浅谈船舶液位遥测系统的维修
2019-07-05 09:55张伟
船舶 2019年3期
张 伟
(上海海迅机电工程有限公司 上海200011)
引 言
我国海洋事业逐渐走向深蓝,这对船舶的性能提出了更高的要求。液位测量原先一直采用人工标尺测量法,这种测量方法原始,费时费工且测量效率低,船员不能在短时间内获得液舱装载信息,在加油、加水时,易发生舱满外溢。近年,随着船舶总体技术水平的提高,液位遥测系统应需而生。液位遥测替代人工测量可大幅减轻船员的体力劳动,提高测量效率;而且它具有显示直观、操作简便、可设置液位报警信息等优点。
此外,随着船龄增加,船上设备必然会出现材料老化的现象,导致设备的技术性能下降,液位遥测系统随船龄增加系统测量精度下降更明显。因此,液位遥测系统在使用过程中,为保持良好的技术状态,需定期对系统的设备进行相应的维护和修理。
1 液位遥测系统
1.1 工作原理
液位遥测系统是基于PLC技术的系统,系统主要由数据采集单元、数据分析/处理单元、数据显示单元等模块组成。系统的工作方式是传感器负责采集各舱液位信息,将采集的数据转换成电信号并输出至控制箱,控制箱内的PLC/CPU对数据进行分析和处理,处理后的数据以图表和文字等方式将液位高度显示出来。
系统的人机界面可对液位信息进行相关检测和设置,包括通讯检测、故障检测、参数设置等。通过上位机船员可设置液舱相关的报警信息,人机界面显示报警通道名称,报警内容等,保证船始终处于安全状态。
1.2 船舶常用液位测量装置
液位测量装置种类繁多,船舶上常用的液位测量装置有:吹泡式测量、静压式测量、雷达式测量、磁翻柱式测量等,这几种测量装置都有各自的优缺点:
(1)吹泡式测量是在液舱中插入一根气管,气体经过滤和减压后,洁净的气体再经过恒流器和气管吹入液舱。吹气流量由恒流器控制,气体经过恒流器沿气管吹入液舱中,压力传感器测量气管进液舱管路上的压力,当气管末端有连续微量气泡排出时,此时传感器测量的压力等于当前液位高度产生的压力。吹泡式测量的气管路布置较复杂且测量精度不高,往液舱吹气还可能会污染测量介质;因压力传感器不与测量介质直接接触,传感器使用寿命长,适应于测量精度要求不高、恶劣环境的液舱。
(2)静压式测量是靠水压作用在传感器端面的膜片上,膜片产生微小形变引起传感器内部微电路发生变化,传感器输出一个与压力大小成正比的电信号。静压式测量装置结构简单,传感器体积小,测量精度高;但传感器与介质直接接触,长期使用可能会损坏传感器膜片。
(3)雷达式测量是通过雷达传感器[1]的天线系统朝介质的方向发射能量很低且极短的微波脉冲,微波被介质表面反射并被天线系统重新接收,微波脉冲以光速运行,从发射到接收,雷达脉冲所需的运行时间和舱内液高成函数关系。雷达传感器测量精度高,信号抗干扰能力强,因雷达传感器不与测量介质接触,不污染介质且使用寿命较长;导波雷达传感器安装前需增加导波管,防止测量过程中微波遇到干扰物,干扰物作为虚假反射信号源影响测量结果,雷达传感器成本较高,建议使用在测量精度要求较高的油舱。
(4)磁翻柱式测量是基于连通器原理并结合浮力原理和磁性耦合作用原理研发而成测量装置。当被测液舱中的液位升降时,液位计主导管中的浮子也随之升降,浮子内的永久磁钢通过磁耦合传递到现场指示器,驱动红、白翻柱翻转180°。当液位上升时,翻柱由白色转为红色;当液位下降时,翻柱由红色转为白色。现场指示器的红、白界位处为液舱内介质液位的实际高度,同时通过液位变送器将液位信号转换成标准电信号输出至控制箱。磁翻柱液位计测量结果可靠,类似于标尺测量,使用寿命极长;但需提供足够安装空间,不适合测量大深型的液舱。
2 维修流程
船舶设备维修级别分为:自修、航修、厂修、报废四个级别[2],本文主要是对厂修级别的维修进行探讨。当船员遇到无法自行解决的故障问题,船长向相关单位提交修理申请并获得批准后,相关单位根据维修的范围和内容确定维修的等级。厂修之前,船长组织各单位各部门召开修理工程会议,根据船舶设备的技术状态编制合理的修理单,修理单是船舶修理工程的基础技术文件,是船厂安排修船计划的依据。对于无法拆检的部件,不能确定修理内容,应写明待拆检后再确定修理内容。
船舶进入修理厂之前,需将船上易燃易爆物品卸至指定地点,按照修理工程对油舱、压载水舱及管路等进行清洁,清除舱底杂质,对于需要动火场所,须排除易燃易爆气体。
船厂根据接收的修理委托单进行相关的修理,组织外协厂家进行勘验,并确定修理方案和修理工期。在修理过程中,船厂应派专业的监修师进行监修,实时了解维修进度,最终确保维修工作按时按质完成。
3 案例分析
