机器人辅助经颅磁刺激线圈定位的导航路径规划与避障算法研究
2019-06-19 03:17靳静娜刘志朋
医疗卫生装备 2019年6期
王 贺,王 欣,靳静娜,李 颖,刘志朋,殷 涛,2*
(1.中国医学科学院北京协和医学院生物医学工程研究所,天津 300192;2.中国医学科学院神经科学中心,北京 100730)
0 引言
经颅磁刺激(transcranial magnetic stimulation,TMS)是一种无痛的非侵入性的大脑神经刺激方法[1-3],近30 a来,已被应用于临床和科研领域。大量研究表明TMS对抑郁症、脑卒中、疼痛等都具有较好的治疗效果[4-9]。目前,TMS已经在美国和加拿大取得了食品药品监督管理局(Food and Drug Administration,FDA)认证。但是,因为TMS实验操作复杂且治疗效果存在较大的个体差异,目前TMS还未被广泛接受[10-11]。
在实施TMS的过程中,刺激线圈被放置于被试头部刺激区域,基于电磁感应原理,通过刺激线圈产生的脉冲磁场在大脑皮层产生感应电流,进而刺激大脑皮层神经。因此磁刺激线圈的定位精度是影响TMS治疗效果个体差异的重要原因之一[12-14]。最初,在没有导航系统的辅助下,实验人员通过手持磁刺激线圈的方法无法将刺激线圈精确地定位于被试的头部刺激区域[10-12]。为了解决该问题,目前国际上已经开发出了神经定位导航技术,用于更加稳定、准确地定位刺激线圈。基于被试头部的三维影像,利用光学跟踪设备,神经导航技术可以在重建的大脑三维模型上实时地显示TMS线圈的实际刺激位置[13-14]。虽然神经导航技术可以提高刺激线圈的定位精度,但是刺激线圈的质量通常超过2 kg(如图1所示),实验操作人员难以在每个治疗过程中手持磁刺激线圈超过30 min。机器人辅助TMS线圈定位的方法可有效解决上述问题,对于TMS的临床应用具有重要意义,已成为近年来的研究热点。
