
正矢差闭合的曲线轨道拨距计算方法
2019-03-24 01:25魏晖魏昱朱洪涛
铁道科学与工程学报 2019年7期
魏晖,魏昱,朱洪涛
正矢差闭合的曲线轨道拨距计算方法
魏晖1, 2,魏昱3,朱洪涛4
(1. 江西科技学院 汽车工程学院,江西 南昌 330098;2. 江西科技学院 协同创新中心,江西 南昌 330098;3. 江西省建筑设计研究总院,江西 南昌 330046;4. 南昌大学 机电工程学院,江西 南昌 330031)
针对目前的绳正法在拨距计算中存在首尾端正矢不易闭合的问题,提出一种基于追赶法的曲线拨距计算方法。该算法以中点弦测法表征曲线平顺性状态,通过对合理的设置边界条件,可将拨距求解的不定方程转化为适定方程,并保证曲线首尾端拨距为0;然后考虑到其系数矩阵是三对角对称阵,利用追赶法构造一种以平顺性为输入的拨距计算方法并分析其算法性能,认为:基于追赶法的拨距计算方法,以正矢为输入计算拨距,避免了坐标的测量,有利于提高作业效率;相比于绳正法,其首尾端闭合,并具有良好的算法性能。仿真结果显示,该方法对正矢偏差的控制能力较好,适合于高速铁路曲线轨道的临时补修。
铁道工程;曲线整正;中点弦测模型;数值计算;追赶法

截至2017年底,我国高速铁路运营总里程已逾2.5万km,占世界高铁总里程的66.3%。高速铁路发展已经由大规模建造逐步进入长期安全运营管理与维护阶段,高速铁路研究与技术创新的主题也由新线的设计与建造转向既有线的运营与维护。而运营与维护的一个关键性工作就是持续保持轨道的高平顺性。曲线作为轨道三大病害多发位置,其平顺状态对列车安全、舒适、快速的运营有着重要的影响。与直线轨道相比,曲线轨道的几何形位关系更加复杂,轮轨相互作用更为强烈[1]。而轨道作为巨型工程结构物,其具有的材料属性、结构层次、空间跨度和服役环境的复杂性,使得持续保持曲线轨道平顺的几何状态殊为不易。曲线轨道几何状态可用轨向(正矢)、高低、轨距和水平(超高)等尺寸参数描述,其在列车重复性载荷作用下,不可避免发生劣化,因此需周期性地检查轨道的几何尺寸,必要时予以校正,而校正的过程即为曲线整正。曲线整正作业涉及线路测量、作业规划、轨道施工以及作业回检等操作,过程中通过线路测量获得轨道几何尺寸数据,通过作业规划合理地确定整正作业的整正量(或拨距)。线路测量一般有绝对测量与相对测量2类,相应拨距的计算依据输入常规有2类方法:坐标法[2]与渐伸线法[3−4]。坐标法的拨距由轨道的横、垂向偏差等外部几何尺寸所确定,但测量横垂偏需联测CPⅢ网,外业工作量大,设备要求高,故往往用于高速铁路的综合维修。渐伸线方法是一类经典的计算拨距方法,其认为曲线上任一点拨动时均沿渐伸线方向移动且拨动前后曲线长度不变,而拨距则解释为设计曲线渐伸线长度'与实测曲线渐伸线长度之差[3]。渐伸线长度可由偏角法或绳正法计算,其中绳正法通过内部几何尺寸(正矢)计算渐伸线长度,外业操作简单,设备要求低,因此常用于普速铁路的经常保养与临时补修[5]。然而绳正法应用于高速铁路,存在作业精度不高的问题[6−7],其中一个关键性问题,正矢差合计不闭合,其结果将导致在曲线尾端易出现鹅头或反弯。此问题虽可通过修正计划正矢予以修正,但不可避免地破坏了曲线的平顺性。即便考虑到高速铁路轨道病害是局部的,这种不闭合依然不可接受。能否通过内部几何尺寸计算拨距,改善曲线的平顺性状态并保证曲线首尾端闭合。这一问题对于高速铁路的运营与维护具有重大的现实意义。本文认为,在一定意义上,拨距计算问题等价于对表征曲线状态的非齐次方程组求解;并且,工务维修中高速铁路轨道不平顺的发生往往是局部的。基于以上认识与事实依据,本文首先通过中点弦测模型表征曲线平顺性状态,并讨论不同边界条件下的拨距求解问题;然后在首尾端拨距为0条件下引入追赶法,构造一种正矢差闭合的拨距计算方法并讨论其算法性能,最后对算法的整正效果进行仿真验证。
1 曲线状态表征及经典曲线整正方法
1.1 曲线平顺性状态的表征及曲线正矢
曲线状态与其轨道几何参数密切相关,目前在高速铁路常通过横、垂向偏差控制轨道平顺性状态。横、垂向偏差属于轨道外部几何参数[8],可通过对轨道位移函数进行最小二乘拟合[9−10]或纵向偏差等模型[2]计算。然而,由于外业的开销,坐标法用于高速铁路养护维修存在天然的不足。
与此同时,曲线的平顺性还可用正矢来表征。正矢是一类轨道内部几何参数[8],为钢轨踏面下16 mm处作用边侧的20 m弦的中点矢距,忽略转向角与弧弦差的影响,正矢可表达为

