基于矢量控制的异步电机自抗扰控制
2019-06-11 06:39贺虎成孙磊张玉峰朱群
电机与控制学报 2019年4期
关键词:数学模型
贺虎成 孙磊 张玉峰 朱群
摘 要:针对异步电机矢量控制系统在负载变化和电机参数变化时转速易受较大影响的问题,研究了采用自抗扰控制器(ADRC)对负载扰动和电机参数变化进行估计和补偿的方法。根据自抗扰控制器的数学特征和异步电机的数学模型,采用扩张状态观测器(ESO)对电机模型的参数摄动和变量耦合项进行观测并补偿,确定了矢量控制系统中自抗扰转速环控制器、自抗扰磁链环控制器、自抗扰d轴电流环控制器和自抗扰q轴电流环控制器的形式。仿真和实验结果表明,与传统的比例积分控制器(PI)相比,ADRC控制器对系统负载扰动和电机参数变化具有较好的鲁棒性和动态性能。
关键词:异步电机;数学模型;矢量控制;自抗扰控制器
中图分类号:TM 343
文献标志码:A
文章编号:1007-449X(2019)04-0120-06
0 引 言
异步电机具有结构简单、坚固耐用、运行可靠等优点,在工业应用场合得到了非常广泛的应用[1-2]。矢量控制方式的引入,实现了转矩与磁链的解耦控制,使异步电机变频调速性能达到与直流电机控制性能相媲美的程度[3-4]。然而,在实际应用过程中,传统的PI矢量控制系统受负载变化及电机参数变化的影响较大,因此,控制性能受到很大影响。滑模变结构控制[5-6]、自适应控制[7-8]、预测控制[9-10]、内模控制[11-12]等现代控制策略在交流电机变频控制研究领域受到了广泛关注。但是,滑模变结构控制存在“抖振”现象,对于矢量控制系统在低速时会引起较大转矩脉动;自适应控制算法复杂,对处理器性能要求较高;预测控制算法存在模型预测精度不高、滚动优化策略少、反馈校正方法单调等问题;内模控制器的固定时间常数在鲁棒性与快速性之间存在矛盾。
自抗扰控制器[13-18]是一种新型的非线性控制器,通过对系统内、外扰动的实时估计并补偿,结合非线性控制策略,从而系统获得更好的鲁棒性和动态性能。
