小型消费级无人机在获取大比例尺地形数据中的应用研究
2019-07-19 06:24姬洪亮
价值工程 2019年8期
姬洪亮

摘要:以某测区1:1000地形图测绘项目为例,介绍了利用小型消费级无人机DJI Phantom 4 Pro和PhotoScan影像处理软件获取4D产品的基本流程。通过GNSS RTK实测数据与获取地形数据进行精度评价,平面中误差为0.136m,高程中误差为0.072m,结果满足规范要求,而且对更大比例尺地形图测绘也有借鉴意义。
Abstract: Taking a surveying project of 1:1000 topographic map as an example, this article introduced the basic process of acquiring 4D products using small consumer UAV DJI Phantom 4 Pro and PhotoScan image processing software. Through accuracy evaluation by GNSS RTK measured data and acquired topographic data, the mean error is 0.136m in the horizontal direction and 0.072m in the vertical direction. The result meets the specification requirements, and the mapping of larger scale topographic maps is also useful for reference.
关键词:小型消费级无人机;遥感系统;大比例尺;地形数据
Key words: small consumer UAV;remote sensing;large scale;topographic data
中图分类号:P231.5 文献标识码:A 文章編号:1006-4311(2019)08-0176-04
0 引言
随着社会经济及科学技术的进步,国土资源及其他各行各业对大比例尺、高分辨率数据的需求也日益增加,以此为契机,无人机低空数字遥感领域也得到飞速发展。在制作成本和操控性方面有了革命性的发展,从而使无人机从传统的军事、航测等专业领域步入大众消费市场,无人机在获取数据成本低、机动灵活、速度快、空间分辨率高等优点,在国情监测、地质、精准农业、环境监测及城市规划等领域获得了广泛的应用[1]。
根据应用领域的不同可将无人机分为大型专业级和小型消费级。已有学者通过研究表明大型专业级无人机的测量精度可以达到厘米级,但大型专业级无人机工作流程繁琐,操控难度大,需要专业操控手而且必须申请飞行空域,天气变化也很容易影响其工作状态,因此限制了其快速灵活的获取地形数据。相对而言,小型消费级无人机具有易上手、低成本、高效率及飞行灵活等优势[2]。然而,目前针对小型消费型无人机获取大比例尺地形数据和对获取的数据精度研究不足,亟待进行更加深入的探讨。本文以此为出发点,选择一小面积测区通过小型消费级无人机获取大比例尺地形数据,并结合RTK实测数据验证评价获取地形数据的精度。
1 无人机遥感系统
无人机遥感(UAV Remote Sensing, UAVRS)是利用先进的无人机驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通信技术、POS定位定姿技术、GPS差分定位技术和遥感应用技术,具有自动化、智能化、专业化快速获取国土、资源、环境、事件等空间遥感信息,并进行实施处理、建模和分析的先进新兴航空遥感技术解决方案[3]。
现阶段无人机类型主要有无人直升机、固定翼无人机、多旋翼无人机等多种类型,各类型无人机都有不同的应用领域和技术特点。多旋翼无人机飞行速度、飞行高速可以自由调整,可低空飞行且几乎不受起降场地的限制,操作方便、简单灵活,更适宜于小面积大比例尺地形数据的获取,因此笔者选用大疆创新科技精灵系列四旋翼小型消费级无人机(DJI Phantom 4 Pro)。
Phantom 4 Pro由飞行器、遥控器、云台相机以及配套使用的DJI GO 4 APP组成,飞行器重为1388g,飞行器机身内部集成了飞控系统,具备指南针系统和双冗余惯性测量单元,机身配备先进的视觉定位以及障碍物感知系统,配备全新24mm低畸变广角相机、高精度防抖云台以及1英寸CMOS图像传感器,云台配备精度为±0.02°的影像稳定系统,可以拍摄高质量2000万像素JPEG以及无损RAW格式像片。最大水平飞行速度为20米/秒,工作时间约为30分钟。
2 应用实例
2.1 外业数据获取
