Trimble RTX技术性能测试与应用分析
2019-07-23 08:59吴建梅房新玉
水道港口 2019年3期
吴建梅,柯 敏*,房新玉
(1.交通运输部天津水运工程科学研究所,天津 300456;2.天津水运工程勘察设计院 天津市水运工程 测绘技术重点实验室,天津 300456)
星站差分技术是近年来快速发展起来的一种定位技术,相对于现有已较为成熟的伪距差分RTD(Real Time Dynamie)和载波相位差分RTK(Real Time Kinematic)技术,前者属于星基差分定位技术,而后者属于陆基差分定位技术,这使得星站差分技术可不受地域条件限制,应用范围更为广泛。
目前,星站差分技术在国内工程测量领域应用较为广泛,在系统分类方面,主要包括Navcom公司的StarFire技术、Fugro公司的Starfix技术、Hexagon公司的TerraStar技术、Trimble公司的OmniSTAR及RTX技术[1]、日本的QZSS技术。在技术应用方面,刘亮以StarFire技术为例,分析星站差分技术相对传统差分技术优势,探讨其在水运工程测量领域的应用与优势[2];张振军、许捍卫等通过StarFire技术在内河航道水深测量定位中的应用测试,表明其能稳定、高效、高精度地应用于大比例尺水下地形测量[3-4];安云松采用OmniSTAR技术在国内外两地采集三组数据进行分析,得出满足采样率及观测时长要求的星站差分静态单点定位坐标均值精度较高,满足石油勘探测量起算点的精度要求[5];万家欢等利用StarFire技术开展远海岛礁控制测量,并与PPP成果进行比对,得出StarFire技术平面精度达到厘米级,可替代PPP来快速获取符合精度要求的控制点坐标[6]。
由于对StarFire及OmniSTAR等差分技术已有大量文献资料进行介绍说明,而对RTX技术系统介绍及精度统计分析较少,因此本文对Trimble RTX技术进行相关性能测试,并结合水运工程测量现状,对其应用领域进行分析说明。
1 RTX系统介绍
1.1 RTX技术简介
RTX(Real-Time eXtended)实时差分扩展技术是Trimble新近开发的一种定位技术,通过将多种创新技术融合在一起,使得用户能够在不采用各类基准站电台或网络参考站链接的情况下,实现在地球表面任何地方进行厘米级定位。其系统组成见图1。

图1 RTX系统组成Fig.1 RTX system composition
RTX系统工作原理为:利用分布于全球的约100个跟踪站,连续获得实时卫星(包括时钟误差、轨道误差)和大气数据,通过高度准确的模型和算法来生成RTX差分数据,然后将差分数据以CMRx格式进行压缩后注入L波段对地静止卫星或互联网后广播到GNSS接收机,从而提高其定位精度。
从本质上说,RTX是采用精密单点定位技术进行定位的,其既可以实现实时精密单点定位,也可用于事后处理。与其他星站差分系统组成类似,RTX系统主要包含GNSS卫星系统、RTX卫星跟踪网络、L波段通信卫星/互联网系统、用户系统。
1.2 RTX服务类型

表1 RTX差分改正服务Tab.1 RTX differential correction services
RTX差分改正支持GPS、GLONASS、QZSS及北斗系统,其服务可应用于农业、林业、公用事业、陆地测量、海洋测量等诸多领域,目前RTX星站差分系统提供多种实时差分改正服务,具体见下表1。
上述初始化时间与使用的接收机类型及使用位置有关,表1所列数值为全球范围内大部分地区初始化时间。在美国部分地区及中、西欧大部分地区,CenterPoint RTX及FieldPoint RTX初始化时间更短,一般优于5 min。如无特殊说明,本文后续所列RTX均特指CenterPoint RTX。
需要注意的是,目前仪器接收的RTX实时差分改正数据采用的坐标参考框架为ITRF2014历元2005.00,与最新的WGS84(G1762)坐标系存在微小差异。WGS84(G1762)与ITRF2008历元2005.00基本一致。
2 RTX性能测试
为验证RTX系统性能,本文通过现场测试进行验证。现场测试控制点K001位于天津市滨海新区天津港周边,靠近渤海海域,周边较为空旷,无明显遮挡地物,测试仪器采用Trimble R10 GPS双频接收机,测试内容包括RTX收敛时间、内符合精度、外符合精度及后处理精度统计。其中内符合精度、外符合精度通过连续观测模式,采集观测时间为11 h、采样间隔为15 s,采用频率为1 Hz的数据进行统计分析;后处理精度采用静态观测模式分别采集2次,每次为2 h的观测数据通过在线解算进行统计分析。


