基于彩色编码光栅投影的双N步相移轮廓术
2019-07-12 08:09王建华杨延西
中国光学 2019年3期
王建华,杨延西
(西安理工大学 自动化与信息工程学院,陕西 西安 710048)
1 引 言
光栅投影三维测量具有非接触、速度快、测量精度高、测量范围广等特点,广泛应用于逆向工程、工业检测、质量控制、虚拟现实、医学诊断、文物修复等领域。光栅投影三维测量的原理是,通过数字投影仪将编制好的光栅条纹投射到被测物体上,经过物体调制后形成变形条纹,相机采集变形条纹并传给计算机,经过解相位主值和相位展开,得到实际相位分布,并代入到相位-高度计算公式解算出被测物体高度[1-4]。其中,解相位主值(也称为解包裹相位)对最终的三维测量精度影响很大,普遍采用的方法包括相移法[5-7]、傅立叶变换法[8]和小波变换法[9-11]。其中,傅立叶变换法和小波变换法只需要一幅光栅条纹即可解包裹相位,但其测量精度一般低于相移法。
相移法[5-7]至少需要3幅以上的光栅条纹才能解包裹相位,其解相位精度高,对环境和噪声不敏感,但仍存在一些误差源:譬如相移机构的相移误差、光栅图像的随机噪声和光栅图像的非正弦化等,都可能导致相位误差的产生。(1)相移机构的相移误差是由于相移步距的不相等所致,在机械式的相移装置中是不可避免的,但是使用数字投影仪(DLP)进行光栅投影,利用计算机准确生成相移图像并投影,所产生的误差基本可以忽略;(2)相移算法对随机噪声具有较好的抑制作用,且相位计算前可以通过高斯滤波等方法对图像进行预处理,从而较好地解决了该问题,因此也不需要考虑该误差源;(3)光栅投影三维测量系统中的DLP和CCD相机一般为非线性设备,设计好的具有正弦分布的光栅条纹图案由DLP投影以及CCD相机采集后,得到的光栅条纹图不具有良好的正弦性,从而导致相位误差。虽然通过投影和采集较大数量的光栅条纹图案,譬如二十步相移法,可以削弱以至消除该测量误差,但是对于常用的三步、四步和五步相移算法而言,由这种非线性响应引起的测量误差是光栅投影测量系统主要误差来源。
Zhang等人[12]根据相移轮廓术中的近似正弦分布相位误差规律,建立一个相位误差查询表格,根据误差查询表格对相位误差进行补偿,均方根相位误差可以减少13倍以上。Baker等人[13]给出精确的Gamma数学模型以确定Gamma失真与相位误差之间的关系,补偿后相位的均方根误差值可以减少60倍。Pan等人[14]提出了一种新的简单的迭代相位补偿算法来补偿非正弦相位误差。Cai等人[15]提出了一种基于Hilbert变换的柔性相位补偿方法。Yatabe等人[16]提出了一种畸变补偿的后处理方法,并声称不需要Gamma数学模型。Zhang等人[17]通过在相机原始采集的条纹图案上叠加特定的谐波,再通过调整谐波的振幅抑制相位误差,从而降低了运算量。Huang等人[18]提出了一种双三步相移算法,该方法在投影一套三步相移光栅条纹的基础上,再投影一套相位差为60°的三步相移光栅条纹,两次执行三步相移算法获得两幅主值相位图,分别展开后,对两幅展开相位图进行融合,得到融合展开相位。实验证明,该方法能有效的降低光栅投影测量系统的非线性误差,且不需要复杂的数学模型。但该方法需要增加一倍的光栅数量,降低了测量效率。针对这一问题,本文提出了一种基于彩色编码光栅投影的双N步相移轮廓术。该方法将初始相移条纹和相位差为π/N(N为相移次数)的附加相移条纹编码成绿色和蓝色条纹,融合到一幅彩色光栅条纹中,即RGB三基色的G分量和B分量,同时投影和采集,从而不需要增加任何额外的光栅条纹,提高了测量效率。
