
基于集装箱轨道动力平车的精确定位系统及方法
2019-04-08 11:09黄泽星
铁路通信信号工程技术 2019年3期
黄泽星
(中铁武汉勘察设计研究院有限公司,武汉 430074)
1 概述
目前,用于港口前沿码头与集装箱堆场之间的集装箱运输方式是传统的港口集装箱集卡车,一般是采用人工驾驶的内燃机动力卡车,满足自动化装卸作业的已经采用自动驾驶的港口集卡车或AGV集装箱自动运行运输车(例如:曹妃甸港、青岛港、洋山港和荷兰鹿特丹港)。
集装箱轨道动力平车系统(简称轨道动力平车或轨道集卡车)是一种运用于集装箱铁水、海水联运驳接中转运输系统中自有动力、自动化运行的轨道运输车辆总称。它是集合铁路动车、铁路集装箱平车车辆、港口自动驾驶集卡车、港口集装箱AGV自动运输车的技术优点进行创新产生轨道运输工具。在铁路与港口之间,建立一种基于自动力运行装载集装箱车辆,新的接驳作业系统、作业设备、作业方法、作业流程以及自动化控制方法提高铁水联运、江海联运集装箱交换货物的效率,减低成本,降低集装箱联运中转时间。
集装箱轨道动力平车本车与相邻车辆、集装箱装卸机具和障碍物之间的相对距离和方位的相对距离需要定位;轨道动力平车相对定位用于在装车、卸车时与装卸机具的同步;重联时与相邻轨道动力集卡车间的调速、制动和连接;解开时与相邻轨道动力集卡车间保持安全距离。为了实现集装箱轨道动力平车的精确定位,本文在基于集装箱自动化装卸作业方式下提出一种集装箱轨道动力平车定位系统和方法。
2 系统结构与功能
集装箱轨道动力平车设定位系统,是轨道动力平车车载计算机控制系统的子系统,用于作业和行驶中轨道动力平车车辆自主定位和相对定位。定位系统由自主定位系统、相对定位系统和监控系统组成。自主定位系统主要由GPS/BD+差分校正系统、信标+走行测距仪定位系统组成;相对定位系统主要由红外、超声或激光雷达测距仪系统组成。如图1 所示。
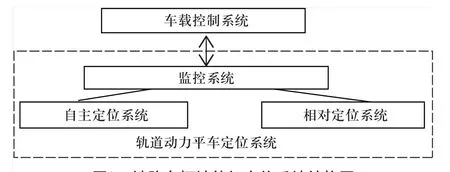
图1 铁路车辆计算机定位系统结构图Fig.1 Structure diagram of railway vehicle computer positioning system
自主定位系统用于轨道动力平车在自动化装卸作业中定位,自主定位可以采用全球卫星定位技术及差分定位(GPS/BD+差分)、信标+走行测距仪等满足轨道动力平车自动化作业的精度要求的技术。差分定位用于常规运行定位,信标+走行测距仪用于遮蔽区域的精确定位,磁钉是信标的一种。
相对定位系统测量本车与相邻车辆、障碍物之间的相对距离和方位的相对距离定位,用于轨道动力平车重联过程中与相邻轨道动力集卡车间的调速、制动和连接;轨道动力平车解开过程时与相邻轨道动力集卡车间保持安全距离。满足自动化装卸和运输作业的要求。
监控系统用于自主定位系统、相对定位系统数据汇总、整理和车辆位置换算,控制相关的网络通信和数据信息交换,实现人机交互查询功能和维护。监控系统采集信号并运算后的坐标,传输给车载计算机控制系统用于轨道动力平车的控制。监控系统采集信号并运算后的坐标,可以在铁路线路里程和地理坐标之间转换,可以用于在不同运用环境和不同系统之间交换定位信息。
3 系统定位方法
轨道动力平车是一种典型的路基交通方式。它运行在固定的轨道上,运行环境绝大多数在常规线路中,部分路段在站场遮蔽区域,这就需要系统在作业范围内提供精确并且延迟较小的位置信息供给车载计算机控制系统作为控制依据。
3.1 自主定位系统及方法
轨道动力平车自主定位系统采用“卫星差分定位系统和信标+走行测距仪定位系统”组合定位方式提高定位精度,满足自动化作业的精度要求。
