智能船舶主要技术分析与小型无人船研发
2019-05-06 06:21严健雄张少明
船舶 2019年2期
高 炳 严健雄 王 磊 张少明
(1. 广东交通职业技术学院 广州510800; 2. 广东省船舶自动化工程技术研究中心 广州510800;3.武汉理工大学 能源与动力工程学院 武汉430063)
引 言
近年,智能船舶研发与应用不断攀新[1-3]。2015年12月,中国船级社(CCS)发布了全球首部《智能船舶规范》。该规范是基于中国船级社科技研究成果,并分析了国内外有关智能船舶的相关情况,包含应用经验、发展动向和未来趋势研判等[4]。该规范主要内容包含:为什么需要智能船舶、什么是智能船舶、怎么在智能船舶中应用新技术,以及有哪些硬件和软件配置要求等。
当前我国智能船舶技术研发大致与国际先进水平齐头并进,在智能船舶标准规范研制、船型研发、智能机电设备集成研发等方面已有一定成效,但要实现智能技术在船舶上的成熟应用与市场化,仍还有不少高峰需要攀登。
1 智能船舶涵义界定
智能船舶已成为全世界各国各方的研究热点,有不少相关船舶研发机构、船级社和政府主管部门对智能船舶进行了大量的研发、标准制定和规划[4-6]。但是我国当前还没有完整意义的智能船舶,各方对智能船舶的涵义界定也有不同表述。世界上已有几个代表性的研究成果涉及阐述智能船舶的涵义界定,对照分析如表1所示。
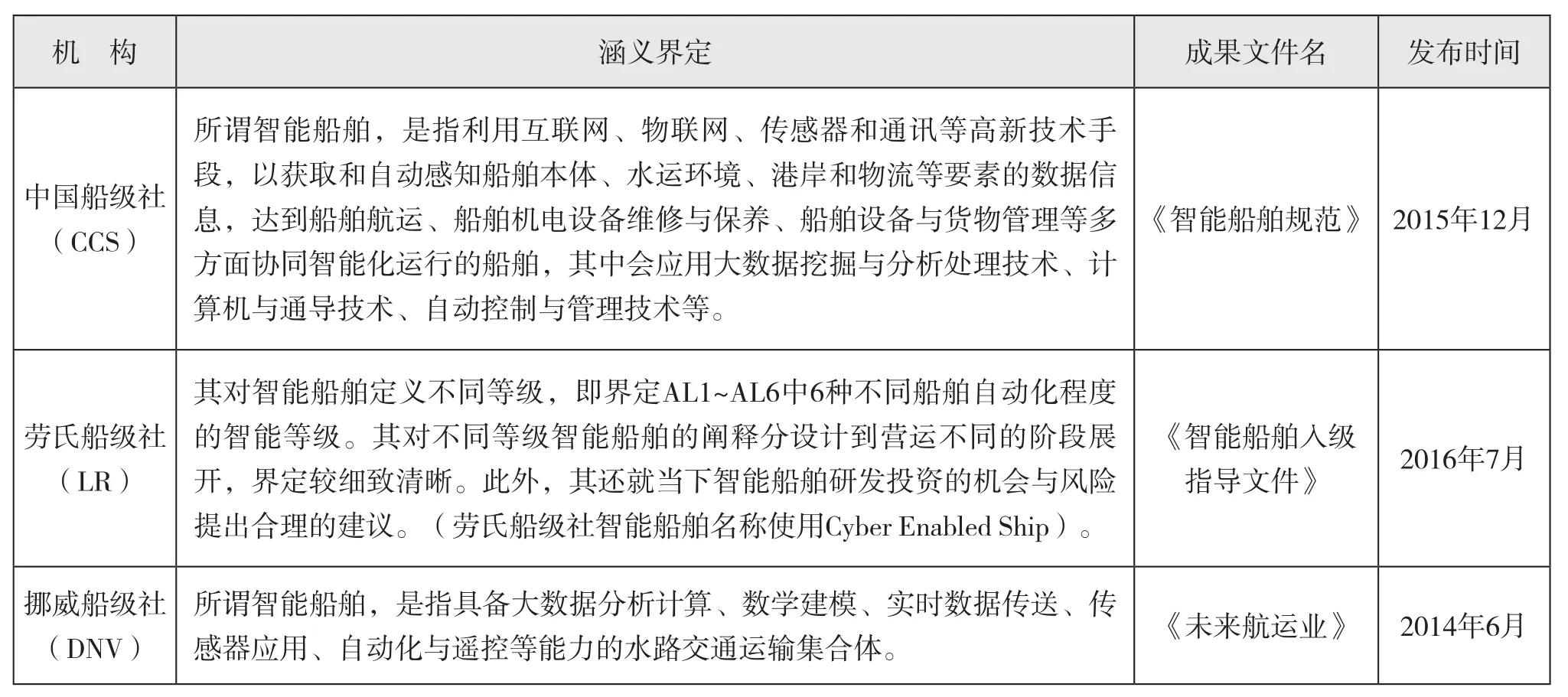
表1 世界主要研究机构对智能船舶的涵义界定比照表
CCS《智能船舶国际规范》对智能的涵义建立数学模型,把航行智能、机舱智能、船体智能、货物管理智能、能效管理智能和集成平台智能等6个要素建模为 :i-Ship(Nx,Mx,Hx,Cx,Ex,Ix)。
该模型中:x是可选功能补充参数象征符号,N为航行智能、M为机舱智能、H为船体智能、C为货物管理智能、E为能效管理智能,I为集成平台智能。船舶可选其中一项智能功能,也可同时选几项智能功能,相应数模可配置一个或者几个相关功能参数。
2 智能船舶主要机电应用技术分析
2.1 智能船舶技术研发路径
对于智能船舶技术的研发路径,全球范围内都热切关注且各有策略,达成共识的是:都认为智能船舶技术研发不可一步登天,需要理性循序渐进、分阶段突破,最终目标是实现包含远洋交通运输在内的完全无人驾驶,即真正的智能化自主航行船舶。选取具有代表性的国家海事组织(IMO)、中国船级社、劳氏船级社以及罗尔斯·罗伊斯公司的智能船舶技术研发规划路径图并进行对比研究(参见表2)。可见,智能船舶的研发路径不是简单的直线型,而是多方面同步协调发展的过程。
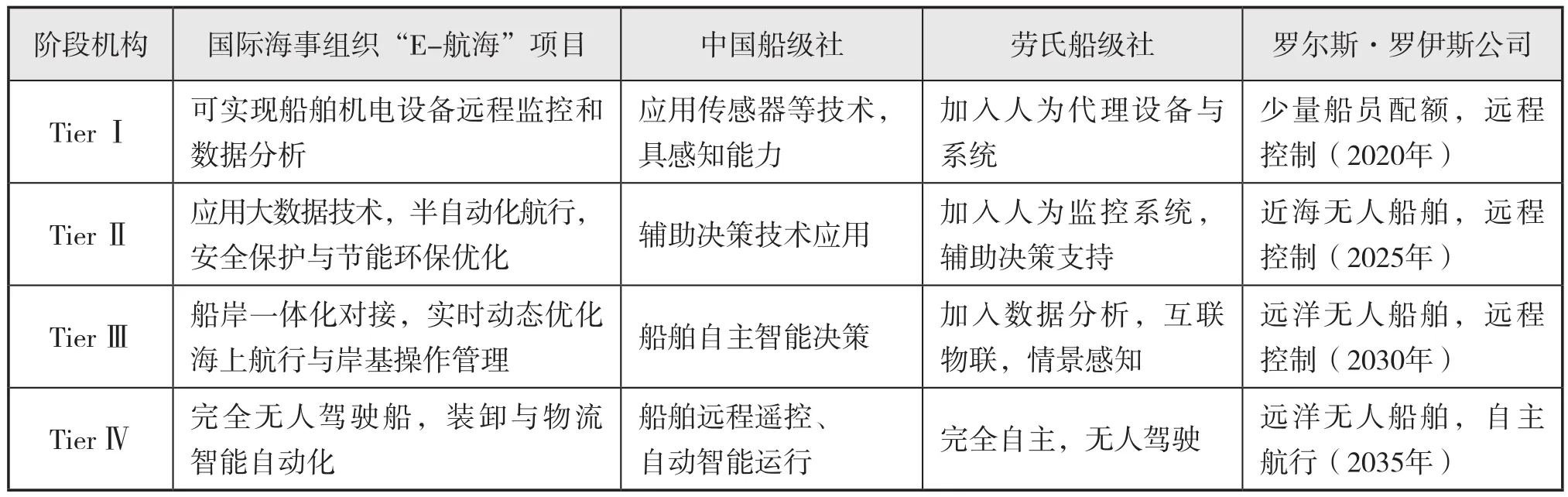
表2 全球代表性智能船舶技术研发规划路径对比表
2.2 大数据挖掘处理技术