2 单N步相移法及其误差分析
2.1 单N步相移法
光栅投影条纹一般为正(或余)弦条纹,条纹的灰度值可表示为:
g(x,y)=a(x,y)+
b(x,y)cos[2πf0x+φ(x,y)] ,
(1)
式中:a(x,y)为背景光强值,b(x,y)为调制强度,f0为载波频率,φ(x,y)为被测物体高度调制相位。
沿着垂直于光栅条纹方向在一个周期内移动N次,N∈[3,5]。当N=3时称为三步相移法,当N=4时称为四步相移法,当N=5时称为五步相移法。条纹的灰度值可表示为:
gi(x,y)=a(x,y)+b(x,y)
cos[2πf0x+φ(x,y)+2π(i-1)/N] ,
(2)
式中:N表示总的相移次数,i表示第i次相移,i∈[1,N]。
单步相移法解相位主值(解包裹相位)公式:
(3)
式中:gi(x,y)为第i次相移条纹像素点(x,y)的灰度值,N表示总的相移次数,ψ(x,y)表示包裹相位,φ(x,y)表示实际相位(展开相位),rem代表MATLAB中的取余算子。
单三步、四步和五步相移法的包裹相位求解公式如下:

(4)

(5)

(6)

图1 包裹相位和展开相位的一行Fig.1 A line of wrapped phase and unwrapped phase
对一个平整平面进行三维测量时,在测量系统没有非线性误差的理想情况下,平整平面的任一行像素的包裹相位(不考虑包裹相位的跳变点)和展开相位应为直线,而三步、四步和五步相移法获得的实际包裹相位和展开相位如图1所示。可以看出,在包裹相位图中,不考虑相位跳变点时,折叠在(-π,π)之间的连续包裹相位不是直线,近似为正弦波;而实际展开相位也没有呈现出理想直线,近似为正弦波,该误差正是由于光栅条纹图案的非正弦性导致的。
2.2 误差分析
图1的实验结果证实,相移法计算得到的实际包裹相位和实际展开相位都不是直线,近似为正弦波。下面,基于理论推导分析该误差。
CCD相机拍摄的非正弦性光栅条纹图的灰度值函数可由五阶傅立叶级数表示,如式(7)所示:
(7)
根据式(3)和式(7)可得到实际包裹相位ψc(x,y)为:
(8)
令Δψ(x,y)表示实际包裹相位和理想包裹相位之差,则:
(9)

(10)
根据式(3)、(7)和(10)可得,光栅条纹非正弦性导致的三步、四步和五步相移的相位主值误差可近似表示为:
ΔψN(x,y)=-csin[Nψ(x,y)] ,
(11)
式中:ΔψN(x,y)是包裹相位误差近似值。
由公式(11)看出,相位误差近似符合正弦分布规律,与2.1的实验结果一致。正弦分布的周期与相移算法的步数N以及理想相位ψ(x,y)有关。
2.3 误差补偿
根据上面的分析知,相位误差近似符合正弦分布规律,如果引入另一套相移条纹,其与原相位误差相反,则可以融合两部分相位信息,大幅减小系统非线性响应所致的相位误差。
(12)
cos[2πf0x+φ(x,y)+2π(i-1)/N+π/N] .
