副瓣信号干涉带宽优化Fig.6 Optimization of interferometric bandwidth for data transmission sidelobe signal of Chang′e-3 lander
3 DOR干涉与数传干涉时延验证比对
利用嫦娥三号(CE03)着陆器下行的DOR信号和数传信号开展DOR干涉时延与数传干涉时延验证实验。CE03着陆器DOR信号包括1个主载波和4个侧音,4个侧音分别距离主载波±19 MHz、±3.8 MHz;数传信号主瓣带宽及左右对称的副瓣宽度均取决于码速率。
不失一般性,DOR信号采用-19 MHz、主载波、+3.8 MHz共3个点频通道(干涉带宽约22.8 MHz);数传信号采用左4副瓣、主瓣、右4副瓣3个宽带通道(干涉带宽约22.5 MHz),其中副瓣有效带宽取50%。干涉带宽相仿条件下,分别解算DOR干涉时延与数传干涉时延,针对随机误差、系统性误差与稳定性(波动误差)进行分析比对。
3.1 随机误差分析比对
利用2017年6月8日CE03着陆器跟踪数据,完成干涉测量数据处理。其中3个点频通道和3个宽带通道的信号频谱与干涉条纹分别如图7、图8所示。

图7 CE03着陆器DOR与数传信号频谱Fig.7 Spectrums of DOR and data transmission signals of Chang′e-3 lander

图8 CE03着陆器DOR与数传信号干涉条纹Fig.8 Interferometric fringes of DOR and data transmission signals of Chang′e-3 lander

图9 DOR信号、数传主瓣、数传第4副瓣干涉时延Fig.9 Interferometric delays of DOR, data transmission mainlobe and sidelobe signals
可以看出,CE03数传信号泄露频谱左4副瓣和右4副瓣干涉条纹亦比较明显,说明其能量足够提取高精度干涉时延结果,可以支撑干涉测量需求。利用实测数据解算干涉时延结果,如图9所示。可以知道:
1) DOR信号通道(-19 MHz、主载波、+3.8 MHz)干涉带宽约22.8 MHz,干涉时延随机误差(STD)约为0.17 ns;
2) 数传主瓣通道干涉带宽约2 MHz,干涉时延随机误差(STD)约为0.79 ns;
3) 数传通道(左4副瓣、主瓣、右4副瓣)干涉带宽约22.5 MHz,干涉时延随机误差(STD)约为0.02 ns。
上述实测结果与理论分析相符:由于干涉带宽较宽,数传干涉时延随机精度优于数传主瓣干涉时延随机精度;由于信噪比较高,数传干涉时延随机精度优于DOR干涉时延随机精度。
3.2 系统性误差分析比对
由于DOR干涉时延与数传干涉时延采用不同的通道进行带宽综合,因此其时延值必定存在一定的差异。而经过射电源差分消除通道间时延差异后,理论上DOR干涉时延与数传干涉时延将相同。基于该原理,本节将利用2018年3月31日与4月1日的CE03着陆器干涉跟踪数据,分别解算基于射电源差分的DOR干涉时延和数传干涉时延,进而评估其系统性误差。
2018年3月31日的干涉时延、差分干涉时延如图10、图11所示,2018年4月1日的干涉时延、差分干涉时延如图12、图13所示。蓝色是DOR通道干涉时延,红色是数传通道干涉时延。可以看出,利用射电源差分观测后,DOR干涉时延与数传干涉时延基本吻合。

图11 2018年3月31日嫦娥三号差分干涉时延(较短红色为数传信号,较长蓝色为DOR信号)Fig.11 Differential interferometric delays of Chang′e-3 lander on March 31, 2018 (data transmission signal: red and short, DOR: blue and long)

图12 2018年4月1日嫦娥三号干涉时延(较短红色为数传信号,较长蓝色为DOR信号)Fig.12 Interferometric delays of Chang′e-3 lander on April 1, 2018 (data transmission signal: red and short, DOR: blue and long)

