
基于形状先验水平集方法的虹膜分割研究
2019-03-14 12:42张文娟蒋阿娟
电脑知识与技术 2019年1期
张文娟 蒋阿娟


摘要:虹膜分割是虹膜识别系统中最重要的部分,当虹膜图像受上下眼睑、光照、睫毛及变形等影响时,会造成分割不准确。根据先验知识瞳孔与虹膜近似同心且半径有一定比例关系。先对图像进行二值化处理,确定瞳孔圆心与半径,估算虹膜半径,在水平集分割模型中,当曲线轮廓半径大小远大于虹膜半径时,引入局部全局信息,加速曲线演化。通过计算各点周围灰度分布均匀强度,自适应调整局域半径大小。
关键词:瞳孔分离;水平集;局部全局信息;虹膜分割;局域半径
中图类号:TP391 文献标识码:A 文章编号:1009-3044(2019)01-0209-03
Iris Segmentation Based on Shape Prior Level Set Method
ZHANG Wen-juan , JIANG A-juan
(Anhui University of Science and Technology,Huainan 232000,China)
Abstract: Iris segmentation is the most important part of the iris recognition system. When the iris image is affected by the upper and lower eyelids, illumination, eyelashes and deformation, it will cause inaccurate segmentation. According to prior knowledge, the pupil is approximately concentric with the iris and has a proportional relationship with the radius. Firstly, the image is binarized to determine the center and radius of the pupil, and the iris radius is estimated. In the horizontal set segmentation model, when the curve contour radius is much larger than the iris radius, local global information is introduced to accelerate the curve evolution. The local radius is adaptively adjusted by calculating the uniform intensity of the gray distribution around each point.
Key words: pupil separation; level set; local global information; iris segmentation; local radius
