三维激光扫描技术在城市建筑物高精度建模中的应用
2019-07-05 09:41李强
城市勘测 2019年3期
李强
(沈阳市勘察测绘研究院,辽宁 沈阳 110004)
1 引 言
三维激光扫描技术被称为“实景复制技术”,其能快速获得原始的测绘数据,并完整、高精度地重建实体[1]。与激光测距技术点对点的测量方法不同,地面三维激光扫描技术使传统的人工单点数据获取变为连续自动获取批量数据,提高了量测的精度与速度[2]。地面三维激光扫描将传统的点测量发展为面测量,可以高效率、高质量、低成本地获取海量的空间数据,充分体现测量目标的特征信息。采集到的数据经过处理,可以直接为CAD等软件使用构建高精度模型框架,还可以将真实的纹理映射到模型框架上,生成三维模型。
本文以沈阳K11购物艺术中心为实例,采用Leica Scan Station P40三维激光扫描仪对其进行了扫描测量,利用全站仪测量对扫描精度进行了评定,并以此为基础构建了高精度三维模型,取得了较好的效果。
2 工程概况和作业流程
2.1 工程概况
本文的测量对象为沈阳K11购物艺术中心,位于青年大街浑河北岸,其建筑面积约26万平方米。整个综合体项目集合K11购物艺术中心、沈阳新世界博览馆、五星级酒店、写字楼、服务式公寓等业态于一体,是沈阳市最大的单体建筑。整个综合体外形设计现代时尚,正面博览馆设计具有倾斜线条美,整体向外倾斜,由多个方块结构错乱有序地叠置在一起,顶部形如“大鹏展翅”,如图1所示。这些对于传统的测量方式都是极大的挑战。

图1 沈阳K11购物艺术中心效果图
2.2 作业流程
三维激光扫描技术应用于建筑物三维建模的作业流程主要可分为三大部分:外业数据采集、内业数据处理和实体建模,其流程图如图2所示。
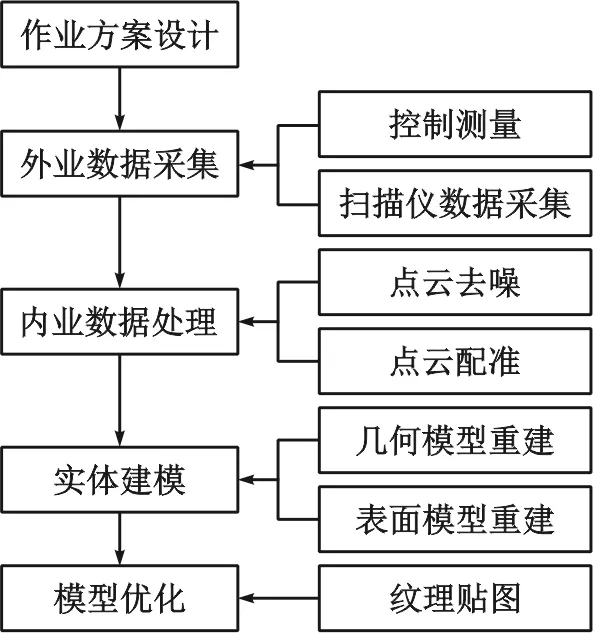
图2 作业流程图
3 外业数据采集
3.1 扫描方案设计
此次扫描采用的是Leica Scan Station P40三维激光扫描系统,其主要性能优势有以下三点:
(1)扫描速度快,精度高,扫描范围广。扫描速率最高可以达到 1 000 000点/秒,点密度最高可以达到 2 mm/10 m,其最远射程可达 270 m,点位精度可以达到毫米级别。
(2)集成了高分辨率相机。扫描仪机身集成了自动调焦的数码相机,在进行激光扫描的同时获取扫描场景的高清照片,可用作三维模型数据的纹理贴图。
(3)配备了专业的点云后处理软件。利用专业的点云后处理软件,可以更加方便和高效地处理海量点云数据,提取高精度的特征点、线、面,制作三维模型。
