基于Fuzzy-PID的磁悬浮列车速度控制系统
2019-06-27 01:48张梦乡陈建政
科技创新与应用 2019年8期
关键词:磁悬浮列车
张梦乡 陈建政
摘 要:磁浮列车运行控制是一个复杂的非线性控制系统,基于传统PID算法的速度控制器不能消除时变干扰影响,动态性能差。文章提出基于Fuzzy-PID控制的磁悬浮列车速度闭环跟踪控制算法,利用模糊逻辑在线计算PID参数修正量。数据仿真试验结果表明,Fuzzy-PID控制可以明显改善速度闭环控制器的响应特性,提高列车运行控制系统的动态性能。
关键词:磁悬浮列车;Fuzzy-PID算法;运行控制
中图分类号:U237 文献标志码:A 文章编号:2095-2945(2019)08-0014-03
Abstract: Maglev train operation control is a complex nonlinear control system. the speed controller based on traditional PID algorithm cannot eliminate the influence of time-varying interference and has poor dynamic performance. In this paper, a closed-loop tracking control algorithm for maglev train speed based on Fuzzy-PID control is proposed, and the PID parameter correction is calculated online by fuzzy logic. The results of data simulation test show that Fuzzy-PID control can obviously improve the response characteristics of the speed closed-loop controller and improve the dynamic performance of the train operation control system.
Keywords: maglev train; Fuzzy-PID algorithm; operation control
引言
磁浮列車安全性高、选线灵活、乘坐舒适性好、无污染、占地少,是解决大中城市交通问题的有效方法[1][2]。其安全高效运行依赖于控制系统在安全速度域内精确、无时延的计算并跟踪理想速度运行,因此,设计一个跟踪性能良好的速度闭环控制器是磁浮列车运行控制的关键[3][4]。
