
基于非正交轴系架构的新型坐标测量系统解决方案
2019-03-20 11:51白芝勇
中国锰业 2019年1期
王 涛,李 梅,白芝勇
(1. 陕西铁路工程职业技术学院,陕西 渭南 714099; 2. 中铁一局集团第五工程有限公司,陕西 宝鸡 721006)
1 非正交轴系全站仪坐标测量系统原理分析
1.1 系统结构特征分析
在非正交轴系全站仪坐标测量系统中,其基础为非正交轴系测量单元,该单元由一维电控旋转台、激光测距仪组成,这两个组成部分互相独立,其中电控旋转台的数量可以根据实际条件来进行选择,通常数量为2个,而激光测距仪数量则始终为1。在结构部署上,一维电控旋转台的旋转中心轴线并不会与激光测距仪光束相接触,所以两者之间不存在正交关系。在上述条件下,当非正交轴系全站仪坐标测量系统运行时,其垂直轴会保持静止状态,而水平轴与视准轴则围绕垂直轴进行垂直旋转,此时即可对测量范围内的任何方向进行测量。
针对非正交轴系全站仪坐标测量系统的视准轴进行分析。视准轴是调节系统测量方向的重要结构,其姿态表现能够帮助测量人员对准测量目标,但在对视准轴的姿态进行调节之前,需要先进行测量单元装配工作,即先对测量单元垂直轴、水平轴姿态进行调整,当两者每一条轴线的位姿态都满足要求之后,即可对视准轴进行调整。此外,针对测量单元结构,其主要包含了3个空间节点P、C、O;3个单位方向向量L、H、V;18个结构参数(具体见图1)。
针对非正交轴系全站仪坐标测量系统的系统结构进行分析,其主要由主控机、测量单元、测量激光、被测目标组成,其中主控机通过线路对系统的转台控制箱进行控制,连带实现测量单元控制,当测量单元受控旋转之后,再依靠主控机的蓝牙线路对测量激光进行控制,在这两个控制条件下,即可对被测目标进行准确控制。
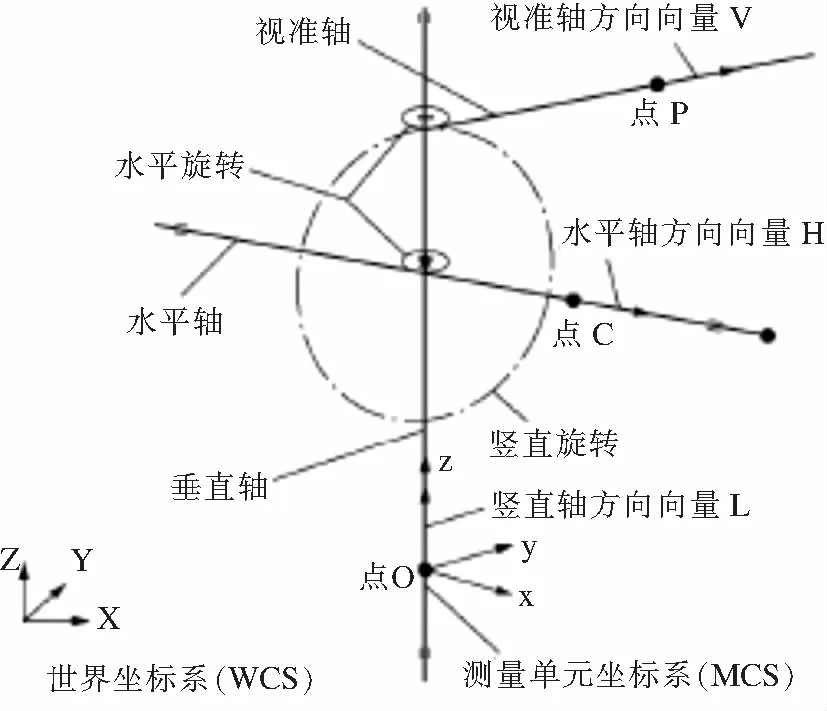
图1 非正交轴系测量单元结构参数
1.2 系统测量模型构建
为了给之后测量提供便利,在此处进行系统测量模型构建工作。构建当中首先针对测量单元的水平旋转,设定水平轴与视准轴围绕垂直轴旋转的角度为θ;水平轴初始单位方向向量为Ho,那么在Ho基础上选择点C的初始坐标为Co,则在水平旋转过程中水平轴的动态单位方向向量Hd与点C的动态坐标Cd见公式(1)、公式(2)。
Hd=RhH0
(1)
Cd=RhC0
(2)
式中,Rh代表水平转台绕垂直轴转动的变换矩阵;矩阵表达式见公式(3)。
(3)
Vd-h与Pd-h分别代表水平旋转条件下,视准轴动态单位方向向量与轴上定点的动态坐标,计算见公式(4)、公式(5)。
Vd-h=RhV0
(4)
Pd-h=RhP0
(5)
最终结合相关理论获取非正交轴系测量单元的运动学模型,通过该模型可以求得上述中的Vd、Pd,在此条件下对激光测距仪光束进行调整,当其校准目标点后可以取得目标点的测距值,通过测距值可求得空间目标点的坐标,具体计算方法见公式(6)。综合公式(4)~(6)即可获得非正交轴系全站仪系统的测量模型。
G(x,y,z)=Pd+(L-L0)·Vd
(6)
式中,G代表目标点;L代表目标点测距值;L0代表系统标定时视准轴上固定点的测距值。
2 系统的误差分析
2.1 误差分量