其中:v为测桩处的现场正矢,mm;f为测桩处的现场横向位移函数,mm;为测桩编号,=0,1,2…,测桩间隔10 m。如令F为曲线计划横向位移函数,可类似定义曲线的计划正矢V/mm,正矢差Δv/mm与横向偏差Δf/mm如式(2)。
采用式(1)所示的中点弦测法定义的轨道不平顺具有一系列良好的特性[11−12],因此,以轨向、高低及正矢为代表中点矢距常用于轨道状态的评价。由式(1),可以采用一组非齐次方程表达曲线的平顺性状态,如式(3):
其中


显然−Δ即为拨距,此时,曲线拨距计算转变为已知Δv求解Δf的问题。然而,式(3)中Δv与Δf分别为×1维和(+2)×1维向量,为一非齐次的欠定线性方程组。此类方程存在无穷多解,其解Δ的结构包含一个非齐次方程组的特解Δ*与对应齐次方程组的通解δ,如式(4)。
1.2 拨距计算的求逆方法与绳正法的实质
由式(3)易知,Rank()=,存在个基本未知量与2个自由未知量,因此要由Δ得到Δ需要引入不少于2个的横向偏差Δf和Δf,即需联测CPⅢ网观测至少2点。考虑到一般情况下高速铁路轨道的横向偏差不大,可假定边界条件,计算非齐次方程组的特解Δ*作为Δ,并将−Δ作为拨距。2个自由未知量的选择不唯一,通常可假定曲线起始2点Δ0=Δ1=0或首尾端2点Δ0=Δf1=0,如此拨距相应可采用求逆、消去以及迭代的方法[13]计算。
如假设Δ0=Δ1=0,则
其中


则

其中系数矩阵的逆为
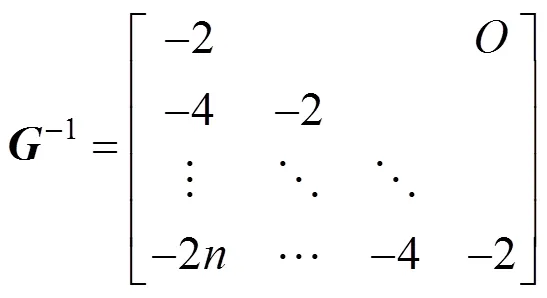
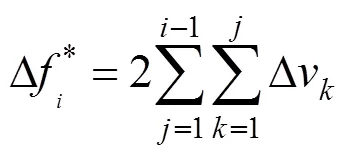
由式(6)可得Δ0=Δ1=0条件下的特解,若写作累和形式,即
对比文献[3]可知,其即为绳正法,其实质是在Δ0=Δ1=0条件下求逆计算式(3)的特解Δ*。作为曲线整正的经典方法,绳正法存在以下问题:
其假定Δ0=Δ1=0,即曲线起点及切线方向不变,当现场存在碎弯时假定不易满足;
计算次序按=2,3,…,+1,当Δv存在误差,其将向后累积,进一步使得首尾端正矢差合计与正矢差累计不闭合[6−7]。
2 一种正矢闭合的曲线整正方法
2.1 边界条件及系数矩阵的Crout分解
绳正法未对曲线终点的拨距进行约束,如控制曲线首尾端拨距,即Δ0=Δf+1=0,则可依据式(3)建立正矢差与拨距的关系。这一关系用×矩阵[13]描述
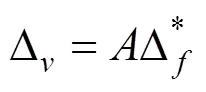
其中
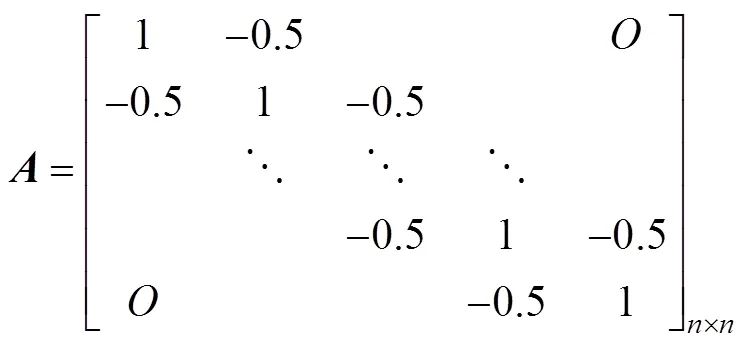
此时,拨距计算转化为求解式(9)的问题。对于系数矩阵满秩条件下,可采用消元法直接求解。分析式(9)的系数矩阵,可知其为常系数的三对角对称阵,且满足对角占优条件,因此可进行Crout分解,将其分解为
其中