由于磁悬浮交通系统具有轨道不平顺、空气阻力、电磁涡流阻力、悬浮气隙动态变化等特点,一般很难建立准确的列车运行动态模型[4-6]。传统PID控制设计速度闭环控制器控制规律过于简单,无法适应各阶段系统模型变化。Fuzzy-PID控制把专家的经验表示成模糊语言描述的控制规则,在被控对象控制模型存在误差的情况下,通过在线调整参数就能达到良好的控制效果,对复杂、建模困难的系统均能有效控制,非常适用于具有时变干扰和非线性的磁浮列车运控系统[7][8]。
本文以某建设中试验线为工程背景,设计了基于Fuzzy-PID控制的速度闭环控制器,跟踪理想速度曲线运行,改善运行控制系统动态性能。
1 磁浮列车运控模型
磁浮列车在运行过程中沿轨道方向的合力F可表达为电磁牵引力Fq、电磁涡流阻力Fb、空气阻力Fa和坡道阻力Fi的合力[4],如式(1)和式(2)所示。
其中,n为列车编组个数,M为列车质量,ψd、ψq和id、iq 分别为定子绕组的磁链分量和电流分量,Pl为空气密度, Cx为空气阻尼系数,Sf为列车前端面积,I(s)为坡度的分段千分度函数。
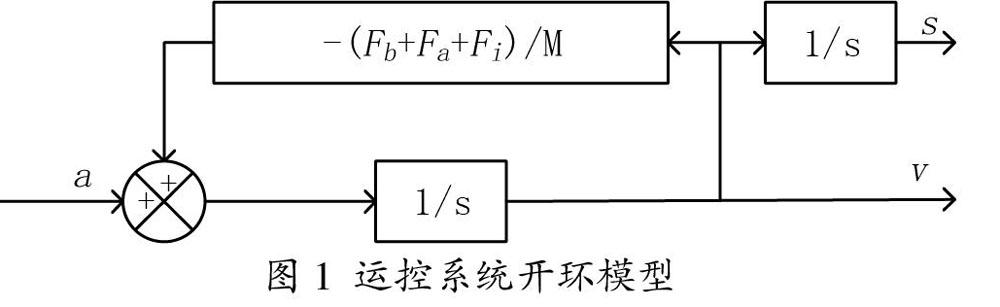
由于列车速度v、加速度a、位置s满足基本运动学方程a=dv/dt,v=ds/dt。根据F=Ma和式(1)可得磁浮列车运控系统的非线性开环传递模型,如图1所示。
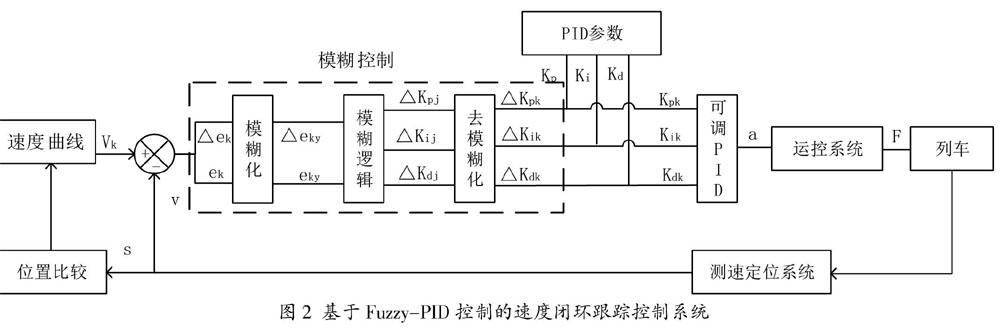
基于Fuzzy-PID控制的速度控制系统如图2所示,模糊控制器通过在线调整PID比例系数KP、微分系数Kd和积分系数Ki的修正量ΔKP、ΔKd、ΔKi,使得该系统具有适应时变性和非线性的优点,并提高了系统的动态响应性能。
2 基于Fuzzy-PID控制的速度闭环控制器
模糊控制器主要由输入模糊化部分、模糊逻辑部分、输出去模糊化三部分构成[7]。输入为量化后的速度偏差和偏差变化率,输出为三个PID修正量。
2.1 输入模糊化
将k时刻的输入偏差ek和偏差变化率Δek线性变换到模糊控制器论域范围[-3,3],实际的输入范围为[ymin,ymax],变换公式表示为:
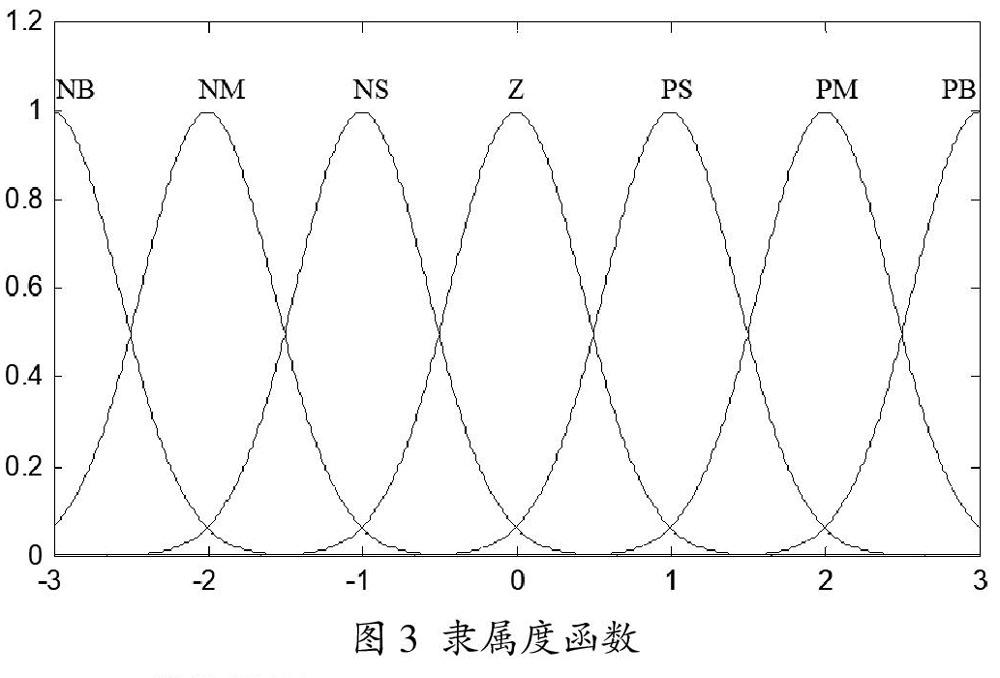
用一组模糊语言名称{NB,NM,NS,ZO,PS,PM,PB}来衡量输入的大小,分别表示{负的较大值,负的中等值,负的较小值,零,正的较小值,正的中等值,正的较大值}。
每一个模糊语言为一个模糊集合,取高斯函数f(x)为隶属度函数[8],如图3所示。对于任何一个输入的精确值,均可以计算其隶属于每个模糊集合的概率,进而将精确值作模糊处理,确定输入偏差ek和偏差变化率Δek所属的模糊集合。
2.2 模糊规则
PID各参数对系统影响各不相同,比例系数KP、微分系数Kd和积分系数Ki分别调整控制系统动态响应指标中的响应速度、动态特性和稳态误差。由于每个输入均有7个所属模糊集合,故双输入模糊控制器需设定49条模糊控制规则,其对PID参数整定的基本原则是:当偏差较大,应取较大的KP,以达到迅速调整误差的效果;当偏差中等时,选取较小的KP和适当的Ki、Kd,避免系统超调量过大;当偏差较小时,选用较大的KP和Ki,提高系统稳态性能。