研究以某测区1:1000地形图基础测绘项目为例,测区面积约为2km2,地形为丘陵,海拔最高1911m,最低为1717m,测区地物为草地,有少量道路和房屋,房屋多为平房。测区像片控制点(以下简称像控点)采用统一的区域网布设方案,要求所有的像控点为平高控制点,一个飞行架次内不得少于3个像控制点,在测区范围内均匀布设9个像控点,像控点的平面及高程测量均采用GPS RTK测量技术进行测量,平面控制点相对临近基础控制点的平面位置中误差不应超过地物点平面位置中误差的1/5,高程控制点相对临近基础控制点的高程中误差不应超过基本等高距的1/10[4]。
工作过程中选用大疆创新科技研发的DJI GS PRO地面站,它是一款强大的无人机操作及综合管理的iPad端应用程序。通过直观简易的交互设计,只需要简单的屏幕操作就可以完成规划复杂的航线任务,实现全自动航点飞行作业。可以通过自主设计飞行航线、飞行速度、拍照间隔、拍照模式、航向旁向重叠度等参数,实例中航摄设计航高为200m相对航高,设计20条航线,分两个架次完成,共拍摄512张像片。航向重叠度为80%,旁向重叠度为65%,摄区边界覆盖一般不少于像幅的30%;每条航线首尾位置按超出摄区所在图幅边界外至少各一条基线。航摄比例尺为1:1000,拍摄得到的像片地面分辨率为7.6cm。外业作业流程严格执行《低空数字航空摄影规范》要求,既要保证具有充足的光照度,又要避免过大的阴影,航摄时间限制在上午11时至下午17时之间,从而保证飞行质量,在完成摄影后,要仔细进行质量检查,质量检查内容包括:①影像清晰度;②重叠度及航摄漏洞;③航摄区域与成图区域覆盖情况;④航片的倾角、旋偏角、航线的弯曲度符合技术要求。如有不符合要求的情况,需要及时进行补飞,务必最终检查原始航片图像清晰、曝光准确、无航摄漏洞、重叠度和图像质量达到规范要求。
2.2 内业数据处理
无人机遥感影像数据处理原理同数字摄影测量原理一样,也是对在两点拍摄的具有规定重叠度的2张影像,建立摄影瞬间投影中心、地物和影像之间的共线方程,根据地面控制点(ground control point,GCP)的实际坐标,算出与影像连接点(tie point,TP)对应的地物三维坐标[5]。
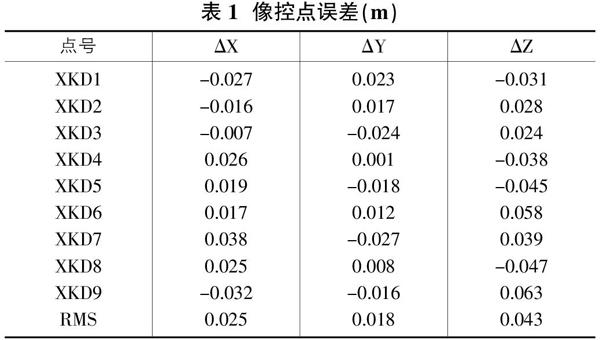
本次选用的影像处理软件是PhotoScan,PhotoScan可以从一组具有相关参考信息、并且具有一定重叠度的图像中声称地理参考密集点云,纹理多边形模型,数字高程模型以及数字正射影像图。首先将获得的各项原始数据进行收集整理及预处理,导入影像处理软件PhotoScan中,通过POS数据及相应相机参数可计算出照片姿态及位置;对齐照片,PhotoScan可以在此阶段找到重叠相片之间的匹配点,计算每张相片的相机位置并构建稀疏点云模型;放置标记(刺点),标记用于优化摄像机位置和方向数据,从而可以获得更好的模型参考结果,将9个均匀分布在测区内的地面控制點(GCP)坐标准确的标记在含有GCP的相片上;检查每张相关相片上的标记点位置,并在需要时优化位置从而提高精度,为了在计算相机外部和内部参数以及校正可能的失真时获得更高的准确度,应该运行优化相机对齐程序,像控点残差如表1所示;从工作流程菜单中选择“建立密集点云”命令,基于估计的相机位置,程序计算出每个相机的深度信息,以组合成单个密集点云;在建立密集点云之后,基于密集点运数据生成多边形网络模型;基于密集点云或网络模型生成数字高程模型;从工作流程菜单中选择“Build Orthomosaic”命令生成正射影像,最后便可导出DEM、DOM[6]。
地形数据获取采用全数字立体测图技术方法,采用“由内业至外业”的作业流程。依据“内业定位,外业定性”的宗旨,通过无人机遥感影像数据和空中三角测量成果,利用全数字摄影测量工作站进行高自动化的数据处理,极大的减少人工干预,获取地形图地貌、地物要素,然后通过外业对地形数据进行全面的修测补测和属性调查。最终通过数字正射影像图和野外调绘完成数字线划图的制作。本次数字处理流程如图1所示。
3 结果分析
3.1 误差来源分析
在航空摄影理论中,对于产品结果精度的分析可通过像点的精度、定向点的精度以及检查点的精度来考虑,而且通常来说,外业飞行质量、相片获取质量、相片地面分辨率、空三加密精度都会对最终数字产品的精度产生影响[8]。一般来说,影响空中三角测量精度的原因主要包含两大类:一个是对原始观测数据精度产生直接影响的因素,例如航摄仪参数(像元数、像元尺寸、像元角、焦距、像移补偿等)、航摄比例尺、空中三角测量作用过程中使用的测量仪器和摄影材料的稳定性以及像片系统误差的改正等;另一个是影响区域网几何强度的要素,包括布设区域网像控点的采集精度、像控点数量和分布情况、航线设计的规律及重叠度的大小、辅助数据(GPS/POS)的使用情况、空中三角测量数据处理过程中控制点权值大小的设置等。结合本次实验发现外业像控点标记时产生了较大的误差,产生的原因主要是外业像控点的的布设位置不够合理(布设像控点位置不够平坦)、像控点标记不够明显,不易判读。造成在内业处理时进行像控点标记时目标点不明确,刺点精度低;像控点布设位置不够平坦会带来较大的高程残差。同时在以后的研究过程中可以考虑多种像片控制点的布设方案,从而来比较区域网布设方案对空中三角测量精度的影响。