因为本文系统的测量单元三轴之间没有正交关系,所以在分析当中不需要对装配误差影响进行考虑,主要针对测量单元转台的转角误差、激光测距仪的测距误差进行分析,具体如下文所述。
1)转台的转角误差
出于实践性考虑,本文主要以RAK 1 000型号的精密旋转台作为转台的转角误差分析基础,该精密旋转台的参数为:分辨率0.001 25(°)、重复精确定位0.005(°)。采用多面棱体、光电自准直仪来开展误差分析工作,结果显示转台的转角误差具体参数、位置存在随机性,而角度值不确定度为0.055(°)。
2)激光测距仪的测距误差
出于实践性考虑,本文主要以Leica DISTO A6型号的激光测距仪作为激光测距仪的测距误差分析基础,该激光测距仪的参数为:测量距离0.05~200 m,30 m内测量精度±1.5 mm,激光点的直径6,30,60 mm。测试主要采用GUMB类评定法,主要确认该仪器的测距值不确定度,结果显示测距值的标准不确定度为0.866 mm。
2.2 系统测量不确定度
结合上述测量模型进行分析,模型当中的Lo可以作为分析中的常数,而Vd、Pd则因为系统运行原理,会随着转角而发生相应的变化,说明其具有不确定性,可以作为测量基础。在此条件下本文将水平角θ、垂直角φ和被测点测距值L作为分析输入量代入数学模型当中,使三者进行不确定性合成,最终得到测量不确定度。测量方法见公式(7)。
uG=(JGeG)T(JGeG)
(7)
式中,JG代表测量函数对水平角θ、竖直角φ和被测点测距值L输入量求偏导所得到的雅克比矩阵;eG代表水平角θ、竖直角φ和被测点测距值L的不确定度。JG、eG的表达式见公式(8)、公式(9)。
(8)
eG=[uθ,uφ,uL]
(9)
结合上述公式即可开始计算,但本文出于实践性考虑,将代入实际参数,参数见表1。

表1 非正交轴系全站仪坐标测量系统参数 mm
3 仿真分析
主要结合MATLAB仿真软件进行,将表1数据代入公式(7)进行计算,通过此项计算可以得到非正交轴系全站仪系统在不同测距值条件下的点位测量不确定度,见图2~3[1]。
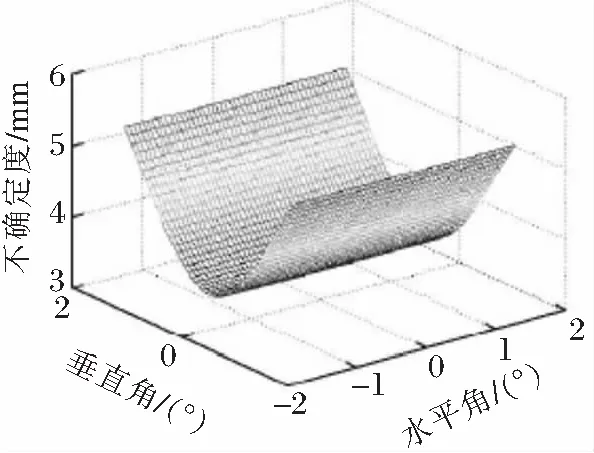
图2 测距值3 m点位测量不确定度分布

图3 测距值5 m点位测量不确定度分布
结合图2、3进行分析可见,当非正交轴系全站仪坐标测量系统出于目标点、系统距离不变条件下,其水平角的变化不会对测量不确定造成影响(实际存在影响,但几乎可以忽略),但其测量不确定度会因为垂直角绝对值变化而发生相应变化,即垂直角绝对值增大,则不确定度相应增大,另外当进入归零位时,其测量不确定度最小。
此外,当非正交轴系全站仪坐标测量系统处于测距值3 m条件时,其测量不确定度会发生相应的变化,变化范围大约为3~5 mm;,测距值5 m时,测量不确定度发生了变化,变化范围大约为1.5~2.5 mm。因此得出结论:在水平和垂直角不变时,测量不确定度随着L-L0的增大而增大,说明其存在误差。
4 解决方法
针对上述分析结果,说明非正交轴系全站仪坐标测量系统,会因为条件变化而产生误差,所以为了避免误差影响,需要在测量工作当中采用相应方法来进行处理。
4.1 距离数据收集工作