2.2 拨距的追赶法计算
考虑到三对角矩阵的特点,式(9)可按追赶法(Thomas algorithm)直接求解,从而避免了Gauss 消去法中的主元选取。取中间变量=[1,2,…,q−1]T,则式(9)求解可依次分为2个过程:按=2,3,…,−1次序计算l,u和q的消元过程(追的过程,如式(11))和按=−1,−2,…,1次序计算Δf的回代过程(赶的过程,如式(12)):
其计算流程如图1所示,得到相应拨距特解Δ*=[Δ1, Δ2,…, Δf]T。
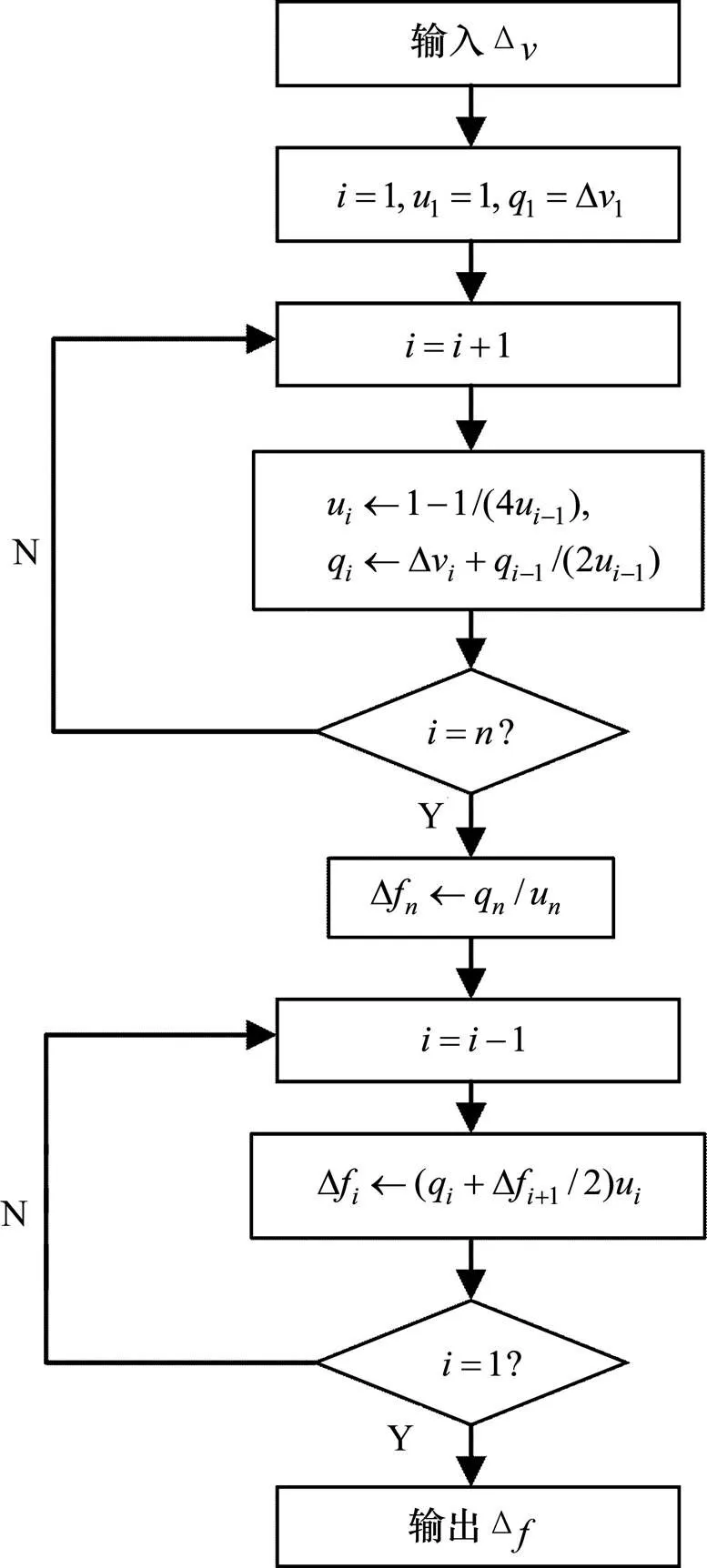
图1 拨距计算流程图
3 算法性能比较及仿真
3.1 基于追赶法的拨距算法与绳正法算法性能比较
拨距计算要在高速铁路的曲线维修中应用,其正矢差累计与正矢差合计应能闭合。同时,一个算法在给定输入时应能在有限步得到输出,并且应具有合理的时间复杂度、空间复杂度、正确性、可读性以及健壮性。
3.1.1 正矢差累计与正矢差合计闭合性能
由式(9)的假设Δ0=Δf+1=0可知,基于追赶法的拨距计算其正矢差合计闭合差
显然,曲线首尾端的正矢差合计闭合。
如正矢差序列Δ不含系统误差及粗大误差,则由随机误差的对称性及抵偿性