(13)
附加相移条纹与初始相移条纹之间的相位差为π/N,双三步相移法的初始相位差设计为60°,双四步为45°,双五步为36°。附加相移条纹的包裹相位可由下式获得:
(14)
式中:ψE(x,y)是附加相移条纹的包裹相位。
3 基于彩色编码光栅投影的双N步相移法
在投影和采集一套相移条纹的基础上,引入附加相移条纹,融合两部分相位信息可以大大减小相位误差。该方法称为双步相移法,它不需要数学模型,算法简单有效,但需要增加一倍的投影条纹数量,降低了测量效率。如果采用RGB三基色编码光栅条纹,则可以将原始和附加两套相移条纹(灰度符合正弦或余弦变化)做成双色,然后融合为一套彩色相移条纹。该方法既能有效减小相位误差,又没有增加测量系统的条纹投影和采集次数,缩短了测量时间,提高了测量效率[19-21]。
3.1 彩色光栅条纹设计
基于RGB三基色的编码光栅条纹为三维矩阵,表示为:
(15)
式中:R(i,j)、G(i,j)和B(i,j)代表三维矩阵Ir的3个分量,即纯红R分量、纯绿G分量和纯蓝B分量。
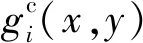
如果光栅条纹为768 pixel×1 024 pixel,三维矩阵如图2(a)所示。这里选择三维矩阵的G分量和B分量,彩色光栅条纹生成如图2(b)所示。当投影条纹的频率为64/1 024(即周期数为64)时,一个周期包含1 024/64=16 pixels。采用四步相移法,绿色和蓝色两套投影条纹都为4幅,并且两套投影条纹的对应图像之间的相位差为π/4,即1/8周期,因此绿色和蓝色投影条纹之间的像素偏移为16×(1/8)=2 pixels。分别取绿色和蓝色两套条纹的第1幅,其关系如图2(c)所示。
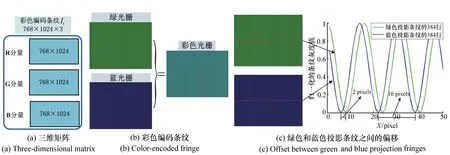
图2 彩色光栅条纹形成示意图Fig.2 Schematic of color-encoded grating fringe formation
3.2 包裹相位融合