1引言
圖像分割是图像处理的重要环节。可以根据纹理、灰度、颜色和形状将其分成多个具有独特性质的区域,然后从中对感兴趣的区域作进一步图像处理。图像分割是图像处理到图像分析的关键步骤。近年来,水平集方法凭借其可拓扑性较好的分割结果,得到国内外研究人员的广泛关注。水平集方法最初是由美国的两位数学家osher和Sethian等人提出,其主要思想是通过构造能量泛函集成高层知识和图像数据将界面看成是高一维空间中某一函数的零水平集,然后求解泛函极值使得泛函最小化。具体的方法是通过推导拉格朗日方程将变分问题转化为偏微分方程求解问题。在算法演化分割过程中,可以通过结合图像的先验知识,在算法中引入图像边界信息、灰度信息增强其鲁棒性,提供光滑的封闭轮廓作为分割结果,因其形式多样、结构灵活等优越性能被广泛使用。
虹膜识别因其具有唯一性稳定性等特点,被作为人体身份标识之一,受到国内外越来越多的研究者关注。虹膜特征的提取主要在于虹膜能否精确的定位分割,其分割优劣关系到后续结果的研究与分析。一般受复杂的采集环境,容易造成光线强度不一致、上下眼睑的遮挡、拍摄角度造成的模糊、斜视等影响分割复杂。虹膜外边缘搜索过程复杂,耗时较多,且存在偏差。而虹膜内边缘,一般受眼睑、睫毛等影响较小但其易发生收缩或扩张。本文提出先确定瞳孔圆心和半径即虹膜的内边缘。在根据先验知识,引入局部全局信息的水平集模型,实现虹膜外边缘的准确快速分割。
2虹膜定位
人的眼睛结构由虹膜、巩膜、瞳孔晶状体、视网膜等部分组成。虹膜是位于黑色瞳孔与白色巩膜间的环形可视部分,虹膜定位就是确定虹膜的内外边缘。但通常一幅采集到的虹膜图像中不仅包括虹膜,还会包括眼睛的其他部分,比如巩膜、眼睑、睫毛等等。根据先验知识虹膜与瞳孔近似同心。首先根据瞳孔的圆心和半径,确定虹膜的内边缘,然后确定虹膜外边缘
2.1传统方法
Wilds等人提出的虹膜识别系统使用了图像强度的一阶微分来表示与虹膜边界相应的边缘位置。由于图像强度的局部变化图像边界上微分的大小会出现一个局部最大的值,使用圆形模板为虹膜内边缘和外边缘建模。一般轮廓定位分两步完成,首先,图像的强度信息通过基于梯度边缘检测方法转换成一幅二元边界图;然后用边缘点选取轮廓参数值。
用I(x,y)表示虹膜图像,定义虹膜图像边界点集合如下:
由上式,得到虹膜图像边界点集合后,对其进行Hough变换,求得内外边界参数。在图像直角坐标系中定义一个圆心和半径均可变化圆C(x0,y0)为圆心在I(x,y)中的坐标,r为半径。将得到的参数进行适当的离散化,列举出图像中所有可能的圆,将边界点数目进行统计为:
[N(x0,y0,r)=(x,y)∈cHx0,y0,r(x,y)(x0,y0,r)∈D] (2)
其中,D是在离散化后可能出现的参数值集合。这个过程可以看作是平面直角坐标域E(x,y)到几何模型参数[N(x0,y0,r)]域的一个变换,称为Hough变换。
[N(x0,y0,r)=Hough(E(x,y))] (3)