从这个角度,正矢差累计也应能闭合。
3.1.2 时间复杂度比较
选取乘法作为基于追赶法的拨距算法与绳正法的原操作,由式(8)与式(9),问题规模为。用原操作的执行次数度量算法的时间复杂度,则
基于追赶法的拨距算法的时间复杂度:

绳正法的时间复杂度:

显然,基于追赶法的拨距算法的时间复杂度要优于绳正法。
3.1.3 空间复杂度比较
用算法所开销的存储空间度量空间复杂度,则
1) 基于追赶法的拨距算法的空间复杂度:
基于追赶法的拨距算法仅需3个存储单元存储对角线及次对角线的数据,并需2个存储单元保存和Δ。
2) 绳正法的空间复杂度:
由于绳正法的系数矩阵是下三角的Toeplitz矩阵,故需要个存储单元存储系数矩阵,并需个存储单元保存Δ。
通过比较可知,2种算法的空间复杂度相当。
3.1.4 算法正确性与健壮性
在满足边界条件(即:绳正法的Δ0=Δ1=0与追赶法的Δ0=Δf+1=0)且Δ无误差扰动时,绳正法与基于追赶法的拨距算法均可得到Δ的精确解。当测量误差或截断误差存在,可用条件数Cond(∙)比较基于追赶法的拨距算法(如式(9))与绳正法(如式(6))拨距的相对误差。
忽略系数矩阵的扰动,拨距Δ将受Δ的扰动的影响。设Δ为拨距的精确解,Δ为拨距的近似解,定义拨距误差向量=Δ−Δ,正矢的残差向量=Δ−Δ。依据文献[14],

则拨距相对误差||||/||Δ||可用正矢相对残差||||/||Δ||与条件数Cond()估计。
同理,计算绳正法的条件数Cond()。由图2可知,绳正法与基于追赶法的拨距算法的条件数均会随矩阵规模的增加而增加,但相对于绳正法,基于追赶法的拨距算法系数矩阵的性态更为优良。