图3为彩色光栅条纹的生成、投影、采集和GB分量提取。采用四步相移法时,共有4幅相位差为2π/N的彩色条纹,GB分量提取后得到8幅灰度图,其中4幅为初始相移条纹,另外4幅为附加相移条纹。
图4是包裹相位的融合过程。被测对象是平整的平面,图4(a)是绿色投影光栅条纹的包裹相位ψ(x,y)的第300行和蓝色投影光栅条纹的包裹相位ψE(x,y)的第300行,采用四步相移算法获得。图4(b)是将ψE(x,y)加上π/4后,得到[ψE(x,y)+π/4]与ψ(x,y)的第300行,二者相位误差相反。图4(c)是融合ψ(x,y)的第300行和[ψE(x,y)+π/4]的第300行后,得到融合包裹相位ψS(x,y)的第300行。两包裹相位的融合按式(16)计算。图4(d)是绿色投影光栅条纹的展开相位φ(x,y)、蓝色投影光栅条纹的展开相位φE(x,y)和融合后的展开相位φS(x,y)的第300行,结果证明,融合后的相位误差明显减小。
图3 彩色光栅条纹的生成、投影、采集和GB分量提取Fig.3 Generation, projection, capture and GB component extraction of color-encoded grating fringe
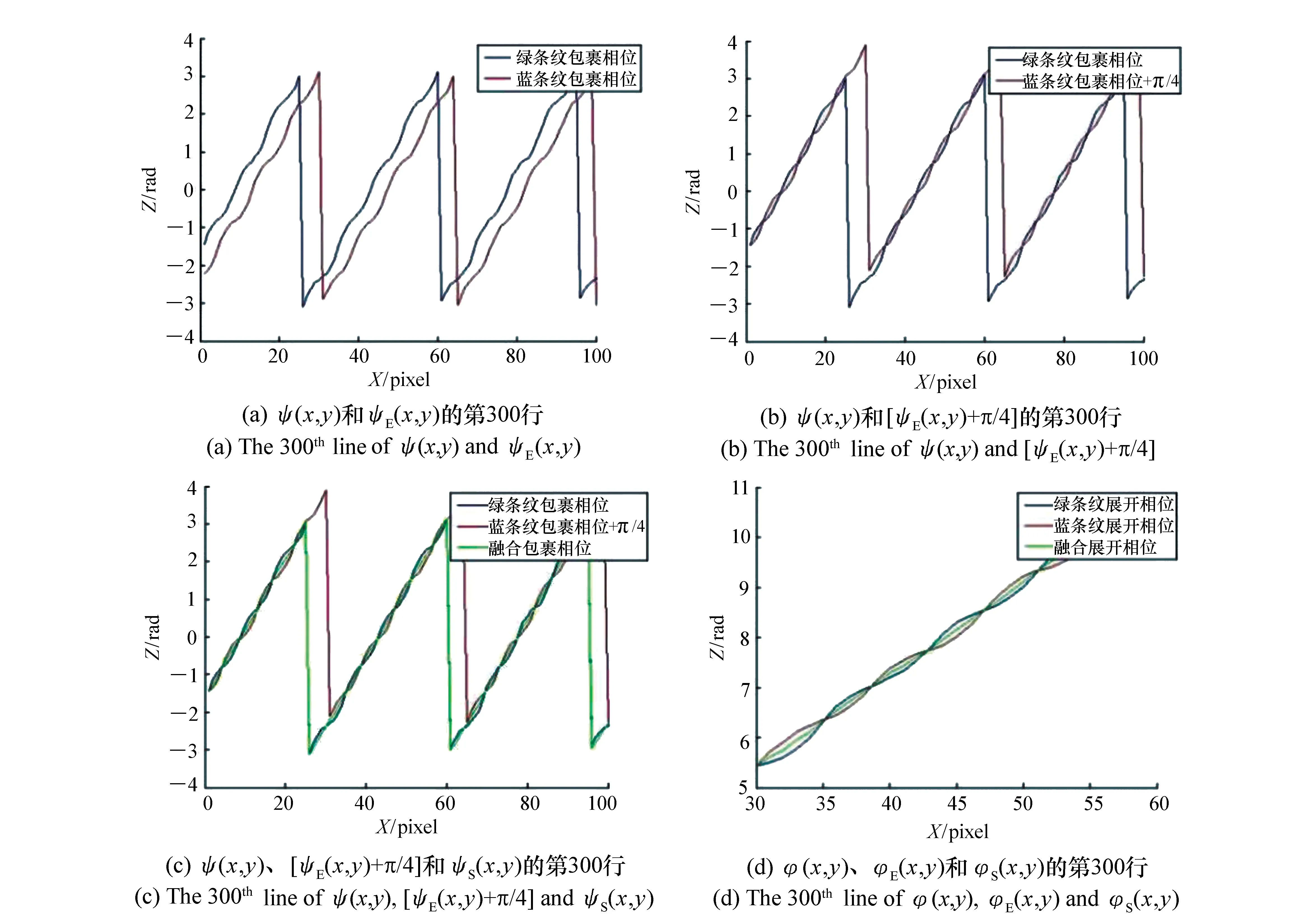
图4 双步相移法的相位融合Fig.4 Phase fusion of double step phase-shifting method
(16)
4 实 验
测量系统主要由数字投影仪(三星SP-P4 10M)、CCD相机(大恒彩色相机DH-GV400UC)和个人计算机(Intel Core i5-4258U CPU, 4G RAM)组成,如图5所示。图5(a)为光栅投影三维测量流程图,图5(b)为实验三维测量系统。
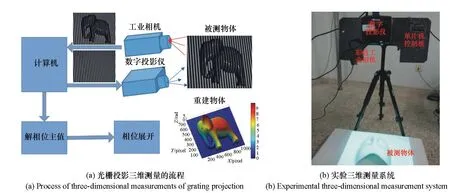
图5 三维测量系统Fig.5 Three-dimensional measurement system
4.1 测量精度的对比
由于相位展开一般分为时间相位展开和空间相位展开两大类,为验证所提方法结合两类相位展开方法的有效性,在单步相移法和基于彩色编码光栅投影的双步相移法得到包裹相位后,相位展开分别采用两类方法的典型代表,即枝切法和三频外差法。