方案制定应考虑三个方面问题:①站点布设。测站布设应考虑扫描数据的完整性,保证测站间的通视,测站与测站之间不小于20%的重叠度。②设置扫描分辨率。根据不同的扫描距离设置不同的扫描分辨率。③标靶布设。各测站重叠区域应布设了不少于3个的公共标靶,并尽量避免位于同一条直线上。最终确定在K11周围布设26个测站,其中在K11周围布设了20个测站,K11顶部布设了6个测站。
3.2 控制测量
为了更精确地获得建筑物的三维坐标,以便将三维模型成果纳入沈阳市平面坐标系统和高程系统中,我们在建筑物周围布设了8个控制点。控制点采用的是网络RTK现场布设的方式,利用了“沈阳市连续运行卫星定位城市测量综合服务系统(SYCORS)”和沈阳市似大地水准面,RTK定位精度可以达到 2 cm左右。
3.3 扫描仪数据采集
根据制定好的扫描方案完成对建筑物的三维激光扫描,同时利用扫描仪集成的相机获取扫描场景的高清照片。为保证点云配准精度,在场景扫描完成后,对公共标靶以及测量控制点进行扫描,以便后期点云配准。
4 内业数据处理
4.1 点云数据去噪
外业数据采集完成后,需要去除点云数据中的噪声点,其结果直接影响后期建模的质量。点云数据中的噪声来源主要有两种:一是外界因素干扰,譬如目标前方遮挡物、扫描有效范围外的地物点;二是激光多路径干扰,由于激光光束的离散度,使得一个发射光束可接收到不同实体返回的反射光束而产生噪声以及激光穿透透明物体造成的噪声点。
因不同实体反射而产生的噪声点可在点云后处理软件中利用滤波方法处理,其原理是通过在指点区域内采用赋有权重的高斯分布,可以在保留原有点云数据特征的前提之下有效地过滤掉指定区域内的高频信息,去除噪点;因遮挡物和激光穿透造成的噪声点,可在Leica Cyclone中通过人工交互的方式批量去除,仅保留扫描目标表面的点云数据。
4.2 点云数据配准
点云数据配准就是将基于各个测站的扫描点云数据合并为一个完整统一坐标系下的点云[8],其方法主要有三种:基于标靶的配准,基于多视点云的配准和基于控制点的配准。
基于标靶的配准方法通过精确识别同名标靶完成配准,配准精度较高,处理流程为自动化;基于多视点云的配准方法是基于具有一定重叠区域的点云,通过人工交互指定同名点完成配准,一般作为不宜布设标靶情况下的补充手段;基于控制点的配准方法是通过识别已知坐标信息的控制点,将点云数据统一到特定的坐标系统中,配准的精度取决于控制点识别的精度以及控制点测量精度。
本次的点云配准主要是通过基于标靶的方式分别完成地面布设的20站和K11顶部6站的点云配准,之后这两大部分的点云数据采用的是基于多视点云的配准方式合并成一个整体,最后利用基于控制点的配准方式将点云数据纳入沈阳市平面坐标系统和高程系统中,拼接后的点云数据如图3所示。
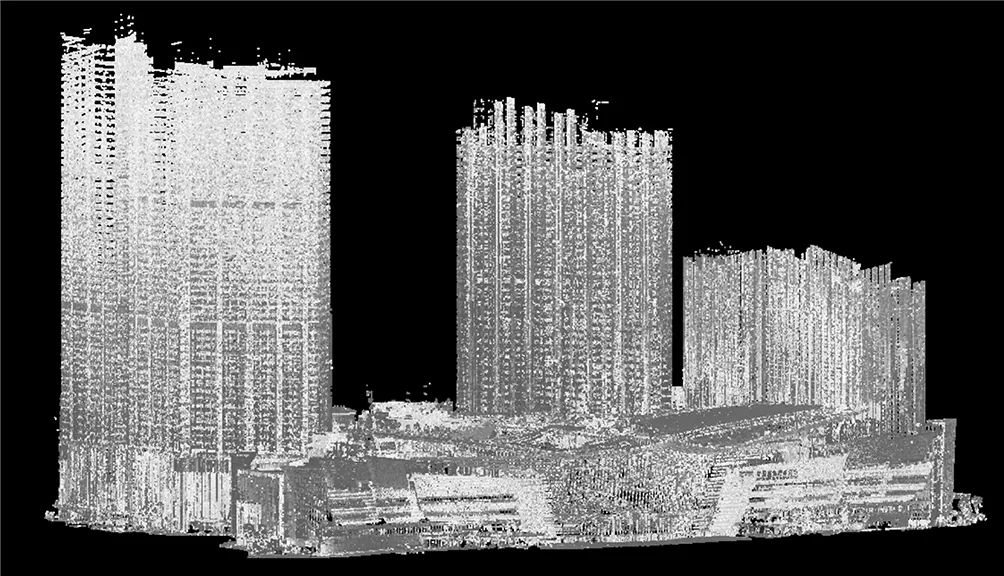
