
检测器误差对路网流量推算影响的灵敏度分析
2019-05-09 07:28邵敏华周晨阳
同济大学学报(自然科学版) 2019年4期
邵敏华, 周晨阳
(同济大学 道路与交通工程教育部重点实验室,上海 201804)
路网的交通流量分布是交通规划、交通设计、交通管理工作中的重要基础信息.对于庞大的城市路网而言,在每个路段都布设检测器来获取所有路段流量的方法耗资巨大,不具有可行性.因此,在实际应用中,如何通过布设少量的检测器来获取全路网所有路段的流量成为研究热点,这就是网络检测器布设问题.检测器布设问题可分为可测流问题和估计流问题[1].前者旨在以最少的检测器数量和最优的检测器位置来唯一推算路网内所有路段的流量[2],后者则在检测器数量不足以唯一推算所有路段流量的前提下,研究可获取最优流量估计值的检测器布设方法[3-5].
本文关注的是检测器布设可测流问题中的误差分析.自Bianco等[2]于2001年首次提出这一问题以来,伍建国等[6]、邵敏华等[7-9]、Castillo等[10-15]、Rinaldi等[16-18]先后围绕这一问题,选择转弯比、分流比、路段或路径系数等不同的先验信息以及计数检测器、车牌检测器等不同的检测器类型,构建了多个模型,并给出了求解算法.其中,多数模型建立在检测器误差为零的前提下.现有研究对检测器误差的考虑较少,多为检测器布设估计流问题中的误差分析.Castillo等[12]在定位车牌识别检测器时考虑了路径匹配误差来测量和估计路径流量.Yang等[19]在2015年通过选择一组可以保证可测和估计精度的关键OD(origin-destination)先验信息,建立了OD可测分析与估计问题之间的联系.
在检测器布设与可测流问题研究中,仅Xu等[20]进行了讨论,提出在零先验信息条件下,可以用连接每个节点未检测路段的最大数量最小或累积数量最小替代优化目标,建立了考虑检测器误差的鲁棒检测器布设完全可测模型.
本文聚焦于检测器布设与流量推算问题中的检测器误差分析,在文献[7-9]研究的基础上,以交叉口转弯比为先验信息,以路段流量检测器为检测手段,采用灵敏度分析的方法研究检测器误差对全路网流量推算结果的影响,并进行实例验证.
1 问题提出
文献[7-9]中,以唯一推算得到网络内所有路段的流量为目标,以交叉口转弯比为先验信息,以路段流量检测器为检测手段,建立了网络检测器布设可测流模型,确定了最小检测器数量,并给出了检测器布设位置优化算法.
首先对路段分类,按路段与交叉口的关系可将路段分为以下三类[7-8]:①只出路段,在研究路网范围内仅为某交叉口的出口路段而不是任何交叉口的进口路段;②进出路段,在研究路网范围内同时为交叉口的进口路段和出口路段;③只进路段,在研究路网范围内仅为某交叉口的进口路段而不是任何交叉口的出口路段.只出路段和进出路段统称为出口路段.
本文中检测器布设以路段为单位,设路网由k条路段组成,其中有m条出口路段,有(k-m)条只进路段,g条交通生成量非零路段.全网流量可测的加权网络检测器布设问题(NSLP)模型如下所示:
maxWY
式中:W是所有路段的权重向量,W=(w1,w2,…,wj,…,wk+g),wj用于综合表征路段j的重要性和检测成本,路段重要性越高,检测成本越低,wj越大;Y是决策向量,Y=(y1,y2,…,yj,…,yk+g)T,yj为决策变量,yj=1代表路段j被检测,yj=0代表路段j不被检测;C是系数矩阵.C源于流量守恒方程,如下所示:
CX=B
其中,