通常可以把经过边界点数最多的圆认为是与边界最吻合的圆。但是Hough变换的过程,存在三个变量计算量较大。另外在边缘检测中,因噪声等干扰信息,会检测出很多非虹膜的边缘,会给Hough变换方法运算的速度和精度带来不利。
2.2本文模型
2.2.1分离瞳孔
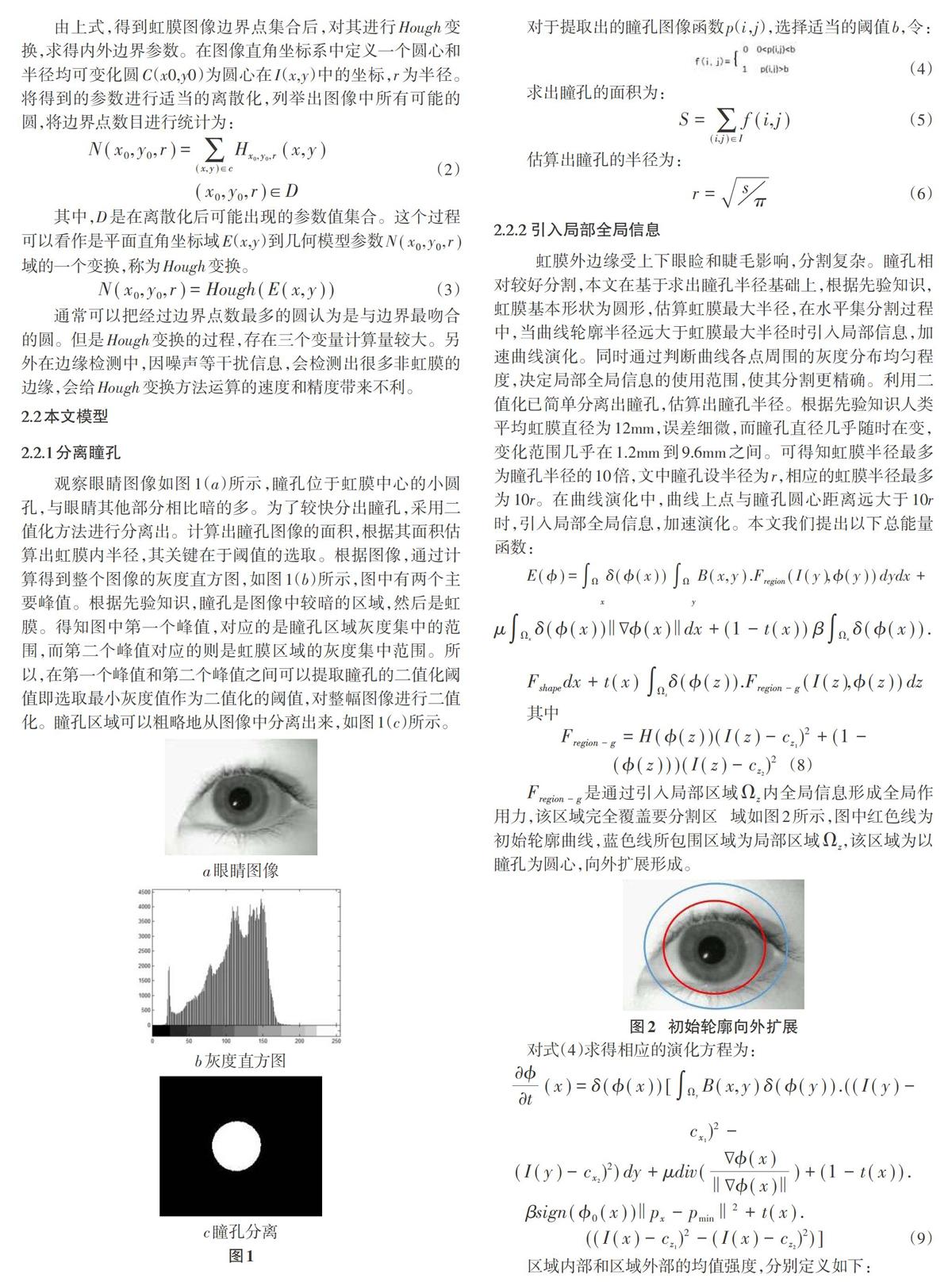
观察眼睛图像如图1(a)所示,瞳孔位于虹膜中心的小圆孔,与眼睛其他部分相比暗的多。为了较快分出瞳孔,采用二值化方法進行分离出。计算出瞳孔图像的面积,根据其面积估算出虹膜内半径,其关键在于阈值的选取。根据图像,通过计算得到整个图像的灰度直方图,如图1(b)所示,图中有两个主要峰值。根据先验知识,瞳孔是图像中较暗的区域,然后是虹膜。得知图中第一个峰值,对应的是瞳孔区域灰度集中的范围,而第二个峰值对应的则是虹膜区域的灰度集中范围。所以,在第一个峰值和第二个峰值之间可以提取瞳孔的二值化阈值即选取最小灰度值作为二值化的阈值,对整幅图像进行二值化。瞳孔区域可以粗略地从图像中分离出来,如图1(c)所示。
对于提取出的瞳孔图像函数p(i,j),选择适当的阈值b,令:
求出瞳孔的面积为:
[S=(i,j)∈If(i,j)] (5)
估算出瞳孔的半径为:
[r=sπ] (6)
2.2.2 引入局部全局信息
虹膜外边缘受上下眼睑和睫毛影响,分割复杂。瞳孔相对较好分割,本文在基于求出瞳孔半径基础上,根据先验知识,虹膜基本形状为圆形,估算虹膜最大半径,在水平集分割过程中,当曲线轮廓半径远大于虹膜最大半径时引入局部信息,加速曲线演化。同时通过判断曲线各点周围的灰度分布均匀程度,决定局部全局信息的使用范围,使其分割更精确。利用二值化已简单分离出瞳孔,估算出瞳孔半径。根据先验知识人类平均虹膜直径为12mm,误差细微,而瞳孔直径几乎随时在变,变化范围几乎在1.2mm到9.6mm之间。可得知虹膜半径最多为瞳孔半径的10倍,文中瞳孔设半径为r,相应的虹膜半径最多为10r。在曲线演化中,曲线上点与瞳孔圆心距离远大于10r时,引入局部全局信息,加速演化。本文我们提出以下总能量函数:
[E(?)=Ωxδ(?(x))ΩyB(x,y).Fregion(I(y),?(y))dydx+]
[μΩxδ(?(x))∥??(x)∥dx+(1-t(x))βΩxδ(?(x)).]
[Fshapedx+t(x)Ωzδ(?(z)).Fregion-g(I(z),?(z))dz]
其中
[Fregion-g=H(?(z))(I(z)-cz1)2+(1-(?(z)))(I(z)-cz2)2] (8)
[Fregion-g]是通过引入局部区域[Ωz]内全局信息形成全局作用力,该区域完全覆盖要分割区 域如图2所示,图中红色线为初始轮廓曲线,蓝色线所包围区域为局部区域[Ωz],该区域为以瞳孔为圆心,向外扩展形成。
对式(4)求得相应的演化方程为:
[???t(x)=δ(?(x))[ΩyB(x,y)δ(?(y)).((I(y)-cx1)2-]
[(I(y)-cx2)2)dy+μdiv(??(x)∥??(x)∥)+(1-t(x)).]
[βsign(?0(x))∥px-pmin∥2+t(x).]