图3 拼接后的点云数据
4.3 点云数据精度分析
(1)测量精度分析
点云数据的点位精度误差来源主要包括:仪器测量误差和点云配准误差。
三维激光扫描仪的仪器测量误差主要包括测角误差和测距误差,这两方面误差对点云点位精度的影响为[8]
(1)
式(1)中md为仪器测距误差,mβ为仪器测角中误差,D为测站点和目标指点的距离。Leica P40的测距误差为 1.2 mm+10 ppm,测角误差为8″,扫描目标与仪器距离大约为 50 m,则可计算得到仪器测量误差为m1=3 mm。
本次点云配准中误差m2=5 mm,根据误差传播定律,点云数据的误差理论值为:
(2)
根据式(2),可得点云理论上点位中误差为m=5.8 mm。
(2)测量结果对比分析
本次检核在点云模型上选取并量测了扫描对象10条特征边长,然后和全站仪观测数据进行了对比分析,测得的数据如表1所示。其中边长较差最大值为 3.3 cm,中误差为 1.3 cm,相对误差在1‰以下。测量精度满足《城市测量规范》(CJJ/T 8-2011)中1∶500 DLG成图标准。

扫描仪与全站仪边长测量数据对比 表1
5 实体建模
一般来讲,利用点云数据进行三维模型重建主要有两种方法:一种是几何模型重建,也就是建立轮廓模型;另一种是表面模型重建,主要是构造不规则三角网来表示物体表面。
前者是在点云模型上面提取建筑物的特征线,生成CAD模型框架,适用于较规则的建筑物实体建模;后者构网方法简单,适用于对不规则连续曲面的模拟,但是数据量较大,处理相对复杂。本次建模对K11的主体结构采用第一种方法,对其翼型屋顶及其他不规则曲面的艺术造型部分采用第二种方法。
5.1 几何模型重建
较规则的建筑物其形状一般可以由特征线来定义,特征线一般包括建筑物的边界线、轮廓线、屋脊线等等,特征线提取的过程即是通过三维点云复原其建筑结构图的过程。
特征线的提取主要有三种方式:①特征点拟合法,即在三维点云模型中选取若干特征点,通过特征点拟合获得特征线,该方法适用于提取曲线形状的特征线;②切片法,通过定义切平面,提取某一高度区间的点云,这些点云形如一连串密集碎部点,根据一定的取舍原则连接起来即是建筑物的特征线,该方法适用于分层绘制建筑物的特征线;③投影法,通过定义不同的投影面,将三维点云模型投影到二维平面,绘制特征线,该方法适用于建筑物立面图的绘制。
利用Leica Cyclone软件,综合运用上述三种特征线提取方法,根据特征线完成几何模型的重建,结果如图4所示。
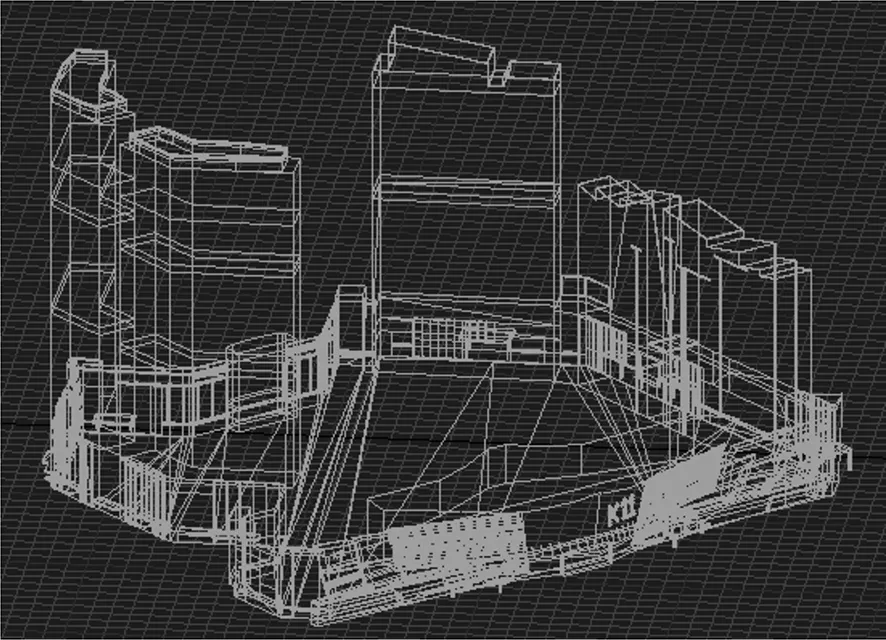
图4 几何模型重建成果图
5.2 表面模型重建
(1)构建不规则三角网