aij=

A1表示只出路段和只进路段组成的集合.
系数矩阵C可分为子阵A和Y′.子阵A由基于转弯比的流量守恒方程得到,子阵Y′记录检测路段及其位置信息.C可表示为

其中,
X为推算路段的流量向量,X=(x1,x2,…,xk+g)T.B为常数项列向量,B=(b1,b2,…,bm,bm+1,bm+2,…,bm+k+g)T,向量B也可分成B0和BY两部分,B=(B0,BY)T,其中B0=(b1,b2,…,bm)T,BY=(bm+1,bm+2,…,bm+k+g)T.B0是流量守恒方程组的常数项系数,由m个零元素组成,即b1=b2=…=bm=0;BY由(k+g)个检测路段的检测流量组成.
可以看出,这一模型是基于零检测器误差建立的,但在实际应用中,检测器误差难以避免.检测器误差的存在必然会对路网流量推算结果造成影响.以文献[8]中的实例路网为例,说明检测器误差对流量推算的影响.
以图1所示的简单路网为例,共14个路段,假设路网所有路段均无交通生成量.确定检测路段集{9,10,11,12,13,14},假设所有路段转弯比均为(0.1,0.6,0.3),此时矩阵C的秩等于路段数14,基于式(1),根据流量守恒方程组唯一确定各个路段上的流量.

图1 简单路网示例
在零误差条件下,假设所有检测路段的流量均为1 000,可唯一推算路网中所有路段的流量,如表1所示.现假设路段9的检测器出现20%的误差,使得检测流量变为800,采用存在误差的检测数据进行流量推算,结果也列于表1中.
由表1可知,路段9出现检测器误差后,{2,3,4,5,6,7}路段的推算流量都出现不同程度的变化.剖析检测器误差对流量推算结果的影响机理对于完善既有模型、提高流量推算精度具有十分重要的意义.
2 检测器误差对路网推算流量的灵敏度分析方法
本文中采用灵敏度分析方法研究检测器误差对路网流量推算的影响.路网中的路段可以分成以下三类:①检测路段,通过检测器可以直接测量流量的路段;②误差源路段,检测路段中存在检测器误差的路段;③推算路段,路段流量需通过检测路段流量来推算的路段.
以误差源路段检测器误差为零时的路网流量推算结果为真值,在非饱和路网中,研究误差源路段存在不同程度的检测器误差时,路网流量推算结果与真值之间差异程度的变化.
2.1 给定检测器布设方案下的流量守恒方程组构建
由于原流量守恒方程组是对一般情况的表示,而本文研究是基于某种给定检测器布设的方案,为了简化计算,有必要简化原流量守恒方程组,构建出给定检测器布设方案下的流量守恒方程组.
原系数矩阵C包含(k+g)条路段,令n=k+g,即C中包含n条路段.另外,C的子阵Y′含有实际信息的只有布设检测器的(n-m)行,其余部分全为零.为简化模型,删去Y′中全是零的行,并对路段进行重新编号.对于检测路段在最后的(n-m)行,即检测路段集对应行号为{m+1,m+2,…,n}的行,将这(n-m)个检测器记为{ym+1,ym+2,…,yn}.将原系数矩阵C中(n-m)个检测器对应列调到最右,使得新矩阵右下角(n-m)(n-m)子阵为对角矩阵,这样生成新的系数矩阵,记为C1.C1中系数aij因为列调换而变化,使常数项列向量B变为B1,同时解集X中每个元素对应的路段也发生变化.生成的新流量守恒方程为
C1X=B1
其中,
X=(x1,x2,…,xn)T
B1=(b1,b2,…,bm,bm+1,…,bj,…,bn)′
将B1中前m个元素组成的向量记为B0,则B0=(b1,b2,…,bm)T=(0,0,…,0)T.B1的后(n-m)个元素表示检测路段的流量,记为BY,BY=(bm+1,…,bj,…,bn)T.
2.2 流量推算误差项推导

表1 有无检测器误差的流量推算结果比较



对推算流量有
因此,可得


2.3 单个路段检测器误差的影响——影响系数



(1)
式中:ΔB(j)表示向量ΔB的第j个元素.
ΔX=ΔbUj=ΔbCe=

为反映单个误差源路段检测器误差对推算路段流量推算结果的影响,定义影响系数为:将cie定义为误差源路段ys检测器误差对路段i的流量推算结果的影响系数,i∈{1,2,…,n},路网所有路段影响系数的集合称为影响向量,即c1e,c2e,…,cie,…,cne分别是误差源路段ys对路段1,2,…,n的影响系数,Ce为误差源路段ys的影响向量.
2.4 多个路段检测器误差的影响——关键系数