4.1.1 相移法与枝切法结合解相位
枝切法是美国喷气推进实验室的Goldstein等[22]提出的,是一种典型的路径相关类的空间相位展开方法。其核心思路是识别图像中的所有残差点并标注其极性,连接各个残差点并使枝切线上所有残差点极性值之和为零,相位展开时需绕过枝切线,最后残差点相位将根据其相邻已展开像素点展开。它只需要一幅包裹相位即可相位展开,但相位展开精度低于时间相位展开方法。
以葫芦模型作为被测物体,解包裹相位分别采用单步相移法和基于彩色编码光栅投影的双步相移法,相位展开都采用枝切法。实验结果如图6所示,图6(a)为相机采集的变形条纹,图6(b)为Goldstein枝切法构造的枝切线分布,枝切线上的像素点最后展开,以避免误差传播和扩大化,但枝切线上的像素点不可避免地存在相位展开误差,这也是其相位展开精度低于时间相位展开方法的原因所在。图6(c)和6(d)为分别采用单步相移法和基于彩色编码光栅投影的双步相移法得到包裹相位后,利用Goldstein枝切法处理后的相位展开结果。可见,图6(d)的面形比图6(c)的面形更为平滑。为进一步对比结果,在图6(c)、6(d)中取某一行像素的相位展开结果,如图6(e)和6(f)所示。可以看出单步相移法的展开相位存在褶皱且呈现近似正弦波的变化,而基于彩色编码光栅投影的双步相移法的展开相位更好。
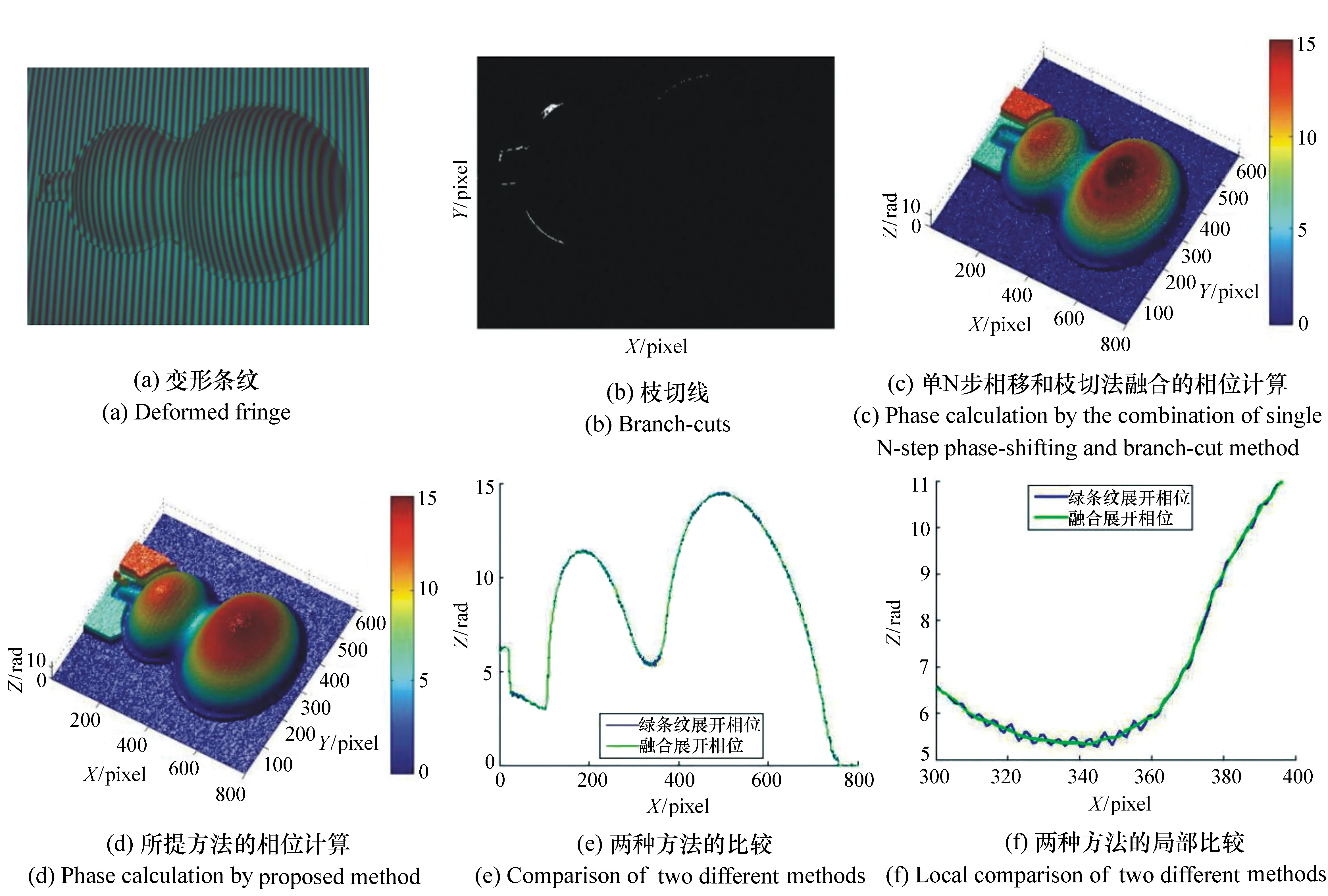
图6 相移法与枝切法结合解相位Fig.6 Phase calculation by the combination of phase-shifting method and branch-cut method

图7 三频外差法的原理Fig.7 Principle of three-frequency heterodyne method
4.1.2 相移法与三频外差法结合解相位