安全性是机器人辅助TMS在临床上应用的最重要的前提。目前,国际上已有辅助TMS线圈定位的机器人实验系统的报道,而且相关文献已经证明机器人辅助TMS线圈定位的方法可以显著提高刺激精度[15-18]。2011年Richter等[17]基于工业6轴机器人(Adept Viper s850)设计了TMS机器人系统,然而,由于该系统配备了工业机器人普遍使用的用于高速运动的控制器,其安全性备受质疑。2012年Zorn等[18]基于结构运动方案设计了7轴TMS专用机器人系统。以上2种机器人系统的架构和实验流程基本相同,均为实验操作人员将刺激线圈安装在机器人的末端执行器上,使用NDI公司生产的双目相机实现线圈导航。完成系统校准后,机器人将刺激线圈非常精确地直接定位至选定的目标刺激区域[19-22]。
基于工业机器人搭建安全可靠的TMS机器人系统,必须实现以下2个条件的精准控制:(1)精确控制刺激线圈和被试头部之间的接触力。(2)基于避障算法精确地控制刺激线圈的行进路径,确保刺激靶点在定位和切换的过程中线圈和被试头部不会产生碰撞。目前,已经有实现刺激线圈和被试头部之间接触力控制的文献报道[17-18]。本文尝试使用机器人路径规划的方法精确地控制刺激线圈的行进路径,并给出了相应的避障算法,以提高机器人辅助TMS系统的安全性。
1 TMS机器人系统的工作流程
图1展示了机器人辅助TMS路径规划的工作流程,具体如下:(1)获取被试的MRI图像以重建被试大脑和头部的三维模型,通过绑带将光学定位刚体(rigid body 8700339,NDI)固定于被试头部,通过NDI相机实时测量头部位置和方向。(2)将解剖学标记放在被试头部的三维模型上以完成被试注册。(3)通过固定装置将刺激线圈固定于机器人法兰末端,获得机器人的基准坐标系到线圈的工具坐标系的坐标变换关系。(4)将NDI固定在刺激线圈上完成线圈校准。(5)获取机器人的基准坐标系到NDI双目相机的坐标变换关系。实验操作人员使用TMS机器人系统设定治疗计划,包括刺激靶点的位置和顺序以及每个目标的刺激时间。(6)基于本文提出的算法规划刺激线圈的行进路径和路径特征点的坐标,机器人自动引导刺激线圈依次定位设定的刺激靶点实施治疗计划。
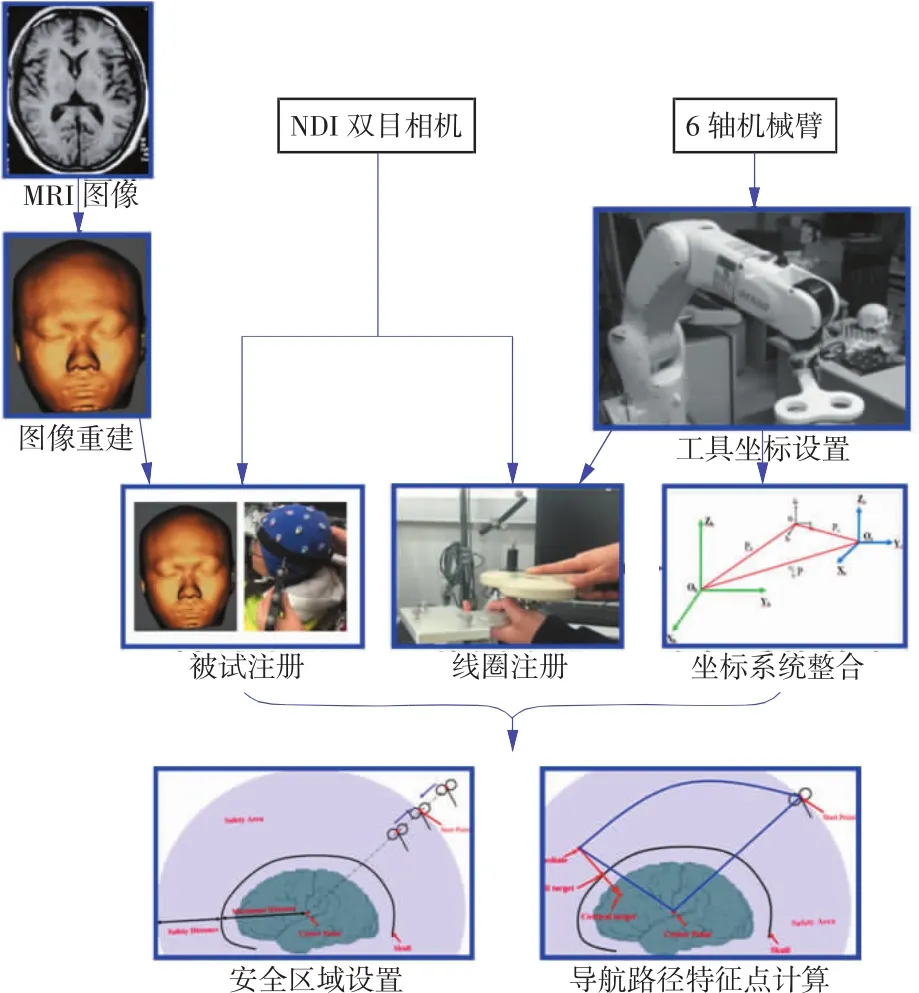
图1 机器人辅助TMS系统的工作流程
2 TMS机器人系统的组成架构
2.1 硬件方面