(2)
因此,可以算出流量变化量ΔX.ΔX计算式如下所示:

为了反映多个误差源路段检测器误差对推算路段流量推算结果的影响,定义关键系数为:将多个误差源路段检测器误差对某一推算路段流量推算结果的影响程度定义为关键系数,路网所有路段关键系数的集合称为关键向量.
2.5 关键系数和影响系数的关系
根据影响系数和关键系数的定义,对应单个误差源路段时,Ce是影响向量也同为关键向量,因此关键向量就是影响向量,关键系数就是影响系数.对应多个误差源路段时(假设有r个误差源路段),Ce1,Ce2,…,Cer分别为误差源路段ys1,ys2,…,ysr的影响向量,而ΔX为关键向量.
从式(2)可看出,关键向量是对影响向量的线性叠加,对于路网中每个路段来说,关键系数是对影响系数的线性叠加.因此,多个误差源路段流量检测器误差对路网流量推算结果的影响是单个误差源路段影响系数的线性叠加,同时也是单个误差源路段流量检测器误差影响的线性叠加.
3 基于灵敏度理论的检测器误差分析示例
基于第2节的检测器误差灵敏度分析方法,本节以方格式路网为实例分析检测器误差对推算流量的影响.
3.1 示例路网
首先建立一个简化的3×3方格式路网,每个路口均采取典型十字交叉口,具体布局如图2所示.
从图2可以看到,实例路网共有48条路段,36条出口路段,12条只进路段,12条只出路段.用Oin表示只进路段集,Oout表示只出路段集,则
Oin={1,3,5,10,11,24,25,38,39,44,46,48}
Oout={2,4,6,7,14,21,28,35,42,43,45,47}
3.2 检测器布设方案选择和交叉口转弯比
根据加权NSLP模型[8],对于实例路网,要保证全网推算流量的唯一性,只要满足

图2 3×3方格式路网
本文中选取了只进方案和只出方案进行实例分析:①只进方案,在Oin布设检测器的检测器布设方案;②只出方案,在Oout布设检测器的检测器布设方案.
经过检验只进方案和只出方案下的系数矩阵C1的秩均为48,即两种方案均可唯一推算路网所有路段流量.
为简化计算,假定所有交叉口进口道的转弯比都相同,并将转弯比定为左转0.1、直行0.6、右转0.3.
3.3 检测器误差的设定
基于第2节的检测器误差灵敏度分析方法,为简化分析,假设误差源路段的流量误差为单位1(当误差是单位1的倍数时关键系数也呈倍数增长).对单个误差源路段,令Δb=1,影响向量和关键向量均为Ce;对多个误差源路段(假设有r个误差源路段),令Δbs1=Δbs2=…=Δbsr=1,此时误差源路段ys1,ys2,…,ysr的影响向量分别为Ce1,Ce2,…,Cer,关键向量ΔX的表达式为
3.4 只进方案检测器误差的灵敏度分析实例
3.4.1单个误差源路段

表2 只进方案误差源路段1关键系数
根据表2和实例路网的底图,画出误差源路段1对各推算路段关键系数的三维柱状图,如图3所示.

图3 只进方案误差源路段1的关键系数三维柱状图
同理可以画出误差源路段3的关键系数柱状图,如图4所示.
由图3和图4可知,对于只进方案单个误差源路段时,所有路段误差都小于误差源路段的检测器误差,并且在整体上路段的流量推算误差随着与误差源路段距离的增加而减少.
3.4.2多个误差源路段
两列影响系数分别对应误差源路段1、3检测器误差对推算路段流量推算结果的影响,两列影响系数之和就是关键系数.关键系数柱状图如图5所示.