2.3 输出去模糊化
由式(2)可知磁悬浮列车所受电磁涡流阻力和空气阻力大小与运行速度相关,速度越高,所受阻力越大,模型失配越严重。从跟踪效果可以看出,列车低速运行时,PID控制和Fuzzy-PID控制都能较好适应系统模型变化,且Fuzzy-PID控制的響应更快、超调更小;列车高速运行时,传统PID控制已经无法适应系统模型变化,超调量和调整时间远远大于Fuzzy-PID控制。可以看出Fuzzy-PID控制效果良好,能够适应磁浮运控系统需求,改善系统动态性能。
4 结论
本文基于Fuzzy-PID控制的磁悬浮列车速度跟踪控制系统,可以实现不同速度等级下的高精度跟踪控制。解决了在系统复杂非线性条件下,动态最优控制由于模型不准确而引起的速度跟踪系统动态性能低的问题。本文的研究实用性强,算法实现简单,具有很高的潜在市场价值。
参考文献:
[1]Ono M, Koga S, Ohtsuki H. Japan's superconducting Maglev train[J]. IEEE Instrumentation & Measurement Magazine, 2002, 5(1):9-15.
[2]Sawada K. Outlook of the Superconducting Maglev[J]. Proceedings of the IEEE, 2009,97(11;11):1881-1885.
[3]吴玉生.磁浮列车自动驾驶(ATO)系统控制算法研究与仿真[D].国防科学技术大学,2005.
[4]杨光.高速磁浮列车最优速度曲线及其跟踪控制研究[D].北京交通大学,2007
[5]李达.磁浮列车运行速度曲线优化设计和特殊路况下的紧急制动性能研究[D].浙江大学,2005.
[6]曾欣欣.S1线中低速磁浮列车最大牵引力控制方式研究[J].铁道学报,2017,39(06):55-58.
[7]季辉,李志坚,陈小刚.基于Fuzzy-PID控制的雷达伺服系统研究[J].电子测量技术,2017,40(12):29-32.
[8]琚垚,郑伟.浅谈隶属函数对模糊控制系统控制性能的影响[J].科技创新与应用,2013(04):53.
猜你喜欢
科学大众·小诺贝尔(2021年5期)2021-01-21
知识就是力量(2020年9期)2020-09-03
科学与财富(2018年10期)2018-06-09
科学与财富(2017年19期)2017-07-19
科学大众(中学)(2017年2期)2017-03-21
快乐作文·高年级(2014年12期)2015-01-05
小朋友·快乐手工(2009年4期)2009-04-28
初中生学习·高(2006年1期)2006-06-02