选用英国Magstim公司生产的经颅磁刺激仪(Rapid2,Magstim)和标准70 mm 8字形刺激线圈(P/N3191-00,Magstim)设计TMS机器人系统。同时选择最大有效载荷为4 kg的6自由度工业机器人(VS-060,Denso)以固定刺激线圈。基于双目视觉光学精准导航定位相机(Polaris Spectra,NDI)和无源近红外定位工具套件(8800837,NDI)定位被试的头部和刺激线圈。
2.2 软件方面
VS-060由专用机器人控制器(RC8,Denso)控制,使用以太网连接RC8和计算机。基于网络的开放资源接口(ORIN2)完成RC8的控制程序设计,ORIN2提供各种生产厂家的自动化设备和数据库的标准接口。使用USB2.0连接定位相机和计算机。NDI提供了一系列应用程序开发接口(application program interface,API)命令,以将相关功能集成到TMS机器人的软件系统。
2.3 医学方面
TMS治疗过程不需要灭菌。刺激磁场的强度大约在100 ms内达到1~2 T,因此产生的电场强度峰值高达600 V/m。线圈集成到机器人系统后还需要进行实验以评估电场强度对机器人系统的影响。因此,应当避免在距离线圈中心60 mm距离内出现铁磁部件。
3 TMS机器人的坐标系统
3.1 工具坐标设置
如图2(a)所示,6轴机器人VS-060的基础坐标系为三维笛卡尔坐标系,原点位于机器人“基座”中心。机器人“基座”位于机器人第一轴的底部,基础坐标系的3个坐标轴分别定义为Xb、Yb和Zb。如图2(b)所示,机器人末端的工具安装面定义为机器人法兰,原点位于法兰中心的三维笛卡尔坐标定义为机械界面坐标系(Xm,Ym,Zm)。
基于机械界面坐标系和工具坐标系的偏移和旋转量定义工具坐标系。图2(c)表示8字形线圈的工具坐标系(Xcoil,Ycoil,Zcoil)的示意图,工具坐标系与机械界面坐标的方向相同,因此旋转分量为(0°,0°,0°)。8 字形线圈通过图 2(d)所示的工件固定在机器人法兰上,因此8字形线圈工具坐标系(Xcoil,Ycoil,Zcoil)与机械界面坐标系(Xm,Ym,Zm)的偏移距离分别为a-b、0和c+h/2,其中h是线圈的厚度。