鉴于此,本文研究了一种基于矢量控制的异步电机自抗扰控制方案。将电机模型的参数摄动和变量耦合项视为系统扰动,采用扩张状态观测器(extended state observer, ESO)进行观测并补偿,设计了异步电机矢量控制系统的自抗扰转速环控制器、自抗扰磁链环控制器和自抗扰电流环控制器。通过Matlab/SIMULINK仿真环境和异步电机变频调速实验样机,对基于自抗扰控制器的矢量控制系统和基于PI控制器的矢量控制系统进行了对比研究,仿真及实验结果均表明ADRC(active disturbance rejection controller)系统的各方面性能均优于PI系统。
1 异步电机动态数学模型
基于转子磁场定向的矢量控制理论,异步电机在同步旋转正交坐标系下的动态数学模型可用四阶非线性微分状态方程组描述为:
式(1)表明,定子d轴电流微分方程中存在项ω1isq,所以定子d轴电流受定子q轴电流影响;同理,q轴电流也受d轴电流影响,即存在交叉耦合。k3ψrdisq和Lmψrdωr/(σLr)也是交叉耦合项。根据ADRC的原理,若将这些耦合项当作系统的内扰,利用扩张状态观测器ESO进行观测,再加以补偿,则能够实现转矩和磁链的完全解耦。
2 自抗扰控制器设计
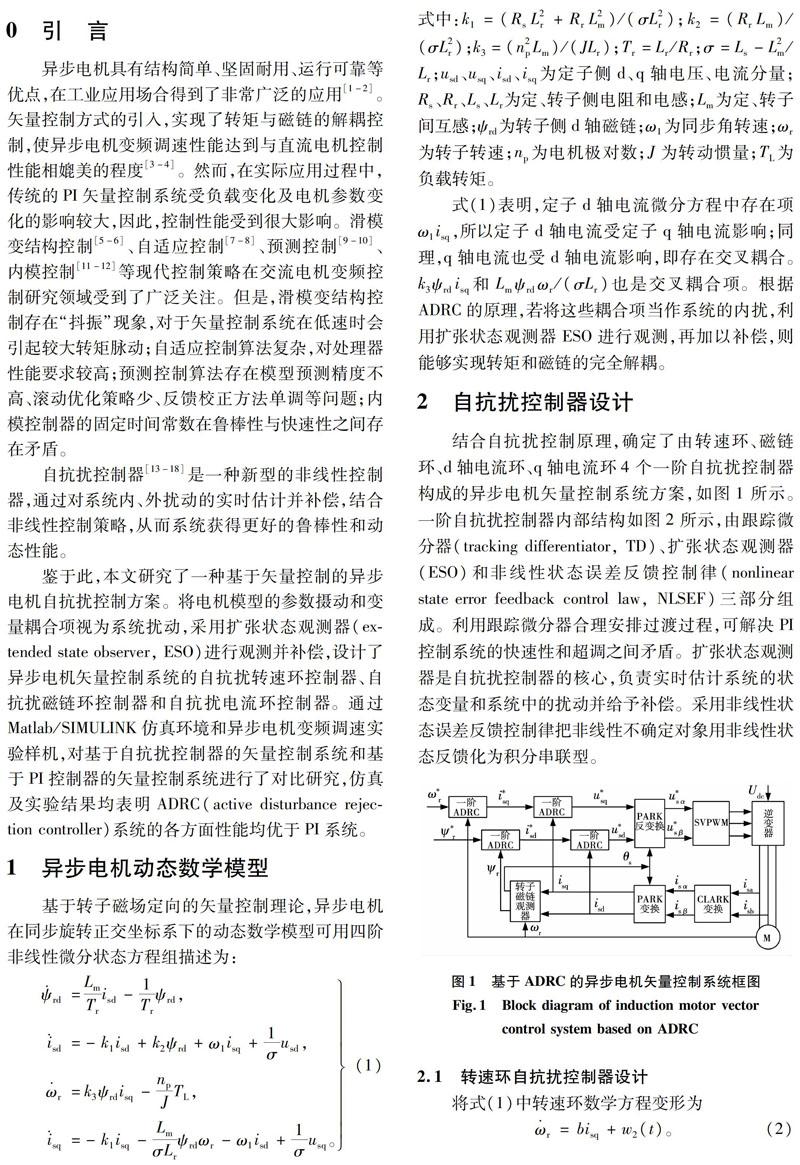
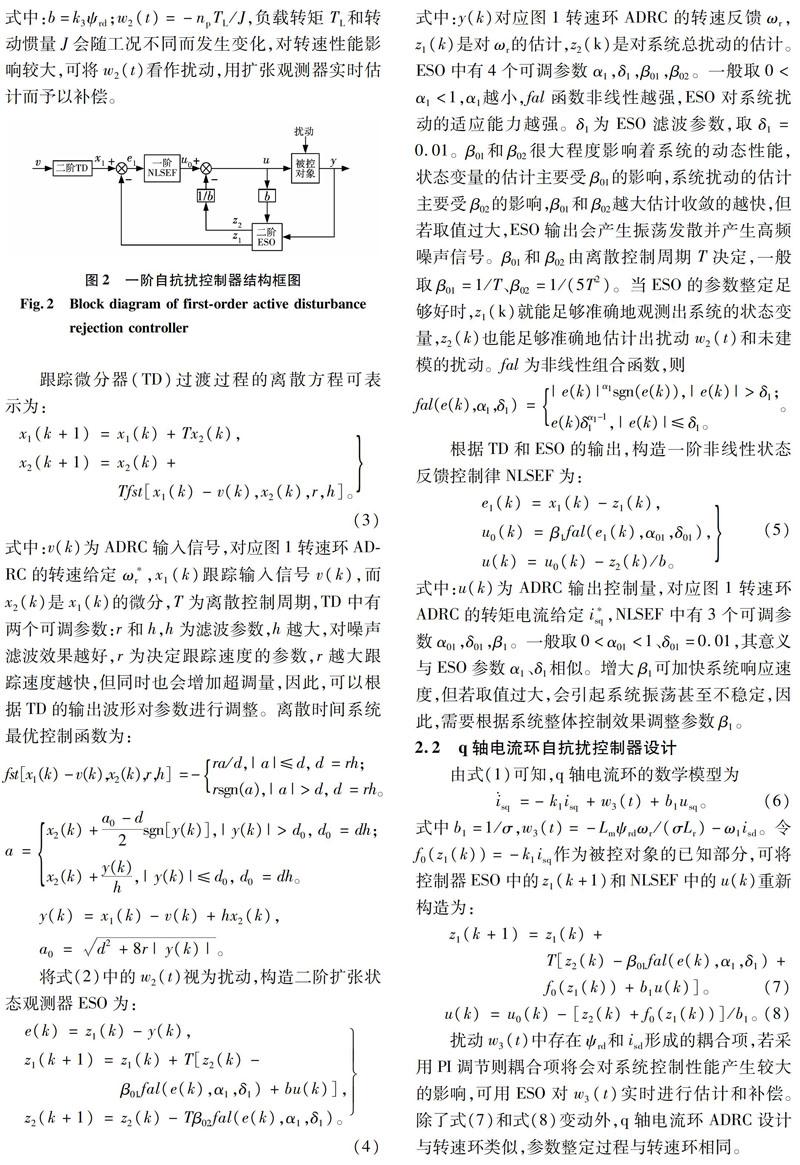
结合自抗扰控制原理,确定了由转速环、磁链环、d轴电流环、q轴电流环4个一阶自抗扰控制器构成的异步电机矢量控制系统方案,如图1所示。一阶自抗扰控制器内部结构如图2所示,由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(ESO)和非线性状态误差反馈控制律(nonlinear state error feedback control law, NLSEF)三部分组成。利用跟踪微分器合理安排过渡过程,可解决PI控制系统的快速性和超调之间矛盾。扩张状态观测器是自抗扰控制器的核心,负责实时估计系统的状态变量和系统中的扰动并给予补偿。采用非线性状态误差反馈控制律把非线性不确定对象用非线性状态反馈化为积分串联型。
2.1 转速环自抗扰控制器设计
将式(1)中转速环数学方程变形为
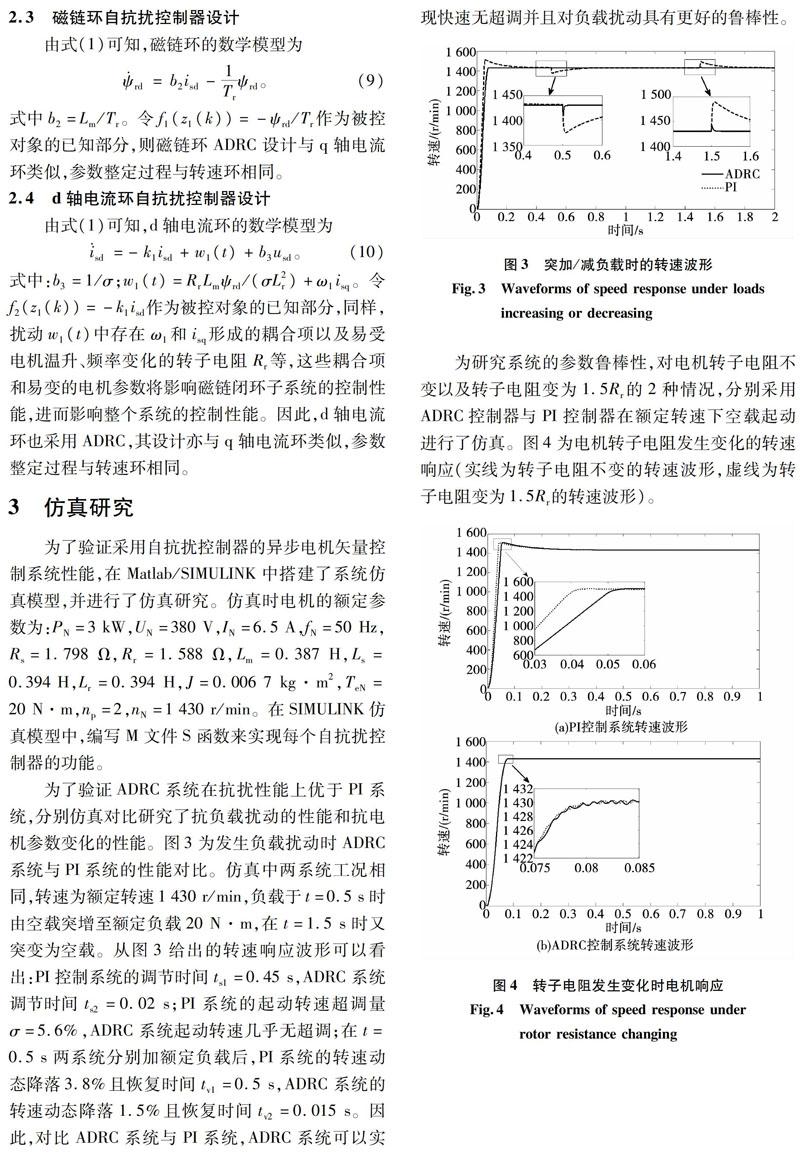
