农林智能无人机通信方向研究
2019-03-24 10:11董作峰赵泽宇
时代农机 2019年11期
董作峰,赵泽宇,王 楠,刘 唱
(山西工程技术学院,山西 阳泉045000)
随着科技的快速发展,由无线电操控或自身程序控制的无人驾驶飞行器——无人机的出现,在世界上引起了巨大反响。当前,为了减少我国在农林监控方面人力资源的浪费,也为了更加详细的了解农林资源,无人机的出现可有效缓解这方面的压力。并且对其通信方面的研究对帮助了解与监控农林资源方面有极其重要的作用。
1 研究背景
1.1 研究现状
早在以前,国外就在农业方面运用有人驾驶飞机进行农药喷洒工作,节省了大量人力,并且可以使农药有规律且均匀分布在农田里。而我国各个地区的农田分布较为零散,使用有人驾驶飞机较为浪费,无人机比较适合我国国情。目前,我国无人机事业已经开始蓬勃发展,逐步应用于农林方面,但由于无人机的应用范围较为广泛、技术有差异,还没有规范的行为规章制度。为此,国家标准化管理委员会联合国家八部委制定了《无人机系统标准体系建设指南》。这大力推动了无人机事业应用于各个领域。
1.2 农林智能无人机通信技术的发展趋势
目前,我国森林面积达到1.75亿公顷,耕地面积1.28亿公顷。面对如此之大的土地面积,并且会出现各种用于不同情况的农林智能无人机,普通的无人机通信技术无法满足需求。在通信技术方面,目前有着诸多问题,例如节点传输容量有限、传输信号弱、信息之间的传输效率低等诸多方面。这些现实问题的出现,为农林智能无人机通信点明了发展方向。
2 无人机通信研究分析
2.1 传统Wi-Fi通信
最传统的通信方式Wi-Fi通信是现今使用最多的无人机通信方式,这种方式操作简单,使用方便,普遍运用于广大无人机上。但存在技术落后、方式陈旧,无人机的安全得不到保障,范围也相对局限,无法远距离传输等缺点。一但无人机飞离信号区就无法接收到Wi-Fi信号致使无人机无法进行信号传输,并且伴随网络的延迟通信也会受到一定的影响。
2.2 Lightbridge图传
Lightbridge图传是由我国大疆无人机公司自主研发独创的一款通信方式。Lightbridge图传不受传统通信机制的影响,所以在图像传输信号发生严重延迟的情况下也不用重新发送数据,仍然能将即时的信号发送到监视器上,即便是有延迟也可以忽略不计,只有150ms左右。当到达该技术的极限距离时,操作员就会收到来自遥控器的警告信号,当信号丢失时,不会给操作员发送过时的信息,不会让操作员误以为无人机还在正常飞行,这点是Wi—Fi传输比不上的优势。但也有一定的缺点,它无法做到超远距离的信号传输,并且容易受到电磁的干扰致使无人机通信受到影响。
2.3 基于卫星无人机通信
卫星无人机通信是一种应用于军用无人机上的通信方式。它是通过无人机上的信号发射设备将信号发射到卫星上,再由卫星将信号传输回地面,这种信号的传输不会受到各种干扰,并且传输速度快、画面清晰、对距离也没有要求。但这种信号发射装置过于复杂无法安装在小型无人机上,致使小型无人机无法通过卫星通信。
3 无人机通信解决方案
通过建立小型信号基站并将其安装在无人机上使其永远都存在于信号覆盖的区域并保持信号良好通信顺畅,增加抗干扰性防止电磁的干扰。
信号基站相对应的无人机(图1),顶端的信号接收器接收来至卫星的信号,上层部分为无人机的控制系统与信号接收系统,下层部分方至信号基站作为无人机的信号源进行信号传输。
信号基站(图2)是一种便捷的无人机信号接收装置,由于其体积微小的特点,方便无人机携带与安放,使无人机不再受到无法接收信号的影响,从而使其飞行距离不再受到限制。信号基站为一个整体模块体积小安装简单对无人机没有增加多余的负担。