图 2 基于追赶法的拨距算法与绳正法系数矩阵条件数比较
3.2 整正算法的计算机仿真
采用Matlab环境对算法进行数字仿真,通过算例讨论其正确性。然后,依据最大拨距限值通过Monte Carlo方法讨论其健壮性,并与绳正法进行比较;最后采用轨道测量仪绝对测量实测数据作为输入模拟现场曲线轨道状态,通过半物理仿真进一步验证算法的正确性。
3.2.1 整正算法的数字仿真
数字仿真过程中,首先采用表1所示参数生成目标曲线并按式(1)采样计划正矢,然后在目标曲线上迭加一定标准差的正态白噪声形成现场正矢。仿真采用坐标法计算拨距的精确解,用基于追赶法的拨距算法计算拨距数值解并计算拨后正矢。
计算拨距及拨后正矢时,假设Δ0=Δf+1=0并分为以下2种情况分别讨论。
1) 现场正矢测量无差,测量不确定度为0.0 mm(如图3(a)和3(b));
2)现场正矢测量有差,测量不确定度为0.1 mm(如图3(c)和3(d))。
由图3(a)和3(b)可知,当现场正矢测量无差时,无论是拨距抑或拨后正矢均与坐标法精确解一致,验证了算法的正确性;如图3(c)和3(d),当现场正矢测量存在一定误差 (如不确定度为0.1 mm),拨距的数值解与精确解间存在一定的偏差,但拨后正矢与计划正矢误差较小。此外,无论现场正矢测量有差或无差,曲线首尾端的拨距均为0。
3.2.2 最大拨距限值
整正作业受到最大拨距的限制,由《高速铁路工务安全规则(试行)》(TG/GW121—2014)、《高速铁路有砟轨道线路维修规则(试行)》(TG/GW116—2013)以及VOSSLOH 300-1扣件技术条件,可将有砟轨道的最大拨距设为±30 mm,无砟轨道的最大拨距设为±8 mm,相应拨距标准差限值为15 mm 和4 mm。

表1 仿真曲线参数

(a) 拨距对比;(b) 正矢对比;(c) 拨距对比;(d) 正矢对比
以正矢测量标准不确定度σ及测桩号为自变量,最大拨距的标准差为因变量,采用Monte Carlo方法评价基于追赶法的最大拨距,等高线如图4。图中,正矢测量标准不确定度0~0.45 mm,测桩号0~500,对应里程0~5 km。
可知,对于全长为5 km的曲线,如测量标准不确定度为0.4 mm,其最大拨距的标准差可达0.5 m以上,如以95%概率定义最大拨距,最大拨距将超过1 m,显然超差。但当作业里程<500 m时,则其最大拨距的标准差<4 mm,可满足无砟轨道最大拨距要求;或作业里程<500 m时,则其最大拨距的标准差<15 mm,可满足有砟轨道最大拨距要求。而0.4 mm的测量标准不确定度,已可以覆盖钢尺−弦线的精度。
如正矢测量标准不确定度为0.1 mm,则无砟轨道作业里程可扩展到500 m,有砟轨道可扩展到1.1 km。虑及轨道不平顺是局部的,在日常检查及临时补修修程下,基于追赶法的拨距算法计算的精度一般可以满足要求。如要对长大曲线进行综合维修,可考虑采用三维约束的方法[15]引入外部几何参数分段计算。
图4 最大拨距标准差(追赶法)/m
作为对比,采用绳正法[3]计算最大拨距的标准差。如图5,可知仅以保证拨距不大于最大拨距限值为例,当正矢测量标准不确定度为0.1 mm,则无砟轨道作业里程应<100 m,有砟轨道应<200 m;而如正矢测量标准不确定度为0.4 mm,则作业里程更短。
图5 最大拨距标准差(绳正法)/m
3.2.3 拨距算法的半物理仿真
相对于数字仿真,半物理仿真中采用实测数据作为输入,可降低轨道状态的建模难度与线路实验成本,提高系统仿真的可信度。半物理仿真中原始数据来自于某高铁的联调联试,其线路条件为CRTSⅡ型板式无砟轨道,曲线半径=10 000 m,缓和曲线长=430 m;采用Amberg的 GRP1000轨道测量仪采集250 m缓和曲线轨道数据,并通过GRPwin 5.0生成目标曲线及拨距精确解;仿真基于Matlab环境,采用式(1)计算现场正矢并迭加0.1 mm的全误差,然后通过追赶法计算拨距数值解。仿真结果如图6。