为了验证ADRC系统在抗扰性能上优于PI系统,分别仿真对比研究了抗负载扰动的性能和抗电机参数变化的性能。图3为发生负载扰动时ADRC系统与PI系统的性能对比。仿真中两系统工况相同,转速为额定转速1 430 r/min,负载于t=0.5 s时由空载突增至额定负载20 N·m,在t=1.5 s时又突变为空载。从图3给出的转速响应波形可以看出:PI控制系统的调节时间ts1=0.45 s,ADRC系统调节时间ts2=0.02 s;PI系统的起动转速超调量σ=5.6%,ADRC系统起动转速几乎无超调;在t=0.5 s两系统分别加额定负载后,PI系统的转速动态降落3.8%且恢复时间tv1=0.5 s,ADRC系统的转速动态降落1.5%且恢复时间tv2=0.015 s。因此,对比ADRC系统与PI系统,ADRC系统可以实现快速无超调并且对负载扰动具有更好的鲁棒性。
为研究系统的参数鲁棒性,对电机转子电阻不变以及转子电阻变为1.5Rr的2种情况,分别采用ADRC控制器与PI控制器在额定转速下空载起动进行了仿真。图4为电机转子电阻发生变化的转速响应(实线为转子电阻不变的转速波形,虚线为转子电阻变为1.5Rr的转速波形)。
由图4可知,当转子电阻发生变化时,PI控制系统的转速动态性能发生明显变化,ADRC控制系统在转子电阻变化前后转速曲线几乎重合,系统所受影响很小。由于ADRC控制器能够有效地观测到系统参数变化引起的模型变化,并加以实时补偿和控制。因此,当电机参数发生变化时,ADRC系统具有更好的鲁棒性。
4 实验研究
异步电机矢量控制系统实验样机框图如图5所示,主回路采用交-直-交变频电路,由三相二极管整流和三相桥式逆变两部分组成;控制电路以TMS320F28335为核心,完成信号采集、控制信号处理、算法实现等,母线电压检测电路将采集直流母线电压,实现过压保护、欠压保護等,光耦驱动电路将DSP输出的PWM波形进行整形、功率放大并隔离强、弱电信号,电流检测电路将逆变器输出的三相电流经霍尔传感器采集后,调理成适合DSP采集的电压信号,编码器及其调理电路用于测量电机转速,上位机和面板实现人机交互和远程通信功能。
实验时电机的额定参数为:PN=1.1 kW,UN=380 V,IN=2.7 A,fN=50 Hz,Rs=6.75 Ω,Rr=5.82 Ω,Lm=0.223 H,Ls=0.223 H,Lr=0.328 H,TeN=7.5 N·m,np=2,nN=1 400 r/min。