轨道动力平车在初始状态和铁路区间等空旷控制区域采用“GPS/BD+差分校正系统定位技术”,在有遮蔽的区域和需要与装卸机具精确配合的装卸作业区域采用“信标+走行测距仪定位系统”。
“2GPS/BD+差分校正系统定位技术”是成熟技术,有成熟的产品。轨道动力平车设置卫星定位接收机,通信终端连接到轨道动力平车车载控制系统,定位系统选用高精度的差分卫星定位接收机作为参考系统,为了达到参考系统与被测系统测量位置一致的要求,用信号分配器将从卫星信号接收天线接收到的信号分配给参考系统以及被测系统的GPS/BD 接收机。在有遮蔽的区域和需要与装卸机具精确配合的装卸作业区域采用“信标+走行测距仪定位系统”。走行测距仪通过测量轨道动力平车车辆车轮同轴的测速电机和旋转光栅传感器或轮速传感器来给出信号计算出速度、方向和行驶距离。测速电机适用于中高速运行速度的测速,低速运行时误差较大;而旋转光栅传感器或轮速传感器适用于低速运行车辆的测速,运用于在高速运行区段时对测速系统传感器的反应时间提出较高的要求。 走行测距仪传统上被固定在传动轴上。轨道动力平车车辆在车轮上安装一个走行测距仪,也称为轮速传感器,用于防抱死刹车系统。走行测距仪安装在传动轴上,每当锯齿穿过传感器,磁通密度就会变化,测量它会产生一个脉冲信号,脉冲数与行驶距离成正比,通过差分可给出速度。
磁钉技术是信标定位技术的一种,在铁路车站到发线、编组线、装卸线等线路钢轨枕木上相隔一定距离装设磁钉,磁钉定位的隐秘性好、美观性强,磁钉抗干扰强,抗磨损性强,抗酸碱、油污等影响,磁钉预埋打孔填埋在枕木地面下,整个铁路线路地面以上不需要其他定位辅助设备,不会影响轨道线路行车安全。每一个磁钉都记录着其在铁路线路上的铁路里程坐标。在集装箱轨道动力平车底盘的前端安装检测天线。当轨道动力平车在铁路线路上行驶或作业时,设在轨道动力平车两端天线在覆盖磁钉时可以测量磁钉相对于天线的位置,同时读出磁钉在铁路线路中的铁路里程坐标位置。
这样,当轨道动力平车上天线检测到磁钉时,就可以直接计算出轨道动力平车在铁路线路上的铁路里程坐标。天线在运行过程中检测出一个磁钉就知道定位,检测到两个磁钉就知道运行方向,监控系统通过磁钉铁路里程的大小变化判断轨道动力平车的运行方向。轨道动力平车在有遮蔽的区域和需要与装卸机具精确配合的装卸作业非道岔区段采用“磁钉定位+走行测距仪定位系统方式”。在道岔区段,由于道岔轨道线路复杂,磁钉无法有序安装,采用走行测距仪定位系统,可以满足定位要求,如图2 所示。
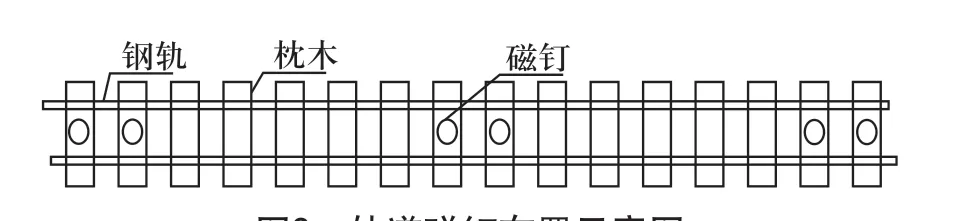
图2 轨道磁钉布置示意图Fig.2 Schematic diagram of railway magnetic nail layout
为提高轨道动力平车在极低速度和高速运行环境下都能够满足走行测距精度的要求,本方案走行测距仪采用测速电机与轮速传感器或光栅传感器组合测量方法,在两种精度速度测量曲线交叉点选取传感器数据转换点。例如:设定30 km/h 为交叉点,30 km/h 以上采用测速电机测量的数据,30 km/h 以下采用测速轮速传感器或光栅测速传感器测量的数据。
安装在轨道动力平车列车车轴上的测速电机通过统计车轮转过的圈数和角度,然后用圈数乘以轮径周长来得到轨道动力平车在此段内的运行距离。当轨道动力平车初始位置与随后的运行距离已知时,就可以计算出轨道动力平车的当前位置,以此来实现轨道动力平车定位。