厂修一般分为普通维修和改装维修。普通维修不改变系统的技术参数,牵联工程较小,可操作性强。维修人员需查找出设备故障的位置,要求制造商及时提供相应损坏的部件,更换设备后还需进行相关试验,以验证设备完好。改装维修是为了改善船舶原性能而进行的修理。其涉及管路铺设、电缆敷设、焊接等,牵联工程较大,施工周期较长。
现以某综合补给船液位测量改装性维修工程为例进行分析。
3.1 勘验情况
该船原液位遥测系统采用吹泡式测量15个压载水舱、4个淡水舱的液位高度和4点吃水深度,采用雷达式测量16个油水舱的液位高度,总共测量35个液舱的液位和4点吃水深度。
维修前经勘验该船液位遥测系统存在如下问题:液舱测量数据普遍无法显示,即使少数液舱有数据显示,但测量结果与实际液位高度相差悬殊;系统的机械部件都存在不同程度的锈蚀;液货控制室的触摸显示屏触摸无反应。
本船装载吨位较大,若液位遥测无法正常使用,测量工作全靠人工执行,会造成大量的人力物力资源浪费,且人工测量速度慢,无法实时了解液舱的装载信息,不利于船舶的自动化、智能化。
3.2 故障分析
吹泡式测量失真后,水舱加水一般加满为止,以液舱透气管溢出水视为加满。吹气管路上无保护装置,满舱后水可能沿气管路进入控制箱,导致控制箱内测量部件锈蚀、损坏;电气控制模块和传感器型号老旧,模块处理数据处理能力下降。
本船油水舱内部结构复杂,微波扫描范围内有管道、扶梯等干扰物,而雷达传感器安装处下方未设置导波管。传感器在使用过程中,微波遇到舱内干扰物时,误将干扰物作为反射源,导致雷达传感器接收到虚假反射信号,将干扰物的虚假信号当作液面反射信号。
触摸显示屏触摸无反应,屏内部电子部件老化;屏内装载程序版本过旧,操作流程繁琐。
3.3 维修方案
压载水舱环境恶劣,测量精度要求不高,故测量方式维持吹泡式测量,但需更换控制箱内部的电气元器件和锈蚀的机械部件,更换后确保控制箱内的管路气密性良好。另外,吹气紫铜管上加装单向控制阀,可阻止水倒灌入控制箱,有效保护控制箱内的测量部件。
淡水舱原测量方式为吹泡式测量,压缩空气易将杂质带入淡水舱,可能造成淡水污染,吹泡式测量操作不便且测量精度低。根据现场勘查的情况将吹泡式测量改为静压式测量,在原吹泡式装置的安装法兰增设防水接头,将静压传感器投入淡水舱舱底并固定,传感器电缆通过防水接头导出进入控制箱。吃水测量在原海水引入桶桶盖上引一管路,在管路上安装静压式传感器,最后将传感器信号导入控制箱内。
雷达传感器安装处下方内增加雷达导波管[3],以约束雷达波的传播路径。导波管内壁要求光滑无毛刺,管底部安装反射板,反射板可将穿透液面的雷达波反射到导波管外。导波管在安装焊接过程中需保持管内壁光滑,最后用U型抱箍将导波管固定,防止导波管随船摇晃。
为更便捷地操作液位遥测系统,更直观地显示各液舱的液位信息,按原触摸屏的接口尺寸更换新触摸屏,并升级液位测量的软件程序、优化程序结构,合理布置液舱画面。
3.4 维修后系统性能
该船液位测量修理从勘验到修理结束共耗时8个月。修理后系统采用吹泡式测量15个压载水舱的液位高度,采用雷达传感器测量16个油水舱的液位高度,用静压式传感器测量 4个淡水舱的液位高度和4点吃水深度。修理后系统的设备更先进、显示屏显示画面布置更合理,系统的操作响应更迅速,船员在液货控制室可对全船液舱液位和吃水深度进行监测。
液位遥测精度高,连续多次试验后,所有液舱的精度都在允许范围内;系统操作简单,画面显示模拟液舱的舱名、介质高度、吨位信息等,用户可通过触屏一体机显示各液舱液位信息,用手指轻触就能快速了解各舱液位高度(如图1所示)。
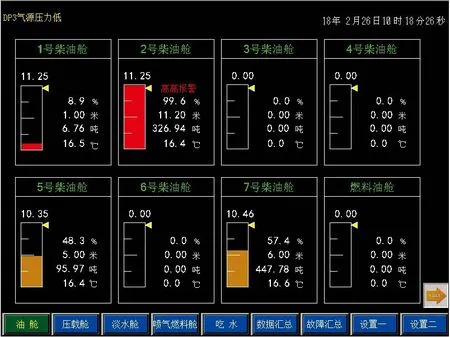
图1 液位遥测系统效果图
4 结 语
船舶修理级别确定后,制定修理方案时需充分考虑修理费用高和设备性能完好性差的两大难题[4]:一是要解决原来设备故障问题,经修理后设备恢复原技术状态;二是保持技术状态可行的前提下,选择合理的方法降低维修费用。
相比日、韩、欧、美等发达国家,我国在船舶修理这方面起步晚且基础薄弱,与当今世界先进水平仍存在不少差距,但我们会积极学习国外先进的工作经验,并结合自身基础条件,在船舶设备修理级别和分析、修理方案等方面进行一些探讨,希望对船舶修理工程有积极作用。
猜你喜欢
军民两用技术与产品(2022年5期)2022-06-28
计算机测量与控制(2021年9期)2021-10-08
探测与控制学报(2020年5期)2020-11-05
弹箭与制导学报(2020年2期)2020-09-01
科技视界(2020年17期)2020-07-30
计算机测量与控制(2020年3期)2020-04-07
小学生学习指导(低年级)(2018年12期)2018-12-29
汽车实用技术(2018年17期)2018-10-21
小学生导刊(高年级)(2016年11期)2016-11-14
科技与创新(2015年2期)2015-02-11