[((I(x)-cz1)2-(I(x)-cz2)2)]] (9)
区域内部和区域外部的均值强度,分别定义如下:
[cz1=ΩzH(?(z)).I(z)dzΩzH(?(z))dz] (10)
[cz2=Ωz(1-H(?(z))).I(z)dzΩz(1-H(?(z)))dz] (11)
在判断演化轮廓上各点距离瞳孔圆心大小时,无须计算每点的距离,计算每点邻近点以减少计算量。当点与瞳孔距离远大于10r时,引入全局信息加速演化,而小于或接近10r时,此时利用各像素点周围的灰度分布均匀程度动态自适应的调整局域半径大小,进而精确快速地分割。在局域半径大小选择上初始局域半径设为r0,根据公式(10)(11)计算各点内部与外部均值强度差的绝对值,当其差较大时,说明该点周围分布极不均匀,此时应相应减小局域半径。当其差较小时,说明该点周围分布均匀,此时应相应增加半径加速其演化。如图3所示:
为减少计算量大的问题,本文使用相邻像素点使用中间像素点计算局域能量。因为像素点相邻其局域能量相差微小,这样在计算时可以节省时间,提高其分割效率。
3 实验结果与分析
实验在MATLABR2014a环境下编程实现,对CASIA数据库的虹膜图像进行虹膜分割,数据库包括249人左右眼睛,因每人左右眼差异。本文对数据库中的498幅虹膜图像进行分割,作为测试集。在不同光照,受上下睑和睫毛變形等影响下仍可以准确分割出虹膜内边缘和外边缘,图4中ab两张图像是在不同光照下,上下眼睑张开程度大小不同条件下分割的结果。从图中可以看出,本文提出的算法在分割虹膜内边缘时尽管瞳孔发生变化,收缩或扩张都可以准确分割。而经典Hough变换方法在分割虹膜外边缘,由于假设外边缘是圆形或椭圆形经常出现误差。而本文方法采用的结合先验知识,引入局部全局信息可以很好的根据虹膜实际图像,精确分割出虹膜外边缘。
对于数据库 中的498幅虹膜图像,依次采用经典方法Daugman方法、Hough方法、基于变分水平集方法和本文提出的方法进行虹膜分割,然后就其平均耗时,外边缘和内边缘分割准确率进行对比。由表1可见,本文方法优于其他三种算法。
4 结束语
由于成像设备的环境及人物的不同特征。本文针对不同姿态的虹膜分割,提出一种基于先验知识引入局部全局信息的水平集方法。采用二值化方法分离瞳孔根据先验知识估算虹膜半径。判断轮廓上点与虹膜距离的远近,相差较远时,引入局部全局信息加速其演化。当轮廓演化趋于虹膜近时,计算各点的内外灰度均值强度差,自适应调整局域半径,使其可以准确快速地分割。该模型可以较好地克服图像中噪声干扰、光照变化、瞳孔区域缩放等影响。但此模型以分离瞳孔为基础,当虹膜圆心与瞳孔圆心相差较多时,分割会有一定误差。在引入局域全局信息时,局域半径的自适应调整大小需进一步改进。今后将针对虹膜质量较低的图像,在保证准确性基础上进一步提高分割效率,以获得更加准确高效的分割结果。
参考文献:
[1] 廖祥云,袁志勇,郑奇,等.引入局部全局信息的区域自适应局域化快速活动轮廓模型[J].计算机学报,2016,39(7):1464-1476.
[2] Kennedy J E.High-intensity focused ultrasound in the treatment of solid tumours.Nature Reviews Cancer,2005,5(4):321-327.
[3] 范立南,欧文杰,孙申申,等.基于圆形保持水平集方法的虹膜分割研究[J].计算机应用研究,2014,31(4):1229-1235.
[4] 张荷萍,徐效文.基于变分水平集模型的虹膜图像分割方法[J].计算机工程,2013,39(10):251-253.
[5] Daugman J G.How Iris Recognition Works[J].IEEE transactions on Circuits and Systems for Video Technology,2004,14(1):21-30.
[6] Orsi F,Arnone P,Chen W,Zhang L,High intensity focused ultrasound ablation:A new therapeutic option for solid tumors.Journal of Cancer Research and Therapeu-Tics,2010,6(4):414-420.
[7] Kass M,Witkin A,Terzopoulos D.Snakes:Active contour models.International Jour- nal of Computer Vision,1988,1(4):321-331.
[8]Chan T F,Vese L A.Active contours without edges.IEEE Transactions on Image Processing,2001,10(2):266-277.
