自适应模糊PID仓储温度控制系统的仿真
2019-06-18 13:35舒大松伍子祺
唐山师范学院学报 2019年3期
舒大松,伍子祺
自适应模糊PID仓储温度控制系统的仿真
舒大松1,伍子祺2
(1. 湖南广播电视大学 机电工程系,湖南 长沙 410007;2. 武汉市第十一中学,湖北 武汉 430030)
仓储室内温度系统具有非线性、时滞性、大惯性、多变量耦合性的特征,采用传统控制方法效果不太理想。将自适应模糊PID控制策略应用到物流仓储温度控制系统,并通过Matlab/Simulink平台建立仿真模型,仿真试验结果表明,自适应模糊PID温度控制系统显示出优良的性能。
自适应模糊控制;PID;仓储温度
1 仓储温度控制系统方案设计
针对不同地区、不同季节、不同食品类别、不同保鲜要求,储藏室的温度需要动态调整并且精确控制。仓储温度系统具有明显的非线性特征,同时温度传感器测量并传输数据时存在延时性特征、物流仓储室内温度控制系统近似于一阶惯性纯滞后模型,传递函数如式(1)所示。


2 自适应模糊PID温度控制器设计
PID是经典的闭环控制方式之一,将被控对象偏差的比例、微分、积分进行线性组合得到控制量。PID控制系统的结构框图如图1所示。

图1 PID控制系统结构
控制系统数学模型如式(2)所示。

式中,p表示比例系数、i表示积分系数、d表示微分系数[1]。比例系数p主要影响系统响应速度和稳定性[2]。如果p值设置过大,系统的响应过程中会出现严重的超调,甚至振荡,系统的稳定性变差。如果p值设置过小,调节精度下降,响应时间太长,控制精度下降。积分系数i作用在于降低系统的稳态误差。如果i值设置太大,控制系统会出现大幅度的超调,振荡频率加快,将大幅削弱系统的稳定性。微分系数d主要影响系统的动态特性,对系统稳态误差、响应速度、超调量有综合的作用。d值设置过大,会限制i、p值的调节效果,大幅削弱系统的抗干扰能力。
因此,p、i、d值对系统的稳定性、响应速度、超调量、精度等方面具有较大的影响。为实现精确高效的控制效果,PID控制系统的这三个参数需要协调修正,但缺少严格的公式可以依据,需要根据经验进行模糊调整。模糊控制器就是为了实现这一功能。
模糊控制器的一般结构主要由模糊化[3]、知识库、模糊推理、清晰化等四部分组成。
[10]technology is getting better=>advances in technology(选自 Halliday&Matthiessen 2004/2008:656-657)
模糊化是将输入的精确量转换为模糊量[4],然后进行尺度变换,使其落入到模糊集的范围内,从而用相应的模糊集合数表示,如(3)式所示。

知识库主要由反映控制专家经验知识的规则库与反映应用领域的数据库组成。数据库包含了具体应用领域中的知识和要控制的目标,由语言变量隶属度函数、变换因子以及模糊空间的量化等级组成。规则库主要是用模糊量表示的模糊规则。
模糊推理是模拟人类模糊思维的方式,通过模糊逻辑中蕴含的关系及推理规则编辑模糊语句实现。
清晰化也称为反模糊化,是对模糊控制量的反模糊化处理,将模糊量变换为模糊集合中论域范围内的模拟量,再通过尺度变化将清晰量变换成实际被控对象能够接受的输入量。
利用模糊控制理论的优势[5],设计自适应模糊PID控制器,具体结构如图2所示。

图2 模糊自适应PID控制器





表1 三参数模糊控制器的控制规则
(续表1)
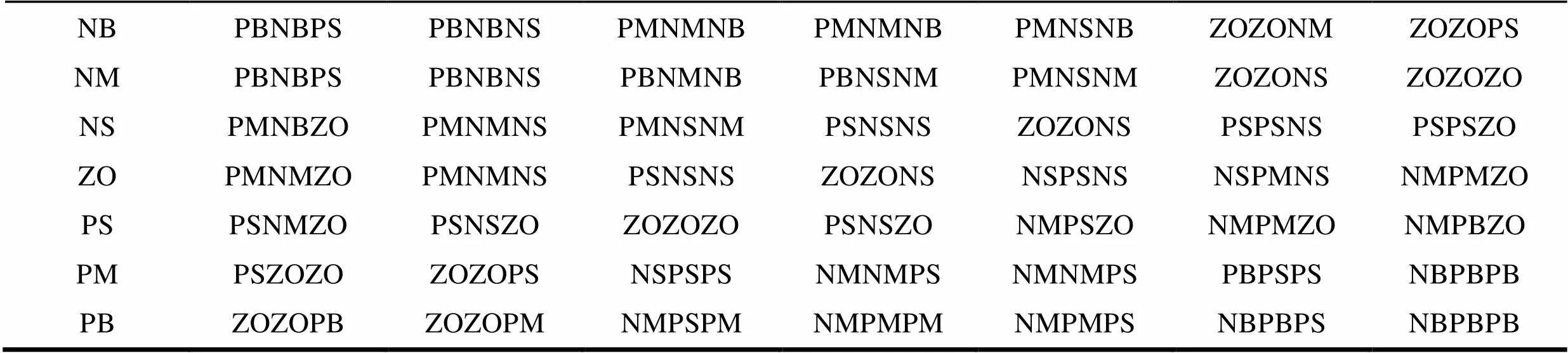
NBPBNBPSPBNBNSPMNMNBPMNMNBPMNSNBZOZONMZOZOPS NMPBNBPSPBNBNSPBNMNBPBNSNMPMNSNMZOZONSZOZOZO NSPMNBZOPMNMNSPMNSNMPSNSNSZOZONSPSPSNSPSPSZO ZOPMNMZOPMNMNSPSNSNSZOZONSNSPSNSNSPMNSNMPMZO PSPSNMZOPSNSZOZOZOZOPSNSZONMPSZONMPMZONMPBZO PMPSZOZOZOZOPSNSPSPSNMNMPSNMNMPSPBPSPSNBPBPB PBZOZOPBZOZOPMNMPSPMNMPMPMNMPMPSNBPBPSNBPBPB
3 仿真实验分析
在MATLAB编程窗口中输入“fuzzy”,按下enter键,启动MATLAB模糊控制工具箱,通过菜单栏edit中“Add Variable”设置模糊控制器的输入输出。
={-7,-6,…,0,…,6,7}
分别对应模糊语言控制的七种状态,输入量相应划分为正大(PB)、正中(PM)、正小(PS)、零(ZO)、负小(NS)、负中(NM)、负大(NB)7个量化等级。对X论域采用分辨率极强的三角形分布隶属函数对输入数据进行拟合。