以面具作为被测物体,解包裹相位分别采用单步相移法和基于彩色编码光栅投影的双步相移法,相位展开都采用三频外差法。实验结果如图8所示,图8(a)为相机采集的变形条纹,图8(b)和8(c)为分别采用单步相移法和基于彩色编码光栅投影的双步相移法得到包裹相位后,都采用三频外差法的相位展开结果。如图8(d)为局部放大图。可以看出,基于彩色编码光栅投影的双步相移法的展开相位要优于单步相移法的展开相位。

图8 相移法与三频外差法结合解相位Fig.8 Phase calculation by the combination of phase-shifting and three-frequency heterodyne method
4.2 测量效率的对比
采用四步相移法和三频外差法解相位时,基于灰度光栅投影的双步相移法所需的投影条纹为3×4×2=24,而本文所提的基于彩色编码光栅投影的双步相移法所需的投影条纹为3×4×1=12。采用四步相移法和枝切法解相位时,基于灰度光栅投影的双步相移法所需的投影条纹为4×2=8,而本文所提的基于彩色编码光栅投影的双步相移法所需的投影条纹为4×1=4。较少数量的光栅条纹具有两个优点:一是减少了测量时间;二是减少了程序的运行时间。以四步相移法和三频外差法解相位为例,实验中条纹投影与采集为同步,帧间时间间隔为0.1 s,因此24帧图像投影与采集所需时间约为2.4 s,而12帧图像投影与采集所需时间约为1.2 s。在计算机配置为Intel Core i5-4258U CPU和4G RAM时,两种方法的程序执行时间分别为2.15 s和3.8 s,因此,原方法总耗时约为6.2 s,所提方法总耗时约为3.35 s,测量效率提高了约46%。

表1 条纹数量Tab.1 The number of fringes
4.3 适用条件分析
彩色编码光栅条纹对被测物体的颜色有限制,适用于浅色物体(如白色物体)的测量。当测量彩色物体时,被测物体的色彩会对彩色条纹产生严重干扰,导致解相位误差。此外,相较于灰度条纹,彩色条纹对外界光照更为敏感,为保证测量精度,应降低环境光照(如太阳光照)对被测物体的影响。