图1 信号基站相对应的无人机

图2 信号基站
3.1 卫星信号的接收
北斗卫星导航系统B1频点调制的载波频率为1561.098MHz,然而由于多普勒效应的存在,使得最终到达接收机天线的载波频率发生偏移,所以必须先估计出多普勒频偏,剥离载波,才能进一步对伪码相关峰进行检测。如果己经得到多普勒频偏,还需要确定出对应卫星信号的伪码序列及初相位,复制出正确的伪码,才能检测到伪码的相关峰位,完成对卫星信号的捕获。因此必须通过制定相应的搜索策略来估计出卫星信号的多普勒频偏与伪码及其初相位,对于弱信号还要通过相关方式提高捕获信号的信噪比。常用的捕获方法有:线性搜索法、并行频率搜索、并行码相位搜索和匹配滤波。
接收机通过PVT解算处理获得位置、速度与时间信息,实现定位、测速与定时的目的。由基带数字信号处理过程已经得到了各颗卫星的导航电文信息,首先要在这些电文信息的基础上测算出相应的原始观测量,包括多普勒频移、载波相位、载噪比、俯仰角、伪距、卫星位置坐标和运行速度、信号接收时间和发射时间、接收机钟差和钟漂等信息,然后利用这些观测量来进行PVT解算。
3.2 信号发射
边界路由器是OpenThread网络的核心组成部分,要求协议执行能力强,运行速度快。OpenThread边界路由器HOST端选用了Broadcom四核64位ARMA53处理器,1GB运行内存,板载WIFI和蓝牙模块,满足本文设计要求的同时,性能上留有较多富余量,可进行二次开发功能扩展。OpenThread边界路由器由树莓派和CC2538模块两部分组成,通过USB连接,硬件结构如图3所示:
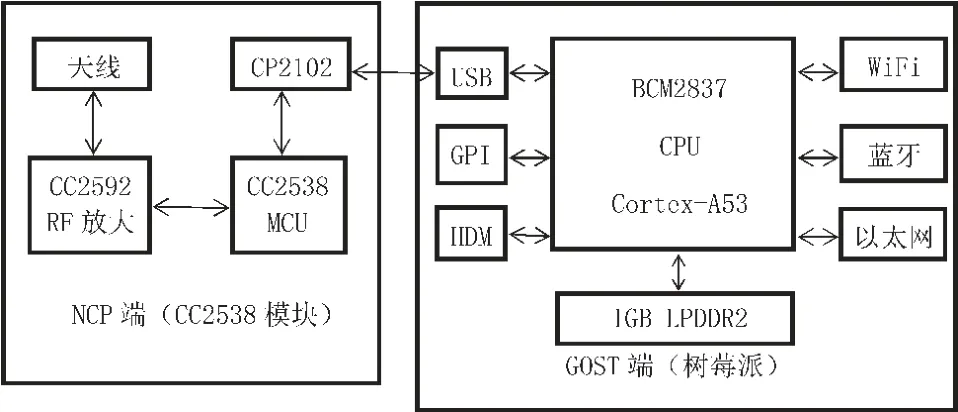
图3 边界路由器硬件结构
树莓派只提供能够访问外部IP网络的以太网和WIFI接口,不支持IEEE802.15.4标准协议,故需要移植有OpenThread协议的CC2538模块来提供对OpenThread网络接入的支持。CC2592是2.4GHz无线RF前端收发芯片,可增加输出功率、提升接收器灵敏度、降低噪声系数。
为了实现IP网络和OpenThread网状网络互联,边界路由器需要同时支持两种异构网络。OpenThread边界路由器采用“HOST+NCP”分离式设计,边界路由器主程序在HHOST端运行,连接IP网络,NCP端(CC2538模块)连接OpenThread网状网络。在该设计中,边界代理通过Wpantund和Spinel与NCP通信,Spine;还提供了NCP的CoAP客户端与服务器之间的接口。系统软件结构如图所示,关键模块功能见表1。此外,边界路由器的WAN(WIFI,以太网)口支持外部专员(如用户的手机)认证和连接OpenThread网络节点,并使用标准UDP套接字与外部专员通信,如图4所示:

表1 关键模块功能

图4 结构图
3 抗干扰设计
抗电磁环境影响技术的作用包括:完整的无人机装备的敏感性分析;外壳屏蔽效能计算;自由空间环境的实验装置设计、评估和规范化;电缆设计和保护转移阻抗提取;复杂电缆系统的感应电流和电压预测;电磁干扰(EMI)滤波器、铁酸盐或非线性瞬态保护电路的性能。
设计PLC控制网络信息抗干扰技术时,针对不同频率的信号选用不同型号的接收器接收信号。网络信息干扰源十分复杂,仅靠回避措施屏蔽干扰是不够的,可利用适当软件编程进行抗干扰处理。通常使用的措施是数字滤波、信息冗余技术或者“看门狗”辅助软件等。PLC网络信息技术的软件抗干扰方式能降低信号的信噪比,本文采用软件滤波方式实现。首先,进行多次信息采样并进行聚集归类,然后储存在不同的寄存器中,通过模拟干扰计算得到干扰类别和干扰预值,判断信息的传输过程。在一定运行环境的影响下,网络电子信号的振动频率过于高或者过于低都会产生相应的跃迁现象,一定程度上会出现网络信息干扰。PLC网络信息技术针对这一现象进行优化设计,以电子信息自身的数据与基础执行命令,对应结果必须保证相应的执行命令被延续,保证多次的有效命令才能完成信息有序传输。如果接收信号不稳定,选择自动停止传输甚至会进行自主警报,方便数据修复,很大程度上提高了数据的真实稳定性,避免了信息干扰。
4 结 语
通过分析通信方向得出无人机发展的必要性和重要性,发现了无人机在通信方面的一些问题,并且用技术手段解决了对应问题。通过该技术,可以解决一些农林无人机通信方面的问题。随着无人机在农林方向的应用拓展,会有更加优秀的通信技术的出现,农林智能无人机会有更广阔的发展,发挥更大的作用。
猜你喜欢
声屏世界(2022年15期)2022-11-08
科教新报(2022年24期)2022-07-08
天津农林科技(2022年2期)2022-04-19
作文小学中年级(2021年10期)2021-12-26
儿童时代·幸福宝宝(2021年11期)2021-12-21
小学科学(学生版)(2021年4期)2021-07-23
科教新报(2021年23期)2021-07-21
恋爱婚姻家庭·养生版(2021年5期)2021-05-31
现代装饰(2020年4期)2020-05-20
天津农林科技(2019年5期)2019-10-29