图6 基于追赶法的拨距算法拨距值(半物理仿真)
由图6可知,基于追赶法的拨距算法可针对轨道的不平顺生成拨距特解,虽然其值与精确解有2 mm左右的误差,但削峰填谷效果明显,可有效恢复曲线的圆顺;而且其曲线首尾拨距为0的特点,十分有利于作业区段前后的顺接。
4 结论
1) 基于平顺性数据的曲线整正问题是一个以横向偏差为输入,正矢为输出的非齐次线性方程组求解问题,如已知正矢求拨距,则需假设边界条件。绳正法假设曲线起点及起始方向不变,并按测桩号顺序计算渐伸线长度,因此易导致鹅头或反弯。
2) 基于追赶法的拨距算法假定曲线首尾端拨距为0,按正矢差求拨距,其计算分为追和赶的过程。分析表明,该算法相对于绳正法,有利于保证正矢差合计与正矢差累计的闭合,且其时间复杂度、空间复杂度以及健壮性更优;而由于避免了横垂偏的测量,可显著提高曲线临时补修的作业 效率。
3) 数字仿真结果显示,追赶法计算拨距偏差取决于现场正矢的测量误差并对矩阵规模敏感,但拨后正矢与计划正矢误差小。通过与绝对测量数据对比,显示该方法在局部作业时有望得到较好的整正效果。
[1] 高亮, 王璞, 蔡小培, 等. 基于多车精细建模的曲线地段重载列车-轨道系统动力性能研究[J]. 振动与冲击, 2014, 33(22): 1−6, 12. GAO Liang, WANG Pu, CAI Xiaopei, et al. Dynamic characteristics of train-track system in curved track sections based on elaborate multi-vehicle model[J]. Journal of Vibration & Shock, 2014, 33(22):1−6, 12.
[2] 李阳腾龙, 岑敏仪, 白璇, 等. 高速铁路轨道检测的横向偏差算法研究[J]. 铁道学报, 2016, 38(8): 119−126. LIYangtenglong, CEN Minyi, BAI Xuan, et al. Studyonalgorithmsoflateraldeviationfortrackdetectionof high-speedrailway[J]. Journal of China Railway Society, 2016, 38(8): 119−126.
[3] 童大埙. 铁道轨道[M]. 北京:中国铁道出版社, 1988: 243−251. TONG Dayun. Railway track[M]. Beijing: China Railway Press, 1988: 243−251.
[4] 刘永孝, 刘学毅, 张咏军, 等. 铁路既有曲线整正计算中基于坐标法的渐伸线误差分析研究[J]. 铁道学报, 2012, 34(4): 82−87. LIU Yongxiao, LIU Xueyi, ZHANG Yongjun, et al. Study on involute errors in computation of existing railway curve realignment[J]. Journal of the China Railway Society, 2012, 34(4): 82−87.
[5] 铁道部运输局.铁运[2006]146号. 铁路线路修理规则[S]. 北京: 中国铁道出版社, 2006. Transport Bureau of MOR. Transport bureau[2006] No.146. Railway maintenance rules[S]. Beijing: China Railway Press, 2006.
[6] 魏晖, 朱洪涛, 殷华, 等. 绳正法在高铁曲线整道的适用性分析[J]. 铁道科学与工程学报, 2014, 11(6): 92−95. WEI Hui, ZHU Hongtao, YIN Hua, et al. Feasibility analysis on string lining method for HSR curve realignment[J]. Journal of Railway Science and Engineering, 2014, 11(6): 92−95.
[7] 魏晖, 吴仕凤, 朱洪涛. 基于相对测量调轨的高速铁路有砟线路整道技术研究[J]. 铁道标准设计, 2013(8): 11−15. WEI Hui, WU Shifeng, ZHU Hongtao. Engineering trial of relative measuring adjustment method for HSR ballast rail maintenance[J]. Railway Standard Design, 2013(8): 11−15.
[8] 铁道部运输局. TB/T3147—2012, 铁路轨道检查仪[S].北京:中国铁道出版社, 2012. Transport Bureau of MOR. TB/T3147-2012, Inspecting instrument for static geometry parameter of track[S]. Beijing: China Railway Press, 2012.
[9] TONG X, MENG X, DING K. Estimating geometric parameters of highways and railways using least-squares adjustment[J]. Survey Review, 2010, 42(318): 359−374.
[10] Cellmer S, Rapiński J, Skala M, et al. New approach to arc fitting for railway track realignment[J]. Journal of Surveying Engineering, 2016, 142(2): 60150051− 60150057.
[11] 杜鹤亭. 长波长轨道不平顺检测中的数字滤波方法[J]. 中国铁道科学, 2000, 21(4): 60−67. DU Heting. Digital filtering method for long wave track irregularity inspection[J]. China Railway Science, 2000, 21(4): 60−67.
[12] Iverson William C. Analysis of the reconstruction of rail geometry from curvature data[J]. IEEE Transactions on Industry Applications, 1974, IA-10(3): 368−379.
