基于机器视觉的新型降噪水下生态调查机器人
2019-07-20 13:24马凤瑞曾奕淇杨帆王忆麟鲁奇欣
电子技术与软件工程 2019年10期
马凤瑞 曾奕淇 杨帆 王忆麟 鲁奇欣

摘要:本文研究设计了一种新型微降噪水下生态调查机器人,以水滴型流线设计为运载器舱体,通过六个螺旋桨推进器协作运行实现航行器在水下的全自由度运动。本文使用机器视觉来获取目标信息,基于自动白平衡的视频去雾算法与目标识别技术,经试验验证,该方法能够减小水下可视图像退化的影响,识别被观测物种。
[关键词]水下机器人平衡闭环控制算法机器视觉
为了保证水下跟拍机器人的稳定性,本文采用了类似四旋翼空中无人机的推进器布局来保持水下机器人的姿态稳定性,并采用平衡闭环控制算法,树莓派将传感器测得的信号和反馈信号经过控制器处理后,与上位机给出的命令叠加,并进行动力分配,通过向电机传送PWM信号来调节各个电机的转速,以此让机器人能够进行对外界干扰的补偿,且实现水下机器人航向、姿态、深度的稳定调节,保证水下拍摄的稳定性。
1舱体设计
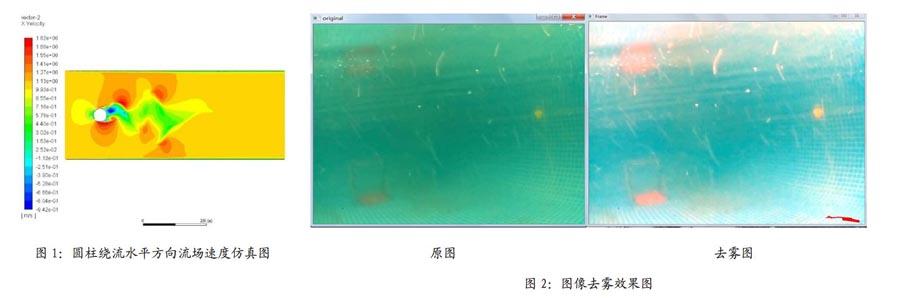
本文使用ICEMCFD进行模型建模,在计算机中建立水滴模型后,再使用Fluent18.0进行流场仿真。选用Laminar层流模型模拟小雷诺数下水滴形相较于圆形对于流场速度分布,以及压强分布的影响,并在2Dspace下进行静态分析处理。如图1所示。
根据上述仿真结果,发现选用水滴形将受到更小的流体阻力,故该设计可行。
在验证水滴模型的可行性后,本文使用Proe设计水滴形舱体。设计水深为浅水,最深下浅深度10m,根据水深压强公式:
P=pgh(p=l000kg/m,g=10m/s",h=10m)可知,水下10m内的相对压强为0.1MPa,绝对压强为2atm。压强不算大,结构体受力不大的情况下,主要考虑舱体密封问题。考虑成本以及密封效果,选用法兰连接配合O型圈密封的方案。
为了便于控制,选择使用类似无人机的四旋翼结构,用来控制机体的水平以及机体的稳定性;同时配合两个水平推进器为舱体提供水平方向更强的推动力。
2动力驱动
针对水下航拍器的动力驱动问题,考虑到在识别水下生物的同时不打扰到其正常作息,固对螺旋桨进行了一定的降噪设计。由于螺旋桨是在非均匀流场中工作,所以不可避免的会出现非定常空泡现象。空泡不仅会引起机器人尾部的震动,而且会引发噪音,是水下机器人最主要的噪音源之一,它还会造成桨叶空泡剥蚀,降低螺旋桨的使用寿命。
针对螺旋桨噪音产生的主要来源一空泡,并且采用的螺旋桨尺寸较小是B型,我们确定了B系列螺旋桨空泡校核的方法.对该系列的螺旋桨,要求伸展盘面比EAR要满足以下公式:
结合设计参数,对其进行3D建模过程,确定二维坐标到三维坐标的转换方法:
3图像处理
水下图像由于低对比度、纹理模糊、色彩失真、光照不均,视野较小等原因难以利用,这种现象叫做图像退化。首先进行图像预处理:
第一步,读取视频流,并逐帧对其进行操作。在图像处理时,为了消除图像中的噪声,通常对其进行开运算,即先进行图像腐蚀再进行图像膨胀。因为腐蚀虽然会去掉噪声点,但也会使前景对象变小,所以再对其做膨胀处理。
第二步,在完成开运算操作后,使用双边滤波来在减少噪声,平滑图像的同時保持物体的边缘。
预处理结束后,利用自动白平衡算法对图像进行去雾处理。为了让测试结果更直观,本文设计了旨在识别红色物体并画出其轨迹的功能试验,其结果如图2。
4结论
本研究外形设计基于流体流动基本方程原理,利用流体连续方程及流体动量方程进行计算。运用层流不可压缩流体理论,使用Laminar层流模型,在2DSpace进行静态分析,分析外形设计的可行性。上述过程的建模部分通过ICEMCFD18.0实现,流体仿真运用Fluent18.0实现,并将可行的方案使用Proe进行三维建模。
参考文献
[1]王奉明.水滴形扰流元的设计和性能研究[D].南京:南京航空航天大学,2005.
[2]吴丙伟.浅水观察级ROV结构设计与仿真[D].青岛:中国海洋大学,2013.
猜你喜欢
ELLE世界时装之苑(2023年1期)2023-05-30
航天制造技术(2021年5期)2021-11-06
数字海洋与水下攻防(2021年2期)2021-05-08
上海航天(2020年3期)2020-07-01
装备制造技术(2020年12期)2020-05-22
——蝴蝶
启蒙(3-7岁)(2020年4期)2020-04-22
系统工程与电子技术(2016年2期)2016-04-16
船海工程(2015年4期)2016-01-05
计算物理(2014年1期)2014-03-11
金属世界(2014年1期)2014-02-09