轨道动力平车车轮上加装轮速传感器或光栅传感器组合,使用光电设备对车轮的转动圈数和角度进行量测并计数,然后再乘以车轮周长从而得到列车的位移。安装在轨道动力平车上的测速电机与轮速传感器或光栅传感器互为冗余,两种设备都可以测出轨道动力平车的走行距离与速度,再加上安装在轨道线路上的磁钉定位系统,就可以得到轨道动力平车的精确铁路里程坐标。监控系统预先存储车站场电子地图,站场电子地图包含了车站的各种地物图形数据(如通道、涵洞、桥梁、天桥等)、精确的铁路里程坐标(误差为cm 级)、附属设施以及股道、转线道岔、信号机、绝缘节、警冲标、车挡和站台其他相关属性数据以及测量点与参考坐标点的距离等物理数据。监控系统根据轨道动力平车在铁路里程上的铁路里程坐标从而得到轨道动力平车的在铁路线路上精确位置。监控系统得到轨道动力平车车辆车号所对应的精确位置坐标定位,形成一组(车辆车号、精确位置坐标)数据信息上传至车载计算机控制系统。
3.2 相对定位系统及方法
轨道动力平车相对定位系统装置主要采用超声、红外线或激光测距、雷达测距原理,在轨道动力平车两端分别设置红外线或激光测距仪,采用红外线激光光束扫描轨道动力平车周围环境,轨道动力平车通过接收反射信号,判断相邻车辆和障碍物之间的相对距离,并按铁路集装箱作业现场环境需要,依据不同距离设定多级不同的报警区和危险区。当相邻轨道动力平车车辆障碍物在不同报警区时,发出报警信号或减速,当相邻物体在危险区时,轨道动力平车定位系统将信息传达给车载控制系统,轨道动力平车车载控制系统控制轨道动力平车动力系统和制动系统,轨道动力平车可以立即减速停止下来。
相对定位系统测量本车与相邻车辆、障碍物之间的相对距离和方位的相对距离定位。相对定位用于在装车、卸车时与装卸机具的位置同步,重联时与相邻轨道动力集卡车间连接时的调速、制动;解开时与相邻轨道动力集卡车间保持安全距离确认,满足自动化装卸和运输作业的要求。
铁路集装箱自动化控制系统下达装车作业装车位置、数量指令,通过车载总线传递给轨道动力平车车载控制系统,车载总线接受轨道动力平车定位系统初始定位,车载控制系统控制轨道动力平车向装车线装车位置运行,轨道动力平车运行过程中,定位系统不断将位置信息发送至车载控制系统,当车载控制系统得到的铁路里程坐标与装车线装车位置一致时,车载控制系统控制轨道动力平车减速停车。轨道动力平车到达指定位置,通过车-车无线通信系统与集装箱装卸机具交换位置数据,与装卸机具保持协同装车距离并同步移动。
4 结束语
本文在基于集装箱自动化装卸作业方式下,为解决铁路集装箱装卸作业车辆定位精度不高的问题,实现集装箱轨道动力平车本车与相邻车辆、障碍物之间的相对距离和方位的相对距离相对定位,提出了一种集装箱轨道动力平车自主与相对定位系统和方法。本方案是基于GPS/BD+差分、信标+走行测距仪组合定位系统,集装箱自动化控制系统计算解决每一个集装箱轨道动力平车在铁路线路中自主精确定位;基于激光测距仪或雷达测距仪定位方法解决集装箱轨道动力平车本车与相邻车辆、障碍物之间的相对距离;轨道动力平车车辆通过上述定位方法可以调控车辆运行速度、运行方向、停车位置,其定位精度满足装卸自动化的轨道动力平车作业定位精度要求。
该系统适合铁路港湾站集装箱装卸中转作业及运行中集装箱轨道动力平车精确定位及相对定位,也适应其他用途的运动或静止铁路有源车辆的精确定位。
猜你喜欢
商品与质量(2021年27期)2021-11-23
园艺与种苗(2021年12期)2021-02-24
中西医结合心血管病杂志(电子版)(2020年28期)2020-12-10
空间科学学报(2020年6期)2020-07-21
铁道货运(2020年3期)2020-04-01
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
现代装饰(2019年7期)2019-07-25
专用汽车(2018年10期)2018-11-02
专用汽车(2015年2期)2015-03-01