通信技术、计算机技术的发展日新月异,大数据技术应用的范围越来越广。毋庸置疑,大数据技术是智能船的必选项。当前,大数据技术在智能船舶上的推广应用需要解决的关键点是根据现有行业资源和特点,寻求合适船舶领域的大数据挖掘与分析处理思路与方法。而大数据技术分析方法大致有两种,一种是以物(计算机或者机器)为基点来讨论,突出的是物的人工智能与计算,涉及到的主要研究方向包括数据挖掘算法、智能搜索、高速高精度处理计算方法等;一种是以人为基点来讨论,突出的是与人认知规律匹配、人机可友好交互的分析方法,目的在于让物(计算机或者机器)能像人一样“认知”或“思考”。
大数据在船舶上的应用就是利用大数据为船所用,提供有益有用的辅助决策信息,并挖掘潜在价值。大数据技术应用在船上有各种优势,列举以下几点:
(1)借助大数据,可研判船机状况以提升船机的维护操控水准;精准核算备件数量,优化机电设备等资源配置。
(2)以船机油料物料消耗的真实大数据、船舶航速等数据为基础,设置最优经济航速等辅助优化船舶管理决策。
(3)通过AIS数据实时掌握船舶动态,提升水路交通营运管理控制效率。
国内已有部分单位在研究甚至正在应用船舶大数据技术,也有公司已研发出船舶管理大数据平台,其包含船机维护与修理、船员证件操办、质量体系维管、物资与备配件管理和安全管理等。可见,利用大数据平台可有效提升船机营运的效率、安全可靠性与经济性。
2.3 船机信息感知技术
船机信息感知技术主要是应用传感器、信息处理器和通讯网络,获取各种有用的船机和环境信息来辅助决策船舶营运,以求船机更安全、航行操作更便利可靠的一种方法。感知的信息主要包含船机本体和相关环境。
船机本体信息来源包括:
(1)船舶航行状态信息,比如船位、航速、航线方向等;
(2)船舶机电设备状态信息,比如船舶主机转速、各处压力、水位、油位等。
目前此类信息传感器技术较为成熟可靠,市场上有各种物理信号的传感器产品可选。而相关环境信息相对来说比较复杂,涉及船舶周围的各种物理存在、天气条件、海水静止与流动特性、监视信息等,其所用的信息感知硬件也较为高精尖,包含航行数据记录仪(VDR)、AIS、激光雷达、电子海图、摄像头(机)等。此类需感知的环境信号繁多、来源不一,存在信息冗余、不一致,甚至冲突的情况,是研发的重点和难点。
2018年,全球最大航运公司马士基航运与Sea Machines Robotics公司合作,在新建造的集装箱船上试验了人工智能AI情景感知技术。其首次综合利用计算机技术、光传感与检测、激光雷达(测距)和配套感知软件的人工智能方案,系统采用先进传感器不间断采集船机周围信息,感知和分析处理威胁(潜在事故),并在驾驶台人机交互界面上显示,以此提升船舶海上营运中的目标识别、情景感知能力。
2.4 无人船技术
新时代热点——机器人、无人车、无人机的出现和应用,促进了无人控制技术、方法和理论体系飞速发展[7-9]。无人驾驶技术在船舶上的应用当然也不甘落后,业界多方均密切关注并积极研发[10-14]。