“位姿数据”代表8字形线圈的工具坐标系在机器人基础坐标系下的当前位置和姿态。一组X、Y和Z坐标表示8字形线圈中心的位置,以基础坐标表示,单位为mm。由RX、RY和RZ表示8字形线圈中心的姿态,单位为度(°)。最后,基于本节所示的工具坐标设置方法获得8字形线圈的工具坐标系在机器人基础坐标系下的“位姿数据”。
3.2 线圈校准
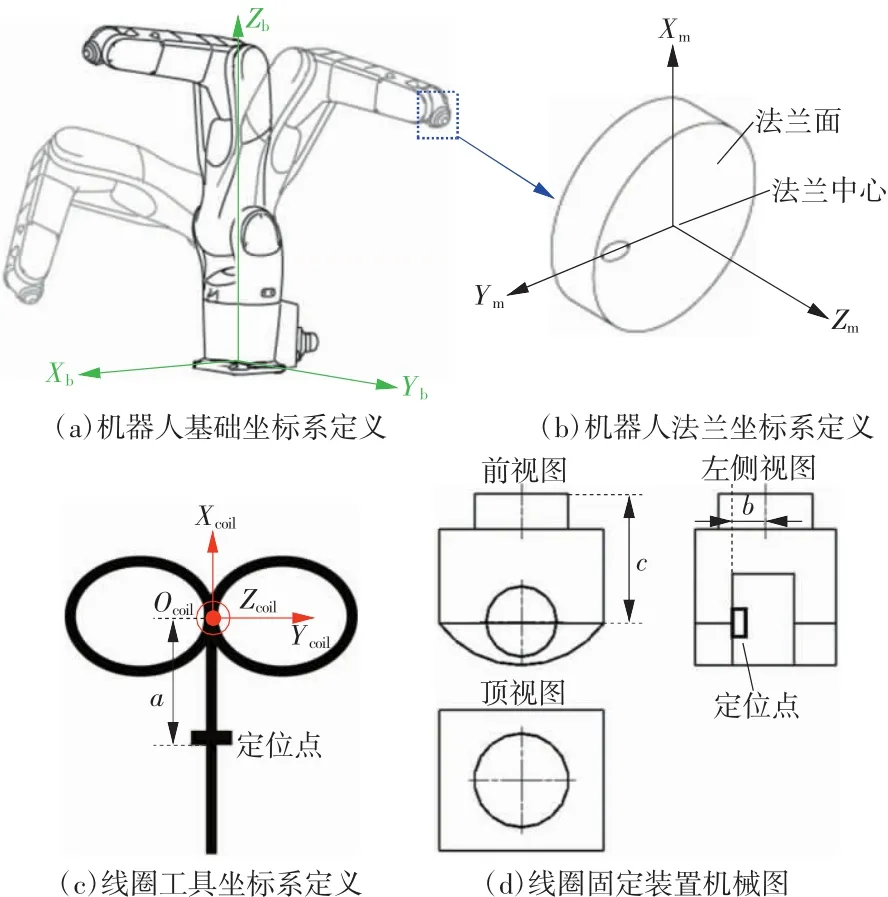
图2 工具坐标系设置
对线圈进行校准以获得刺激线圈的工具坐标系在NDI双目相机的原坐标系中的“位姿数据”。图3(a)展示了NDI双目相机的原坐标系,2个红外发光二极管阵列提供用于照射近红外反射球形标记的近红外光,2个图像传感器收集从近红外反射球形标记反射的红外光。图3(b)展示了由NDI提供的包含4个球形标记的刚体(rigid body 8700449,NDI)。通过双目相机2个图像传感器获取的球形标记位置,计算刚体在原点坐标中的“位姿数据”。如图3(c)所示,刚体固定在刚体安装装置。用于定位线圈的工具坐标系的定位探头如图3(d)所示。将探头水平放置,使定位点位于线圈的工具坐标系位置,通过双目相机可以得到线圈的工具坐标系在NDI双目相机的原坐标系中的“位姿数据”。

图3 线圈校准组件介绍
3.3 坐标系整合
图4为基于线圈校准关联机器人和NDI双目相机的坐标系[23-24]。机器人的基础坐标系定义为(Ob,Xb,Yb,Zb),NDI双目相机的原坐标系定义为(Oc,Xc,Yc,Zc),8字形线圈的工具坐标系定义为(Ocoil,Xcoil,Ycoil,Zcoil)。通过3.1和3.2节所述方法可以获取线圈工具坐标系在机器人基础坐标系和双目相机原坐标系的“位姿数据”,数据可以用齐次坐标表示,分别定义为。因此2个“位姿数据”的关系可以描述为

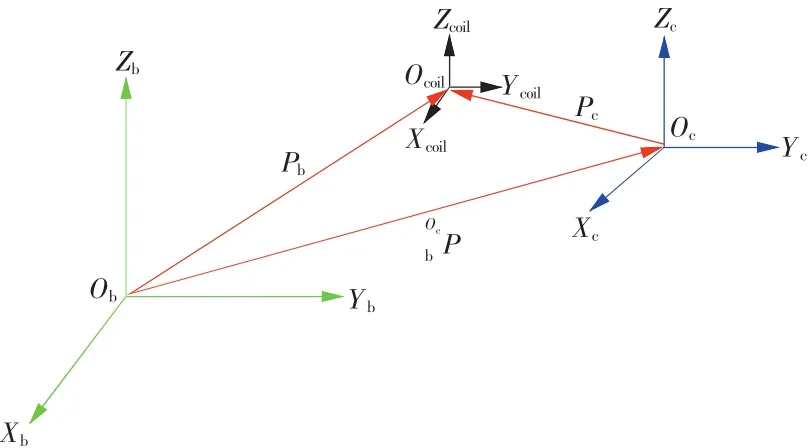
图4 坐标系整合示意图
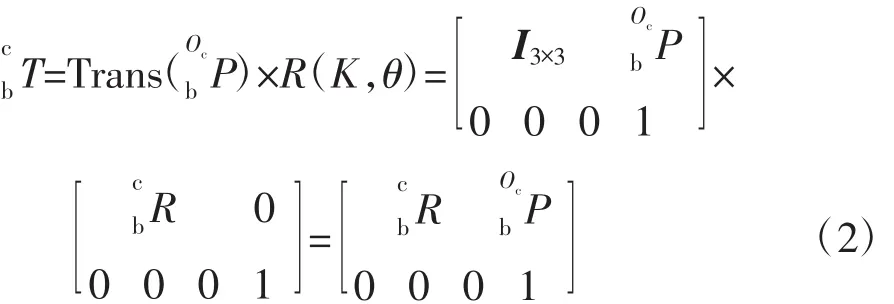
其中 I3×3为单位矩阵表示平移变换为双目相机的坐标原点Oc在机器人基础坐标系下的坐标:

R(K,θ)表示旋转变换:

根据公式(1)~(4)可以获取cbT,得到 NDI双目相机原坐标和机器人基础坐标系的齐次坐标变换,统一将双目相机观测到的刺激线圈和被试头部的“位姿数据”转换为机器人基础坐标系下的“位姿数据”,方便后续控制[25]。本文后续设计的导航路径和特征点计算方法均基于本节中整合的坐标系统。
4 导航路径规划和路径特征点的计算
4.1 安全区域设置
安全性是机器人辅助TMS系统设计面临的最重要的问题。然而,工业机器人普遍配备有用于高速运动的控制器,如果无法精细控制机器人的行进路径,可能对被试对象产生伤害。本文设计的用于TMS机器人的导航路径规划和避障算法包含2个主要步骤:(1)安全区域设置;(2)导航路径特征点计算。
图5展示了安全区域的设置方法。完成被试注册和坐标整合,系统软件可以获取机器人基础坐标系中的被试头部的位置坐标。通过公式(5)计算被试大脑的中心坐标:

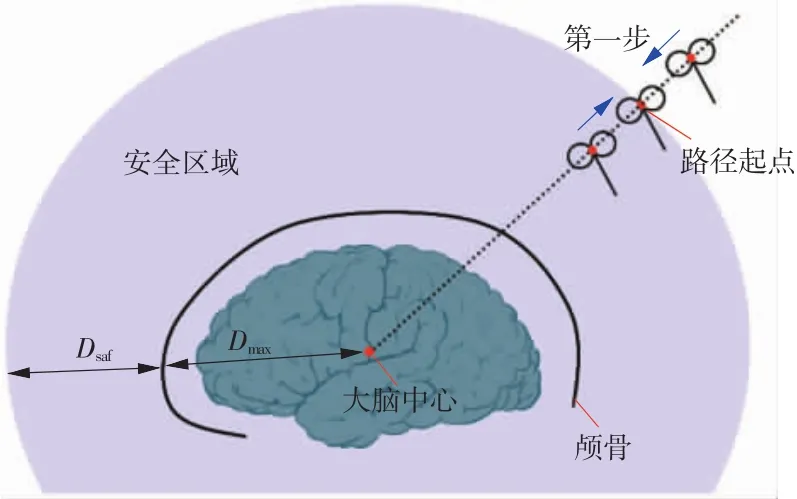
图5 安全区域设置示意图
其中,Xi、Yi、Zi定义为被试大脑在机器人基础坐标系下的空间坐标,n代表参与计算的坐标点数量。通过公式(6)计算颅骨与大脑中心点之间的最大距离Dmax:

其中,Xk、Yk、Zk定义为被试颅骨在机器人基础坐标系下的空间坐标。实验操作人员根据不同线圈设定安全距离Dsaf。对于本文使用的70 mm 8字形刺激线圈,设定Dsaf=100 mm。根据公式(7),将以大脑中心点为球心,并以Dmax+Dsaf为半径定义的球体设置为安全区域:

完成安全区域的计算后,接下来计算“路径起点”。图5展示了线圈第一步运动的路径规划和计算方法,公式(8)给出通过磁刺激线圈中心和大脑中心点的直线方程。直线和球形安全区域在被试头部上方相交于一点,将其定义为“路径起点”。程序首先沿公式(8)给出的直线方程将线圈中心移动至“路径起点”。

4.2 导航路径特征点计算
如图6所示,在实施TMS实验的过程中,通常需要实验操作人员在重建的被试大脑皮层三维模型上设置刺激靶点,此靶点定义为“皮层靶点”。“皮层靶点”在机器人基础坐标系下的空间坐标为Xct、Yct和Zct。通过公式(9)计算颅骨和“皮层靶点”之间的最小距离Dmin:

其中,Xk、Yk、Zk为被试颅骨在机器人基础坐标系下的空间坐标,定义为“颅骨靶点”。通过“颅骨靶点”和“皮层靶点”的直线方程式由公式(10)给出:

直线和球形安全区域在被试头部上方相交于一点,该点被定义为“中间节点”。控制线圈从“路径起点”移动到“中间节点”的方法如图6所示。
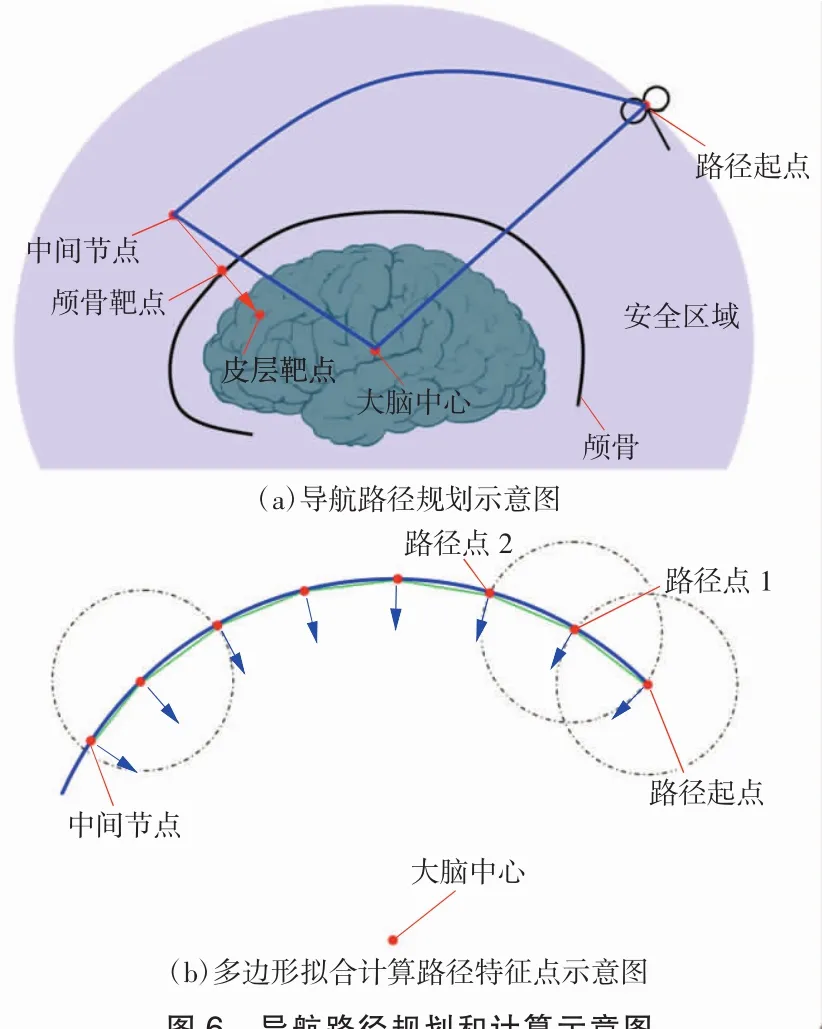
图6 导航路径规划和计算示意图
公式(11)给出了通过“中间节点”“路径起点”和“大脑中心点”的平面:
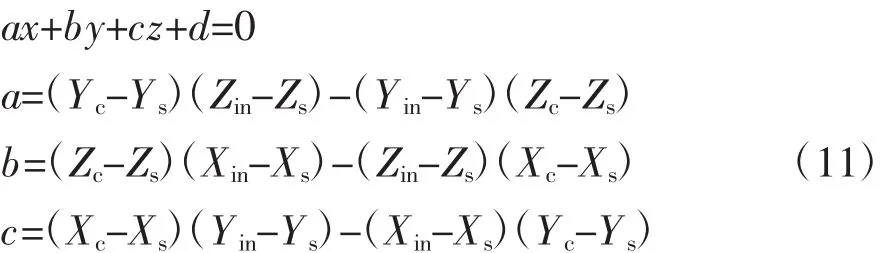

其中,Xs、Ys、Zs为“路径起点”,Xin、Yin、Zin为“中间节点”。如图6(b)所示,平面和球形安全区域以弧形相交。为了简化控制方法,线圈的所有移动都设置为直线。因此,使用多边形拟合获取弧形导航路径。首先定义以“路径起点”为中心、半径d=3 cm的球体:

弧形路径和球体相交于2个点,选择靠近“中间节点”的交点作为“路径点1”。以路径点为中心,以相同半径定义球体,以相同的方式获得第二个路径点。通过该方法逐个计算所有路径点,直到“中间节点”在球体内部。机器人引导刺激线圈沿多边形路径行进,需要指出,刺激线圈的Z轴需要始终指向大脑中心点,如图6(b)中紫色箭头所示。
线圈到达“中间节点”后,程序旋转线圈工具坐标系的Z轴指向“皮层靶点”,然后将线圈沿Z轴移动到“颅骨靶点”。
5 算法验证
如图7所示,在医用机器人的前期研究中,需要使用头部模型验证算法的可行性[18]。为了方便算法验证,本文使用跟实际线圈相同尺寸的线圈模型验证算法。将头部模型固定于光学平台,首先使用图7所示的定位探针(probe 8700340,NDI)在头部模型表面均匀选择30个点,记录位置坐标。计算30个点的坐标均值定义算法中的“大脑中心”。为简化算法验证过程,获取的大脑中心也作为“皮层靶点”参与路径计算。其次使用定位探针依次在头部模型左右半区各随机选择2个点作为“颅骨靶点”,定义为刺激靶点1、2、3、4。在头部模型周围随机选择20个位置作为线圈起始位置。然后将线圈移动至起始位置后,依次计算所有路径起点、路径点、中间节点的空间位置。最后控制机器人沿规划路径按靶点序号依次定位4个刺激靶点。观察实验过程中线圈和头部模型是否产生接触,并记录第一个靶点的定位时间和全部4个靶点的定位时间。