图4 只进方案误差源路段3的关键系数三维柱状图
由图5可知,对于只进方案,关键系数均非负并不超过单位1,说明所有推算路段与误差源路段的流量变化方向一致,所有路段误差都小于误差源路段的检测器误差,并且多个检测器误差的整体影响效果是单个检测器误差影响效果的线性叠加.
3.5 只出方案检测器误差的灵敏度分析实例
只出方案的实例分析与只进方案类似,对单个误差源路段选择2和4,对多个误差源路段选择相邻路段{2,4},分别画出关键系数柱状图,如图6~8所示.
由图6~8可知,对于只出方案,多个检测器误差的整体影响仍是单个检测器误差影响效果的线性叠加,但部分推算路段关键系数出现负值,也有关键系数绝对值超过单位1的,说明部分推算路段与误差源路段的流量变化方向相反,部分路段误差会大于误差源路段的检测器误差.在整体上,路段的流量推算误差随与误差源路段距离的增加而增加.
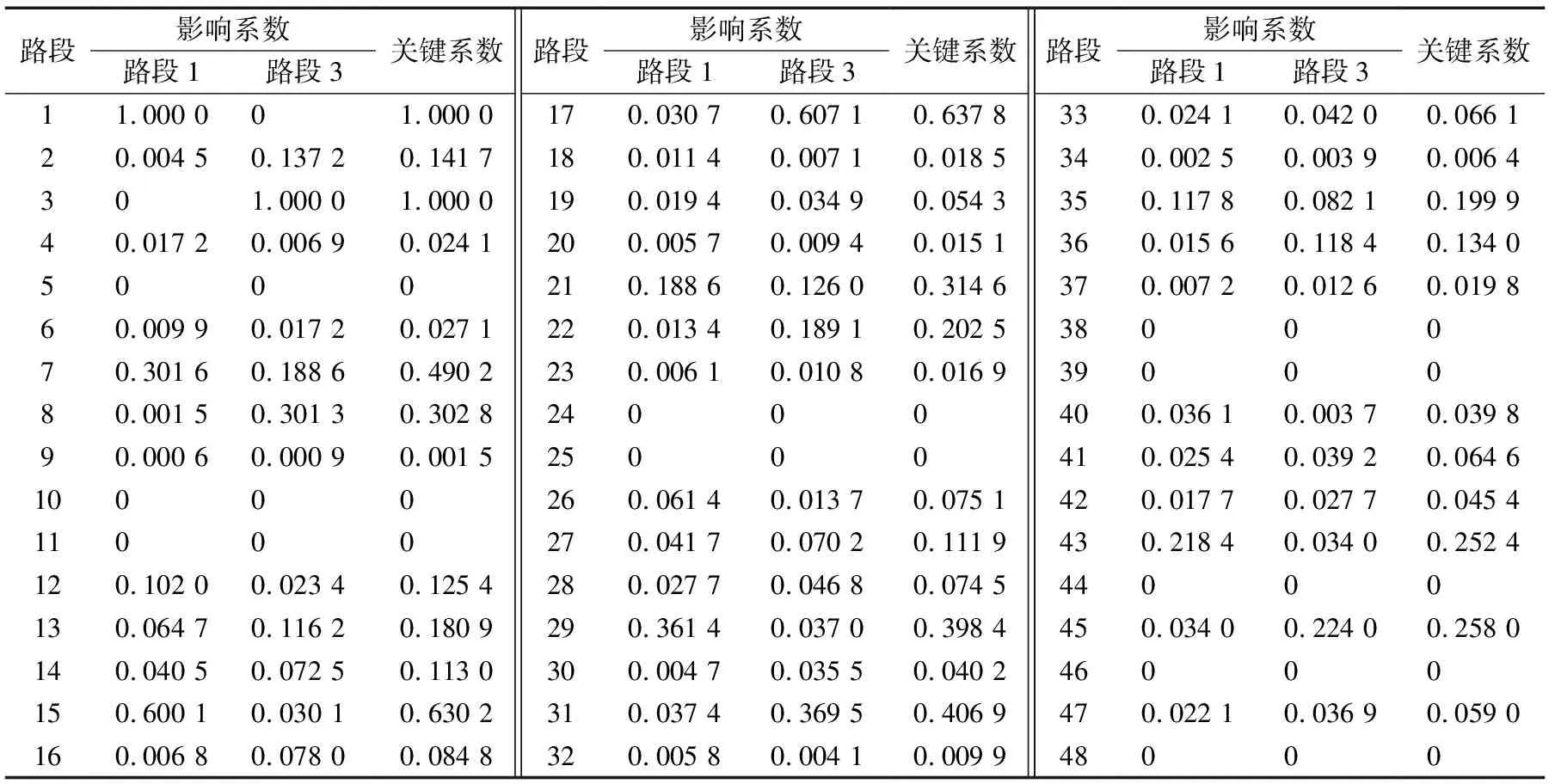
表3 只进方案误差源路段1、3的影响系数和关键系数