利用所搭建的异步电机矢量控制系统实验样机,对采用ADRC控制器和采用PI控制器分别进行了实验。图6所示为给定转速为1 200 r/min,突加/减相同负载时采用ADRC控制器和采用PI控制器的转速响应实验波形。从图可以看出,ADRC控制器较PI控制器的电机转速变化小、恢复时间短,加快了电机的动态响应过程,验证了理论分析可行性。
5 结 论
本文在自抗扰控制器原理的基础上分析设计了由4个一阶自抗扰控制器构成的异步电机矢量控制系统。通过仿真和实验对比了ADRC控制器和传统PI控制器的抗扰性能。仿真和实验结果表明,ADRC控制器较PI控制器增强了系统的抗负载扰动和抗电机参数变化的能力,提高了系统的控制精度及鲁棒性。
参 考 文 献:
[1]刘和平, 汤梦阳, 刘庆, 等. 基于定子磁链模型的异步电机转子时间常数辨识[J].电机与控制学报, 2014, 18(1): 56.
LIU Heping, TANG Mengyang, LIU Qing,et al. Rotor time constant identification of induction machine based on stator flux linkage model[J]. Electric Machines and Control, 2014, 18(1): 56.
[2]丁树业,关天宇,崔广慧.船舶驅动用异步电机三维温度场研究[J]. 哈尔滨理工大学报, 2015, 20(5):1.
DING Shuye, GUAN Tianyu, CUI Guanghui. The research on 3D temperature field of asynchronous motor for ship drive[J]. Journal of Harbin University of Science and Technology,2015,20(5):1.
[3]杜永红, 李哲峰, 刘志刚. 异步电机间接磁场定向控制双闭环系统[J].电工技术学报, 2009, 24(5): 24.
DU Yonghong, LI Zhefeng, LIU Zhigang. Indirect field orientation double close loop system of induction motors[J]. Transactions of China Electrotechnical Society, 2009, 24(5): 24.
[4]杨淑英, 丁大尉, 李曦, 等. 基于反电动势滑模观测器的异步电机矢量控制[J].电机与控制学报, 2016, 20(10): 23.
YANG Shuying, DING Dawei, LI Xi, et al. Back-EMF based sliding mode observer for vector control of induction machine[J]. Electric Machines and Control, 2016, 20(10): 23.
[5]许叙遥, 林辉. 基于动态滑模控制的永磁同步电机位置速度一体化设计[J].电工技术学报, 2014, 29(5): 77.
XU Xuyao, LIN Hui. Integrated design for permanent magnet synchronous motor servo systems based on dynamic sliding mode control[J]. Transactions of China Electrotechnical Society, 2014, 29(5): 77.
[6]ZHANG Xiaoguang, SUN Lizhi, ZHAO Ke,et al. Nonlinear speed control for PMSM system using sliding-model control and disturbance compensation techniques[J]. IEEE Transactions on Power Electronics, 2013, 28(3): 1358.
[7]CHIANG HH, HSU K C, LI I H. Optimized adaptive motion control through an SOPC implementation for linear induction motor drives[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(1): 348.