图7 TMS机器人系统算法验证实物图及定位探针
通过NDI提供的API命令读取定位探针指示的空间位置,使用MATLAB 2010a完成坐标系整合和路径规划的软件编程。将计算获取的路径点的位置数据导入VS-060教导机控制机器人沿规划路径行进。
设定机器人运动速度为VS-060最大速度的30%。从20个随机位置分别定位4个靶点的行进过程中未发现线圈和头部模型产生接触。第一个靶点的定位时间为(13.6±3.65)s,全部4个靶点的定位时间为(59.1±3.64)s,满足 TMS 实验需求。
6 讨论
本课题以TMS辅助机器人设计的安全性为前提,研究了控制TMS辅助机器人行进路径的避障算法设计。
在通常的TMS治疗过程中需要实验人员用手握住线圈定位刺激区域,而治疗时长可达30 min,实验人员难以保证在治疗过程中稳定地保持刺激线圈的位置。因此目前临床上普遍使用刚性支架固定TMS线圈后实施治疗[26]。虽然使用支架的方式可以使线圈在刺激期间稳定地保持其位置,但是随着患者头部的移动,刺激点随之产生偏移。最简单和最常用的方法是让患者尽可能保持头部不动,同时保持与线圈的接触。显然,像放射治疗一样,刚性头部固定会使头部运动降至最低[27]。然而刚性固定通常不能用于TMS,因为这种方法会导致患者严重不适并对患者产生压力导致患者皮层兴奋性增加。
因此,改进手持线圈的方式,使用机器人辅助TMS线圈定位的方法对于TMS的临床应用具有重要意义[28]。机器人辅助TMS系统结合了神经导航技术和自动化技术的优势,可以实现精准高效的刺激[29-30]。目前,国际上已有机器人辅助TMS系统的文献报告,例如使用力-力矩-加速度传感器(force-torqueacceleration sensor)实现的拖拽式TMS辅助机器人系统是将传感器固定于线圈和机器人法兰之间,通过反馈控制方法,实验操作者可以拖动机器人定位线圈至刺激靶点[31]。也有对TMS辅助机器人的系统校准和系统测试的相关报告[17-18,32]。