图5 只进方案误差源路段1、3的关键系数三维柱状图

图6 只出方案误差源路段2的关键系数三维柱状图

图7 只出方案误差源路段4的关键系数三维柱状图

图8 只出方案误差源路段2、4的关键系数三维柱状图
3.6 交叉口转弯比不同情况下的分析
以上是在所有交叉口进口道转弯比相同假设下的示例分析.在实际路网中,不同交叉口的转弯比往往不同,这里对这一情况给出简单示例.
随机生成3×3方格式路网的路段转弯比,任意转弯比范围都是[0,1],同时满足左转、直行、右转转弯比之和为1,如表4所示.
在其他条件与前文相同的前提下,采用如表4所示的随机转弯比数据,分别计算只进方案下误差源路段1、误差源路段3和误差源路段1、3的关键系数,如图9~11所示.
由图9~11可得,对于只进方案,随机转弯比下误差源路段1、3的关键系数是误差源路段1和3影响系数的叠加.对于只出方案,经过验证也得到了同样的结论,这里不再赘述.可见,在各交叉口转弯比不同的情况下,多个检测器误差的整体影响仍是单个检测器误差影响效果的线性叠加.

表4 3×3方格式路网路段随机转弯比

图9 随机转弯比下误差源路段1的关键系数三维柱状图
3.7 检测器误差分析实例小结
对比两个方案的分析结果可以看出:只进方案和只出方案下,多个检测器误差的整体影响都是单个检测器误差影响效果的线性叠加.对于只进方案,关键系数均非负,所有路段误差均小于误差源路段的检测器误差,而对于只出方案,部分路段关键系数超过单位1,推算误差大于误差源路段的检测器误差.

图10 随机转弯比下误差源路段3的关键系数三维柱状图

图11 随机转弯比下误差源路段1、3的关键系数三维柱状图
4 结语
本文采用灵敏度分析方法研究检测器误差对路网流量推算的影响.将灵敏度分析方法作为检测器误差分析的通用方法,定义影响系数和关键系数来反映误差源路段检测器误差对推算路段流量推算结果的影响.影响系数反映了单个误差源路段检测器误差对推算路段流量推算结果的影响,关键系数是影响系数线性之和,反映了所有误差源路段检测器误差对推算路段流量推算结果的影响.推导结果表明,多个检测器误差的整体影响是单个检测器误差的线性叠加.
以方格式路网为示例,分只进方案和只出方案,计算推算路段受检测器误差影响的关键系数.结果表明,两种方案下检测器误差的传递规律有所不同.对于只进方案,所有路段误差均小于误差源路段的检测器误差,并且变化方向与误差源路段一致;对于只出方案,推算路段随误差源路段的流量变化方向不定,并且部分推算路段误差大于误差源路段的检测器误差.
猜你喜欢
中国交通信息化(2019年9期)2019-11-16
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
中国交通信息化(2019年11期)2019-08-13
中国交通信息化(2019年1期)2019-03-26
中国交通信息化(2019年2期)2019-03-25
火力与指挥控制(2018年10期)2018-11-13
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
环球飞行(2018年7期)2018-06-27