无人船技术是“船舶智能”的又一次飞跃,是智能船舶的最终目标形式之一。所谓无人船技术,狭义通常理解为无人驾驶技术,即通过远程控制和智能技术达到对无人船的驾控。
现有的船舶综合驾驶台系统(IBS)虽有航线规划与记录、自动避碰等功用,但远非无人船技术应包含的内容。无人驾驶船主要涉及船机信息感知、远程识别、航线路径规划(避碰)与记录跟踪、航迹控制技术等。图1为船舶智能避碰的逻辑机理。
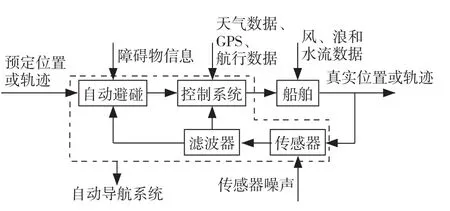
图1 船舶智能避碰逻辑机理图
在传统的有人驾驶船舶上,其航迹操控主要应用航迹自动舵技术。先后衍变进化的舵技术为机械、PID、自适应与智能自动。对于稳定简单的系统,目前虽仍较多使用PID控制,但大部分真实航行的船舶,其存在时变性、时滞性和非线性问题,此时若单用PID控制就易出现误判。为解决此缺陷,科研工作者研发应用了一些先进的算法,其中以MPC(模型预测最优化控制)法和LOS(视线距离状态反馈导航)法最具代表性。
当前我国也已有研发无人船技术,如:“领航者”号无人船、“无人智能测量平台”以及“芙蓉”号小型无人船等。
3 “芙蓉”号小型无人船研发
3.1 方案设计
笔者所在团队研发的“芙蓉”号小型无人船,是集成应用智能传感、PLC控制器、无线远程控制等技术,所设计的一套小型无人船智控方案,并在学校游泳池和开阔水域进行了操控试验,基本实现小型无人船的自主航行与远程遥控要求,如图2所示。
图2 “芙蓉”号小型无人船测试图
方案采用一对多的上位机控制策略,无线透传技术试验近距离遥控。设置多频率通道,可精准管控对应频率的小型船,其设计系统方案如下页图3所示。
3.2 功能与硬件
“芙蓉”号小型无人船的主要功能是以PLC控制为核心,操控调节2台直流吊艇电机转速进行无人船航速与航向操控,实现基本水面温度、水深等一般水文测量,完成活动水面油污抽取检测装置设计(即15 ppm海面油污信号采集);然后以PLC的RS485端口连接的 433~480 MHz无线透传传输模块作为主要通信模式,融合与4G网络模块相结合的遥控技术,并配置BaiduGIS定位模块;最后,力控组态完成上位机人机界面与后台数据库管理,运用其策略组运算进行自主航行计算,从而实现上位机监控与自主航行功能。
方案省却了检测船舶航向的罗经设备和控制船舶航向的操舵设备,采用双艇外直流电机提供动力,并通过调节双电机转速操纵船舶转向控制。方案所订制的长度1.4 m船模,设有防水防撞防磨损装置,船体带有警灯、警报器以及视频监控装置与避障系统,采用闭孔泡沫填充、全封闭防水和上下隔舱等防沉设计,拥有一定船舱空间。12 V直流有刷吊艇电机,1 800 r/min,额定电流20 A. 12 V锂电池2组供电,满足一定的续航能力。
3.3 自主航行算法