实现更加安全的、自动化的TMS辅助机器人控制是本文研究的重点内容。但是如何安全地实现刺激靶点的自动定位和切换目前还未见文献报道。首先本文应用机器人避障技术,基于刺激线圈的形状特点,设计了TMS辅助机器人导航路径规划与避障算法。之后搭建了TMS导航机器人算法验证系统。靶点定位实验的结果证明本文设计的方法可以安全有效地实现刺激靶点的定位和切换。但是本算法获取的定位时间约为13.6 s,手持线圈定位刺激靶点通常也可以控制在10 s左右,因此TMS辅助机器人无法缩短靶点定位时间。在实验过程中本文设定机器人运动速度为VS-060最大速度的30%。设定更快的机器人运动速度可以缩短靶点定位时间,但过快的机器人运动速度对系统的安全性提出了更高的要求。
目前本文设计的TMS辅助机器人系统并不包含力反馈控制模块,因此考虑前期测试的安全因素,并未使用被试对象参与算法验证。而且本文算法测试使用的头部模型的边缘为圆弧形,但是实际人的头部边缘并不规则,有可能影响路径末端的计算结果。所以在未来的研究中需要在TMS辅助机器人系统中加入力反馈控制模块,实时监控线圈和被试头部的接触力。完成系统整合之后还需要使用真实被试对象进行更加系统的测试和优化。
7 结论
TMS在研究和治疗一些精神疾病表现出了巨大的潜力。引入机器人技术可以解决手持线圈方法存在的精确性和复杂性问题。本文展示了一种用于TMS的机器人导航路径规划与避障算法。从测试结果中可以看出,本文提出的方法可以安全有效地引导机器人实现刺激靶点的定位和切换,为后续实现TMS辅助机器人系统的自动控制奠定基础。
猜你喜欢
大电机技术(2022年4期)2022-08-30
中老年保健(2021年3期)2021-12-03
军事文摘(2020年22期)2021-01-04
中国生殖健康(2020年7期)2020-12-10
装备制造技术(2020年12期)2020-05-22
模具制造(2019年7期)2019-09-25
天津医科大学学报(2015年2期)2015-12-22
医学研究杂志(2015年7期)2015-06-22
汽车维护与修理(2015年6期)2015-02-28
同位素(2014年2期)2014-04-16