[8]梅从立, 殷开婷, 黄文涛, 等. 基于数据驱动的感应电机多模型逆自适应解耦控制[J].控制与决策, 2016, 31(6): 1037.
MEI Congli, YIN Kaiting, HUANG Wentao, et al. Data-driven adaptive decoupling control of induction motors using multi-model inversion[J]. Control and Decision, 2016, 31(6): 1037.
[9]SCOLTOCK J, GEYER T, MADAWALA U K. A comparison of model predictive control schemes for MV induction motor drives[J]. IEEE Transactions on Industrial Informatics, 2013, 9(2): 909.
[10]孙伟, 于泳, 王高林, 等. 基于矢量控制的异步电机预测电流控制算法[J].中国电机工程学报, 2014, 34(21): 3448.
SUN Wei, YU Yong, WANG Gaolin, et al.A predictive current control scheme for induction motor with vector control[J]. Proceedings of the CSEE, 2014, 34(21): 3448.
[11]尹忠刚, 牛剑博, 钟彦儒. 采用免疫算法的感应电机内模控制策略[J].中国电机工程学报, 2013, 33(24): 97.
YIN Zhonggang, NIU Jianbo, ZHONG Yanru. Research on an internal model control strategy for induction motors using the immune algorithm[J]. Proceedings of the CSEE, 2013, 33(24): 97.
[12]CHOU H W, CHEUNG N C. Disturbance and response time improvement ofsubmicrometer precision linear motion system by using modified disturbance compensator and internal model reference control[J]. IEEE Transactions of Industrial Electronics, 2013, 60(1): 139.
[13]白晶, 李华德, 郝智红. 自抗扰控制器ADRC实现的感应电机变频调速系统[J].电工技术学报, 2005, 20(6): 73.
BAI Jing, LI Huade, HAO Zhihong. Induction-motor variable-frequency speed regulation system implemented by auto-disturbances-rejection controller[J]. Transactions of China Electrotechnical Society, 2005, 20(6): 73.
[14]韩京清. 自抗扰控制技术-估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008.
[15]谢树林, 李华德, 郝智红, 等. 自抗扰控制器解决变频调速系统参数鲁棒性问题[J].电工技术学报, 2005, 20(9): 61.
XIE Shulin, LI Huade, HAO Zhihong, et al. Parameter robustness in the induction motor variable-frequency speed regulation system implemented by auto-disturbances-rejection controller[J]. Transactions of China Electrotechnical Society, 2005, 20(9):61.
[16]HAN J. From PID toactive disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900.
[17]李潔, 史伟, 钟彦儒. 基于自抗扰控制器的异步电机鲁棒控制研究[J].西安理工大学学报, 2008, 24(4): 431.
LI Jie, SHI Wei, ZHONG Yanru. Research on robust control of induction machines based on auto disturbance rejection controller[J]. Journal of Xian University of Technology, 2008, 24(4): 431.
[18]刘军锋, 李叶松, 万淑芸. 基于自抗扰控制器的感应电机变频调速系统[J].华中科技大学学报, 2008, 36(6): 47.
LIU Junfeng, LI Yesong, WAN Shuyun. Induction motor variable-frequency speed regulation system based on auto-disturbances-rejection controller[J]. Journal Huazhong University of Science and Technology, 2008, 36(6): 47.
(编辑:刘琳琳)
猜你喜欢
新高考·高二数学(2022年3期)2022-04-29
中学生学习报(2022年16期)2022-04-16
新高考·高二数学(2017年3期)2017-08-17
东方教育(2017年3期)2017-05-18
教学月刊·小学数学(2016年11期)2016-12-09
中学数学杂志(初中版)(2016年5期)2016-11-01
中学数学杂志(初中版)(2016年5期)2016-11-01
湖南大学学报·自然科学版(2014年3期)2014-12-30
中学生数理化·高二版(2008年6期)2008-11-12