图13 2018年4月1日嫦娥三号差分干涉时延(较的红色为数传信号,较的蓝色为DOR信号)Fig.13 Differential interferometric delays of Chang′e-3 lander on April 1, 2018 (data transmission signal: red and short, DOR: blue and long)
3.3 稳定性比对
由3.2节可以知道,射电源差分观测消除系统性误差后,DOR干涉时延与数传干涉时延基本吻合,然而并不理想。譬如下行数传信号阶段,DOR干涉时延波动较大;没有下行数传信号阶段,DOR干涉时延较为平稳。本节将以干涉相时延为基准,评估DOR干涉时延与数传干涉时延的稳定性,其原理为:无论群时延还是相时延,均反映了干涉对象的轨道特性,因此群时延与相时延具有一致的趋势性[8]。由于干涉带宽宽,干涉相时延具有公认的高精度优势。因此可以以相时延为基准,可以评估DOR干涉时延(群时延)与数传干涉时延(群时延)的稳定性。
利用2017年6月8日CE03着陆器干涉跟踪数据,分别解算DOR信号与数传信号的干涉相时延(消除电离层延迟影响),则DOR干涉相时延与数传干涉相时延的趋势如图14所示。显然,DOR干涉相时延与数传干涉相时延的趋势几乎完全相同,表明了相时延较低的测量噪声、较高的测量精度等优势。
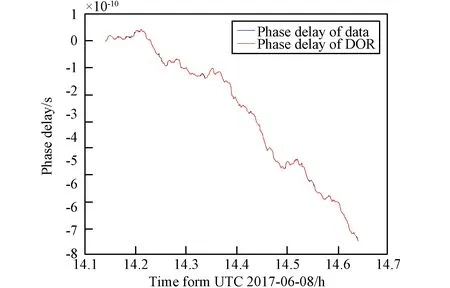
图14 数传干涉相时延(蓝色)和DOR干涉相时延(红色)Fig.14 Phase delays of data transmission signal (blue) and DOR signal (red)
以干涉相时延为基准,分别符合DOR干涉时延和数传干涉时延的变化趋势,如图15~16所示。直观而言,数传干涉时延与干涉相时延的符合性优于DOR干涉时延与干涉相时延的符合性。群时延与相时延的符合差异不同于随机误差与系统性误差,在此称之为波动误差。数据统计结果表明,数传干涉时延波动误差约0.14 ns(STD),而DOR干涉时延波动误差约0.46 ns(STD),说明数传干涉时延的稳定性优于DOR干涉时延。

图15 数传干涉时延及其干涉相时延(蓝色为群时延STD=0.14 ns,红色为相时延)Fig.15 Interferometric group and phase delays of data transmission signal (group delay: blue with STD=0.14 ns, phase delay: red)

图16 DOR干涉时延及其干涉相时延(蓝色为群时延STD=0.14 ns,红色为相时延)Fig.16 Interferometric group and phase delays of DOR signal (group delay: blue with STD=0.46 ns, phase delay: red)
4 结论
干涉带宽相仿条件下,数传信号干涉时延随机误差约0.02 ns(STD),优于DOR干涉时延0.17 ns(STD)的随机误差;利用射电源差分观测后,DOR干涉时延与数传干涉时延基本吻合;以干涉相时延为基准,数传干涉时延的波动误差约为0.14 ns(STD),DOR干涉时延的波动误差约为0.46 ns(STD),说明了数传干涉时延的稳定性优于DOR干涉时延。
因此,在探测器下行数传信号的观测弧段,可以利用数传信号代替DOR信号开展干涉跟踪与测量试验,以获取精度更高、稳定度更优的干涉时延数据。同时,DOR干涉时延的波动误差来源有待进一步探究。
猜你喜欢
学与玩(2022年6期)2022-10-28
电脑知识与技术(2021年22期)2021-09-14
电脑知识与技术(2021年22期)2021-09-14
金桥(2021年1期)2021-05-21
初中生世界·七年级(2021年3期)2021-05-14
航天器工程(2019年4期)2019-11-11
英语文摘(2019年4期)2019-06-24
花火B(2019年3期)2019-04-27
电子制作(2019年23期)2019-02-23
伙伴(2019年12期)2019-01-17