[13] 魏晖, 朱洪涛, 赵国堂, 等. 基于中点弦测模型的无砟轨道精调量迭代求解[J]. 西南交通大学学报, 2015, 50(1): 131−136. WEI Hui, ZHU Hongtao, ZHAO Guotang, et al. Iterative algorithm of HSR ballastless track realignment calculation based on MCO model[J]. Journal of Southwest Jiaotong University, 2015, 50(1): 131−136.
[14] 于寅. 华中科技大学出版社[M]. 3版. 武汉: 华中科技大学出版社, 2001: 275−281. YU Yin. Advanced engineering mathematics[M]. 3rd ed. Wuhan: Huazhong University of Science and Technology Press, 2001: 275−281.
[15] 陶捷, 朱洪涛. 既有线三维约束测量方法: CN, ZL200910114853.7[P]. 2011−06−08. TAO Jie, ZHU Hongtao. Existing line three-dimensional restriction measuring method: CN, ZL200910114853.7 [P]. 2011−06−08.
A throw algorithm with versine difference closure for track curve realignment
WEI Hui1, 2, WEI Yu3, ZHU Hongtao4
(1. School of Automotive Engineering, Jiangxi University of Technology, Nanchang 330098, China; 2. Collaborative Innovation Center, Jiangxi University of Technology, Nanchang 330098, China;3. Jiangxi General Institute of Architectural Design & Research Co., Ltd, Nanchang 330046, China;4. School of Mechatronics Engineering, Nanchang University, Nanchang 330031, China)
To overcome the misclosure problem of current realignment approaches e.g. string lining method, a new algorithm based on Thomas algorithm for throw calculation is proposed which is taking versine data as input. Through setting rational boundary conditions of mid-chord offset (MCO) model which characterized the curve irregularity state, indeterminate equation set could be transformed into well posed equation set, and two ends throw of the curve are 0; since the coefficient matrix of equation set is tridiagonal symmetrical matrix, an algorithm for throw calculation is constructed based on Thomas algorithm and performance of the algorithm has been evaluated. This paper suggests that: throw algorithm based on Thomas algorithm is taking versine data as input, avoided the measuring of curve coordinates. A comparison between string lining method and the new approach indicates that: the new approach has advantages of closure and algorithm performance. Simulation results show that this approach has satisfactory control ability for versine bias, and is expected to get a better realignment result for urgent maintenance.
railway engineering; curve realignment; mid-chord offset;numerical calculation; Thomas algorithm
U216.3
A
1672 − 7029(2019)07− 1637 − 08
10.19713/j.cnki.43−1423/u.2019.07.005
2018−10−19
国家自然科学基金资助项目(51468042);江西省重点研发计划项目(20161BBE50079)
朱洪涛(1962−),男,湖南双峰人,教授,从事测试传感与光机电一体化研究;E−mail:honey62@163.com
(编辑 阳丽霞)
猜你喜欢
高速铁路技术(2022年4期)2022-09-24
高速铁路技术(2022年2期)2022-05-05
高速铁路技术(2022年1期)2022-03-17
汽车工程师(2021年12期)2022-01-17
建材发展导向(2021年24期)2021-02-12
今日农业(2019年12期)2019-08-15
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
中国惯性技术学报(2019年6期)2019-03-04
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
火控雷达技术(2016年3期)2016-02-06