3.2 数据产品精度评估
通过PhotoScan软件处理生成的测区正射影像和数字高程模型如图2图3所示,该影像没有经过后期处理,通过目视判读可以初步看出DOM数据拼接效果较好,无错缝,色调也较均匀,明暗反差适宜,地物判读比较容易。
为评估地形数据测绘产品的几何精度,采集像控点阶段,在测区范围内按照均匀分布的原则,依照像控点测量的要求同时采集一定数量的平高检查点用来进行精度检测。实际工作中通过GNSS RTK测量一定数量的检查点,以真实坐标作为参考值来评定最终地形数据的精度,可以在外业布设控制点时直接布设平高检查点,也可以在外业调绘过程中采用全野外解析法,测取一些特征明显的地物点作为检查点,如房屋角点、构筑物拐点作为平面检查点,在高程变化较小的地方设置高程检查点。研究中在测区通过GNSS RTK实测了29个平高检查点,将这些检查点的数值与数字线划图和点云数据进行对比,检查点的平面中误差和高程中误差可按照公式(1)计算[7],误差统计结果见表2、表3。
式中,m1为检查点中误差,Δ为检查点野外实测值与解算值的误差,n为参与评定精度的检查点数。
从表2、表3中可以看出,无人机遥感影像处理结果最大平面误差为0.267m,平面中误差为0.136m,平面误差在5-10cm的占比28%,平面误差在10-15cm的占比52%,平面误差在15-20cm的占比10%,平面误差在20cm以上的占比10%;最大高程误差为0.187m,高程中误差为0.072m,高程误差在5cm以内的占比66%,高程误差在5-10cm的占比21%,高程误差在10-15cm的占比10%,高程中误差在15-20cm的占比3%,误差没有大于20cm的检查点。平面精度和高程精度都比较好,而且误差分布规律符合标准正态分布。根据《GB/T 23236-2009 数字航空摄影测量空中三角测量规范》要求,1:1000比例尺在检查点平面和高程误差最大限值分别为0.50m和0.28m,本次结果远高于限差要求,且检查点中有86%的平面误差和90%的高程误差值满足1:500比例尺检查点平面和高程最大限值0.175m和0.150m的要求,因此小型消费级无人机在获取更大比例尺地形数据中的应用前景依然广阔。
4 结束语
本文对小型消费级无人机在获取大比例尺地形数据应用技术进行了探索,以某小面积测区项目进行实验,获取了测绘4D产品。通过此次实验我们可以了解到小型消费级无人机获取数据的整个流程,通过PhotoScan对无人机影像数据进行处理,得到了高质量的地形数据,平面中误差为0.136m,高程中误差为0.072m,可满足1:1000地形图的精度要求,数据处理结果精度明显优于项目精度要求,而且对于更大比例尺的测量项目也可采用该方案。小型消费级无人机低空摄影测量技术的优势在研究中得到了充分的体现,既可以快速、高效的完成工作任务,又节约了大量的人力和物力成本,小型消费级无人机在今后的应用前景将更加广阔。
参考文献:
[1]毕凯,李英成,丁晓波,等.轻小型无人机航摄技术现状及发展趋势[J].测绘通报,2015(3):27-31,48.
[2]张纯斌,杨胜天,赵长森,等.小型消费级无人机地形数据精度验证[J].遥感学报,2018,22(1):185-195.
[3]李德仁,李明.无人机遥感系统的进展与应用前景[J].武汉大学学报·信息科学版,2014,39(5):505-513,540.
[4]國家测绘局测绘标准化研究所.GB/T 7931-2008 1:500 1:1000 1:2000地形图航空摄影测量外业规范[S].北京:中国标准出版社,2008.
[5]张祖勋,张剑清.数字摄影测量学[M].武汉大学出版社,2012.
[6]邹长慧,周忠发.喀斯特高原山区无人机低空遥感影像数据的获取与处理[J].测绘通报,2012(S1):421-423.
[7]国家测绘地理信息局.GB/T 23236-2009 数字航空摄影测量空中三角测量规范[S].北京:中国标准出版社,2009.
[8]刘元庆,徐柳华,沈彩莲,等.基于无人机飞行器遥感影像的数字摄影测量关键技术研究[J].测绘科学,2010,35(1):28-30.
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
西部交通科技(2021年9期)2021-01-11
国际呼吸杂志(2019年4期)2019-03-12
智能建筑与智慧城市(2018年11期)2018-11-28
中国资源综合利用(2017年2期)2018-01-22
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
中国房地产业(2016年2期)2016-03-01
安徽地质(2016年4期)2016-02-27