自主航行计算法即采用简单的PID位置算法,实现定点自主航行(如图4所示),定出终点坐标B,可得航线AB函数根据GPS每秒反馈回的坐标位置坐标(X1,Y1),计算偏航角以及偏航距离得控制离散公式,见式(1):

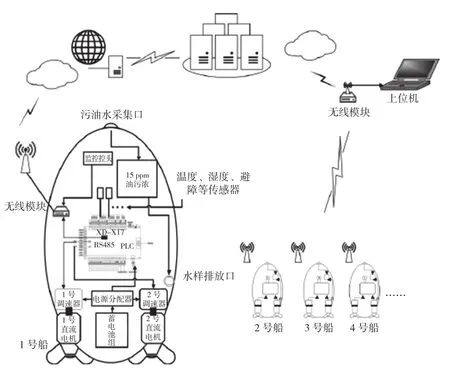
图3 “芙蓉号”系统设计图

图4 航行算法坐标图
为提高自助巡航能力,可在原有基础上结合车载导航系统使用的Dijkstra算法和A*算法,并对传统的规划算法进行改进,即最优路径搜索算法,结合无人船自有的避碰传感器进行避碰操作控制,可实现更加复杂的自助巡航设计。
3.4 实船航行测试与反思
小型无人船实船具有在开阔水域自主航行的能力,船舶设有开阔水域自动避碰系统,可按预定的航路实现自动避碰,并进行自主航行,符合Ⅲ类计算机系统的要求。下水巡航时间可实现4 h(2 m/s下)和高速2 h(4 m/s下)。无线透传模块测试正常,如前文中图2所示。
自主航行算法处理中,Kp= 0.6Ku、Ti= 0.5Tu、值取经验法值,值变化较快,导致电机转速变化过快,船舶操控性变差,实际值操作中将GPS采样降为2 s采样一次,基本能完成定点导航功能。不同船型的大小、电机功率及定位传感器信号精度等均影响控制效果,取值参考意义不大。
4 结 语
智能船舶机电应用技术主要包含大数据挖掘处理技术、船机信息感知技术、无人船技术、智能机舱技术等,其中部分技术已经成熟应用,比如信息感知之传感器技术、智能机舱之状态监测技术等,但是还有很多关键技术缺少理论体系或实际验证,比如无人船之自主航行技术、智能机舱之能效控制技术、无人船之航线规划技术等。
小型无人船“芙蓉”号的试验研发,在智能船舶、无人船技术的方案设计、功能与硬件、算法优化等方面的研发有创新引领和经验积累作用,具有示范、推广与借鉴的价值。控制基站,可实现手动操纵与基本自助航行能力,完成水质采样、定位、姿态、无人船工作状态等航行控制及其他野外作业任务,实现各类数据信息的快速、准确采集与传输,系统可靠运行。今后需进一步研究如何提高自助巡航的精度与准确性。由于目前选用的是普通精度定位器,出现了单坐标定位误差较大的问题;此外,因需不停计算船位,便出现短暂停止、耗时较长,甚至跑偏等问题。后期拟通过提高测量精度或加装罗经航向测量等传感器来寻求优化解决方案。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
船舶(2021年4期)2021-09-07
疯狂英语·新读写(2021年6期)2021-08-05
军民两用技术与产品(2021年2期)2021-04-13
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
船舶标准化工程师(2019年4期)2019-07-24
小哥白尼·趣味科学画报(2019年12期)2019-02-28
创新作文(1-2年级)(2017年7期)2017-12-26