理想情况下,CCD相机采集的彩色条纹的3个通道分量之间互不影响,每一个颜色通道的条纹都对应于投影条纹的光强信息。但是,彩色CCD相机像元前的滤光片的光谱特性与投影仪的三色滤光片的光谱特性不完全相同,所以当滤光片将彩色光分成3个频段后会产生颜色串扰,或者说每一个颜色通道的条纹强度都掺杂了一定比例的其他两个通道的条纹信息[25],如图9所示。
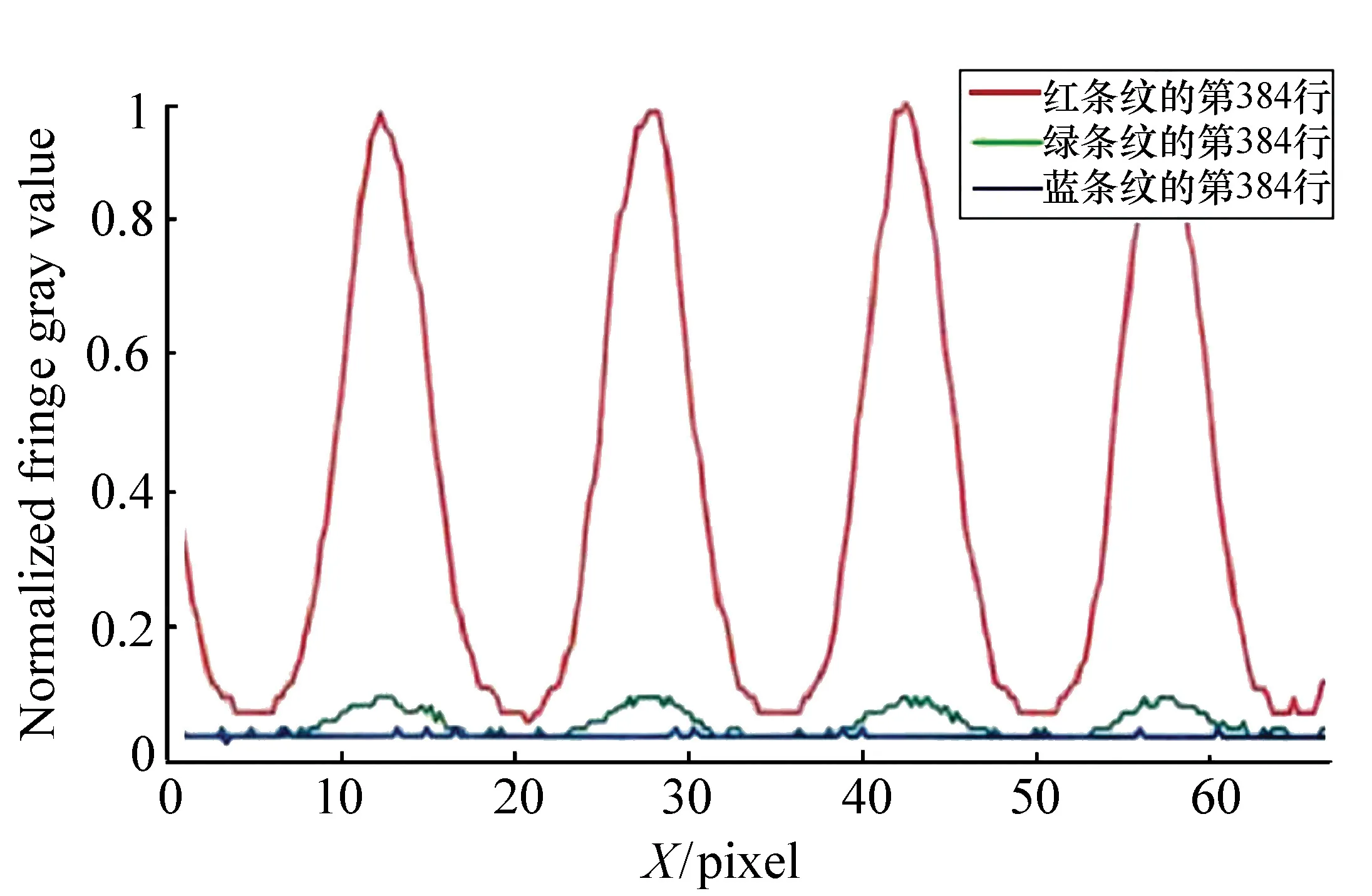
图9 红色采集条纹的颜色串扰Fig.9 Color crosstalk of red grating fringe
虽然颜色串扰会导致条纹强度分布的改变,但通过图9可以看出,其他两个颜色通道的信息强度明显小于红色分量强度,并且现有的色彩串扰的方法一般需要增加投影条纹数,如文献[26]所提出三通道分别投影12幅条纹,然后选取最优的解相位结果,但需要36幅条纹,这与测量效率的提高相违背。所提方法在降低光栅条纹的正弦性所致的解相位误差方面依然有效,且测量效率大大提高。下一步,将研究既不需要增加条纹数量、又能有效地对色彩串扰进行校正的方法。
5 结 论
本文提出了一种基于彩色编码光栅投影的双N步相移轮廓术。该方法将原相移条纹和附加相移条纹编码成双色条纹,融合到一幅彩色光栅条纹中,同时进行投影和采集,提取出原相移条纹和附加相移条纹后,分别解包裹相位,融合两幅包裹相位信息以减小相位误差。本文详细阐述了所提方法的原理,并将其与枝切法和三频外差法结合解相位,实验结果证明,所提方法能有效降低相位误差,且不需要增加任何额外的光栅条纹,测量效率提高了46%。
猜你喜欢
新高考·高三数学(2022年3期)2022-04-28
小福尔摩斯(2019年2期)2019-09-10
制造技术与机床(2019年7期)2019-07-22
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
电子制作(2019年24期)2019-02-23
中学生数理化·高一版(2018年6期)2018-07-09
理科考试研究·高中(2017年7期)2017-11-04
北方交通(2016年12期)2017-01-15
中学生数理化·高二版(2016年9期)2016-05-14