L1:If E is NB and EC is NB thenp is PB andi is NB andd is PS
L2:If E is NB and EC is NM thenp is PB andi is NB andd is NS
L48:If E is PB and EC is PM thenp is NB andi is PB andd is PS
L49:If E is PB and EC is PB thenp is NB andi is PB andd is PB
在模糊控制工具箱中,由菜单栏“view”中的“rules”输入模糊控制规则,由“surface”获得模糊控制器的输出特性视图,进而观察输入量和输出量在全范围内连续变化所对应的关系,如图4、图5、图6所示。

图4 Kp模糊控制器输出特性

图5 Ki模糊控制器输出特性

图6 Kd模糊控制器输出特性
将模糊控制程序通过模糊控制工具箱“file”菜单中的“import”输出到“workplace”工作空间,与simulink中的模糊逻辑模块建立连接。选取阶跃信号来模拟温度信号进行仿真实验,结果如图7所示。

图7 自适应模糊PID控制器与PID控制器
自适应模糊PID控制与PID控制的响应速度相当,而在超调量、稳态误差、精度方面,自适应模糊PID控制明显优于PID控制。
4 结论
模糊自适应PID控制器的原理实际上仍属于PID控制,通过借助控制经验自动修正PID控制系统参数,提高PID控制性能。仿真实验结果表明,模糊自适应PID仓储温度控制器具有优良的控制效果。
[1] 付瑞玲,乐丽琴.基于MATLAB/Simulink的PID参数整定[J].工业控制计算机,2013,26(8):75-76.
[2] 王庆兰,石学文,张同对.临界比例度法整定PID控制器参数[J].唐山师范学院学报,2016,38(5):58-60.
[3] 马军爽,郭耀华,王维.模糊-PID双模控制器在水位控制中的应用[J].唐山师范学院学报,2007,29(5):104- 106.
[4] 曾光奇.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2012:66-68.
[5] 李岳林,谢安平,龚宏义,等.基于MATLAB的轿车电动天窗防夹系统建模与仿真[J].公路与汽运,2014,(6):4-8.
[6] 赵丽,朱学军,白雪萍,等.杏鲍菇栽培环境湿度建模与控制器设计及仿真[J].中国农机化学报,2016,37(6):79- 83.
[7] 文生平,赵国平,蔡康雄.一种变论域模糊控制自适应算法[J].控制理论与应用,2009,26(3):265-268.
[8] 潘玉成,林高飞,陈小利,等.基于模糊专家控制的茶叶炒制温度控制系统[J].食品与机械,2016,32(11):79-84.
Simulation of Adaptive Fuzzy PID Storage Temperature Control System
SHU Da-song1, WU Zi-qi2
(1. Department of Mechanical and Electrical Engineering, Hunan Radio and Television University, Changsha 410007, China; 2. Wuhan No. 11 Middle School, Wuhan 430030, China)
The indoor temperature system of storage has the characteristics of nonlinearity, time lag, large inertia and multivariable coupling. The traditional control method is not ideal. In this paper, an adaptive fuzzy PID control strategy is proposed, which is applied to the logistics storage temperature control system. The simulation model is established by Matlab/Simulink platform. The simulation results show that the adaptive fuzzy PID temperature control system has excellent performance.
adaptive fuzzy control; PID; storage temperature
TP399
A
1009-9115(2019)03-0072-04
10.3969/j.issn.1009-9115.2019.03.020
湖南省教育厅科研资助项目(14C0780)
2018-09-18
2019-01-06
舒大松(1962-),男,湖南长沙人,教授,研究方向为人工智能与自动化控制。
(责任编辑、校对:田敬军)
猜你喜欢
电子设计工程(2022年15期)2022-08-17
厦门大学学报(自然科学版)(2022年4期)2022-07-15
现代装饰(2020年7期)2020-07-27
科技创新与应用(2019年17期)2019-06-09
数字技术与应用(2017年6期)2017-09-08
科技创新与应用(2017年1期)2017-05-11
商(2016年28期)2016-10-27
现代电子技术(2014年10期)2014-07-19
科技致富向导(2013年21期)2013-12-10