在Leica Cyclone软件中将目标点云孤立出来,构建不规则三角网,模拟对象表面形态特征。构网比较常用的是Delaunay三角网,可以有效地避免狭长三角形的出现,提高表面重建的精度。
(2)三角网模型化简
由于扫描点云比较密集,构建不规则三角网难免产生数据冗余,譬如一个平面两个三角网即可表达,但实际生成的三角网个数会有很多,造成数据冗余。为此需要在保证精度的前提下对三角网模型进行适当的化简,在曲率较大的地方保留足够多的数据点,在曲率小的区域保留较少的数据点,而不是简单地均匀抽稀,以减小数据冗余。
(3)三角网模型优化
由于目标的复杂结构以及扫描距离、范围的限制,最终扫描结果可能会有部分数据不是很完整,在构建三角网时会造成表面空洞。这就需要根据建筑物的表面特征来进行数据补充,形成比较完整的三角网模型,譬如对于屋顶的屋脊线以及边缘轮廓线进行重点增强处理。通过三维表面模型重建的“翼型屋顶”如图5所示。
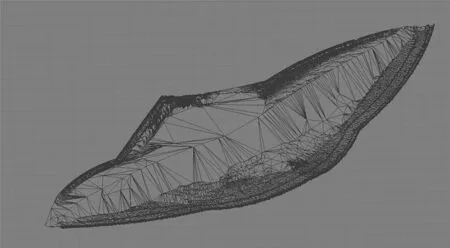
图5 三维表面模型重建效果图
5.3 模型优化
为了增加模型的逼真性和现实性,可以在三维模型上增加纹理使其成为具有纹理属性的三维模型。利用扫描仪拍摄的高清相片可以制作纹理贴图,再通过3ds Max进行纹理贴图和三维渲染,使建筑物模型更具有美感,模型更加逼真。制作好的三维模型如图6所示。
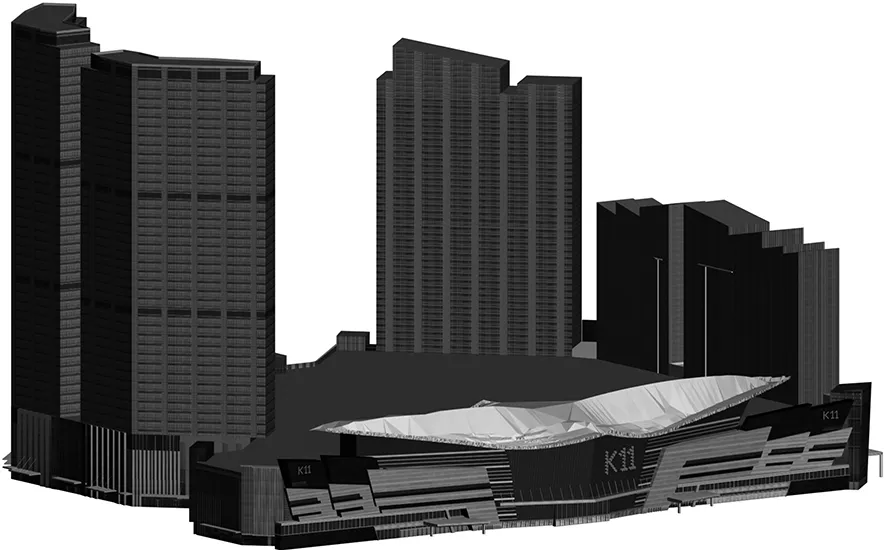
图6 K11三维模型
6 结 语
地面三维激光扫描测量仪使得传统的单点采集数据的测量方式变为密集、连续地自动获取数据的测量方式,获取的信息量也从点的空间位置信息扩展到目标的纹理和颜色灰度信息。本文以沈阳K11艺术购物中心为例,验证了利用三维激光扫描技术制作高精度三维模型的有效性和可行性。利用三维激光扫描技术进行复杂建筑物的高精度三维建模将是未来发展的一个方向,如何快速、自动地提取特征线,完成纹理映射,提高建模效率则是需要研究的地方。
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21
全球定位系统(2021年1期)2021-03-26
黑龙江水利科技(2020年8期)2021-01-21
软件导刊(2020年11期)2020-01-05
小学生学习指导(低年级)(2019年9期)2019-09-25
北京航空航天大学学报(2017年4期)2017-11-23
智能计算机与应用(2017年2期)2017-05-04
中国工程咨询(2017年12期)2017-01-31
小天使·二年级语数英综合(2015年12期)2015-12-04
全球定位系统(2015年4期)2015-02-28