现在任意位置设置非正交轴系全站仪坐标测量系统,再根据设置实际条件通过人工测量得出两个已知点,之后将任意点与两个已知点以三角形形式连接即可。连接之后,因为两个已知点的坐标已经被确认,所以通过相关公式可以求得两点的间距,最终启用全站仪对三角形布设的其他边进行测量,即得到其他边的距离。两点间距计算公式如公式(10)所示[2]。
(10)
式中,D3代表两点间距,(x1,y1)、(x2,y2)分别表示两测点水平轴的横、竖坐标。
4.2 三角夹变计算
在上述基础上,已经得到了三角形所有边的距离,那么就可以结合相关公式对三角形的3个夹边进行计算。三角形3个夹边计算方法如公式(11)。
(11)
式中,A代表夹角角度;a,b,c代表每个夹角两边距离。
4.3 坐标方位角计算
采用常规坐标方位角方法进行计算,因常规方法应用广泛,所以不多加赘述。根据计算结果可以得到直线双向的坐标方位角。根据计算结果进行判断,如果结果显示大于360(°),那么就需要采用结果减去360(°);如果为负值,则需要加上360(°),最终结果即为准确的坐标方位角[3]。
4.4 坐标计算
根据公式(12)可以对测量点的坐标进行计算,通过此计算结果,减去上述误差分析中的计算结果即可得到两者之间的误差差值,之后围绕对全站仪进行调整即可消除误差[4]。
XEXA+DAE·cosaAE
(12)
YEYA+DAE·sinaAE
式中,X,Y代表测点水平轴的横、竖坐标;E代表测点;D代表坐标方位角。
4.5 注意事项
虽然上述方法能够消除误差影响,但在使用当中还需要重视相关事项,具体包括全站仪参数调整、棱镜调整、测量规则。
1)全站仪参数调整
在许多测量当中,经常出现全站仪参数误差现象,此类误差通过任何计算方法都很难消除,因为其出于根本性误差,所以在测量之前有必要对全站仪当前参数进行确认,如果发现某项参数出现了问题,则需要及时进行调整,例如仪器常数、棱镜常数等。此外,还要注意测距是否处于合理区间,如果超出也要进行调整。
2)棱镜调整
棱镜调整方面,除了要对上述常数项进行调整以外,还要注意棱镜中、水平面是否平整,如果不满足上述要求,那么会对之后的测量产生误导影响,间接导致测量结果误差。
3)测量规则
在满足上述两个条件下可以进行测量,但测量不可取一次性结果,需要反复测量3次,取其中均值为最终结果。
5 结 语
非正交轴系架构的新型坐标测量系统存在误差,虽然影响不大,但是依旧有必要进行改善。针对相关理论提出了非正交轴系架构的新型坐标测量系统误差处理方法。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
新型工业化(2022年5期)2022-06-17
防爆电机(2022年3期)2022-06-17
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
科学(2020年3期)2020-01-06
船舶标准化工程师(2019年4期)2019-07-24
电子制作(2017年7期)2017-06-05
现代职业教育·中职中专(2016年4期)2016-10-21
舰船科学技术(2016年1期)2016-02-27