图2 RTX平面及高程收敛时间Fig.2 Convergence time of RTX in plane and elevation
2.1 收敛时间
利用RTX进行测量前均存在收敛过程,收敛时间的长短与接收机类型及测量环境相关,当测量环境发生显著变化时还会存在发散现象[7]。收敛时间包括两种情形:已知控制点成果下收敛时间和未知控制点成果下收敛时间。经过现场测试,在已知控制点成果情况下,通过将控制点成果输入仪器中,RTX能在1 min内快速收敛获得固定解;在未知控制点成果情况下,需等待RTX自动收敛以获得固定解。本次在同一控制点上,通过同一天内测试三次,每次间隔时间为10 min,分别统计RTX收敛精度及收敛时间,具体见图2。
RTX自动收敛过程中,开始时平面及高程精度均较差,瞬时收敛精度均大于1 m,收敛过程中精度受环境影响存在变差情形,但整体呈现逐步收敛至固定状态,此时平面及高程残差均优于10 cm。三次时间测试中,第一次收敛时间约为33 min,第二次收敛时间约为17 min,第三次收敛时间约为14 min,收敛时间逐步缩短,收敛速率基本一致。
2.2 内符合精度
内符合精度主要反映了观测数据的内部质量情况。目前常用的内符合精度统计方法采用各个测量值与组内平均值相比较,即计算所有观测值的平均值,再与每个观测值计算较差[8]。设各观测值li与平均值l得差值为vi=li-l,则内符合精度公式为
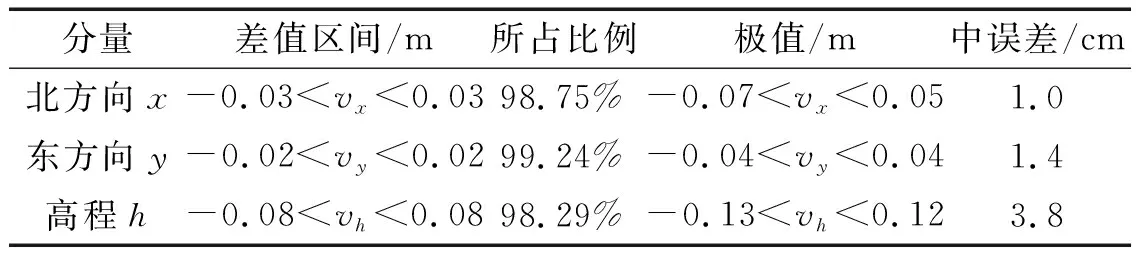
表2 RTX测量内符合精度统计表Tab.2 Statistical of Internal accuracy for RTX measurement

(1)
将测试采集的数据按公式(1)计算,分别得到北方向x、东方向y及高程h的内符合精度统计,具体见表2。
内符合精度统计中,各坐标分量差值的频率及分布情况见图3。

图3 内符合各坐标分量差值统计Fig.3 Difference statistics of coordinate components in internal accuracy
从表2及图3可知,RTX内符合精度统计中,各坐标分量差值分布较为合理,符合正态分布情况,其中北方向x主要差值区间为-0.03~0.03 m、占比98.75%,东方向y主要差值区间为-0.02~0.02 m、占比99.24%,高程h主要差值区间为-0.08~0.08 m、占比98.29%。平面方向中误差优于2 cm,高程方向中误差优于4 cm,内符合精度良好。
2.3 外符合精度
外符合精度主要用于判定系统测量精度,其精度统计采用测量值与真值进行比较,分析RTX系统性误差。将高等级控制点的坐标成果作为真值,计算各个观测值与真值之差,设各观测值li与真值l0的差值为Δi=li-l0,外符合精度公式为
(2)
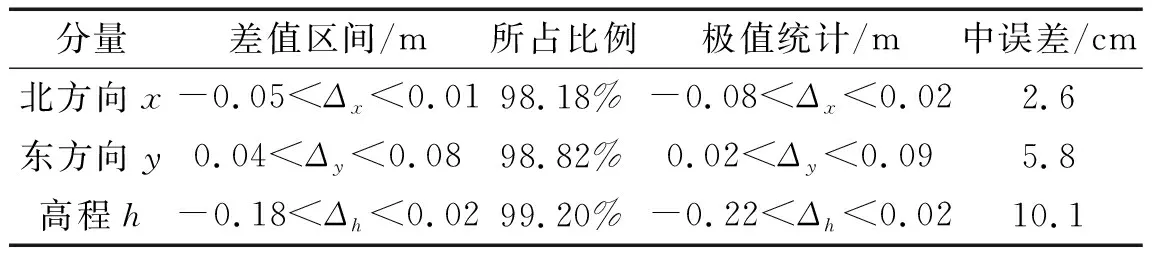
表3 RTX测量外符合精度统计表Tab.3 Statistical of external accuracy for RTX measurement
将测试采集数据按公式(2)计算,分别得到北方向x、东方向y及高程h的外符合精度统计,具体见表3。
外符合精度统计中,各坐标分量差值分布情况见图4。
从表3及图4可知,RTX外符合精度统计中,各坐标分量差值存在明显方向偏差,其中北方向x主要差值区间为-0.05~0.01 m、占比98.18%,东方向y主要差值区间为0.04~0.08 m、占比98.82%,高程h主要差值区间为-0.18~0.02 m、占比99.20%。平面各方向中误差优于6 cm,高程中误差约为10 cm,平面方向精度及离散性均优于高程方向。
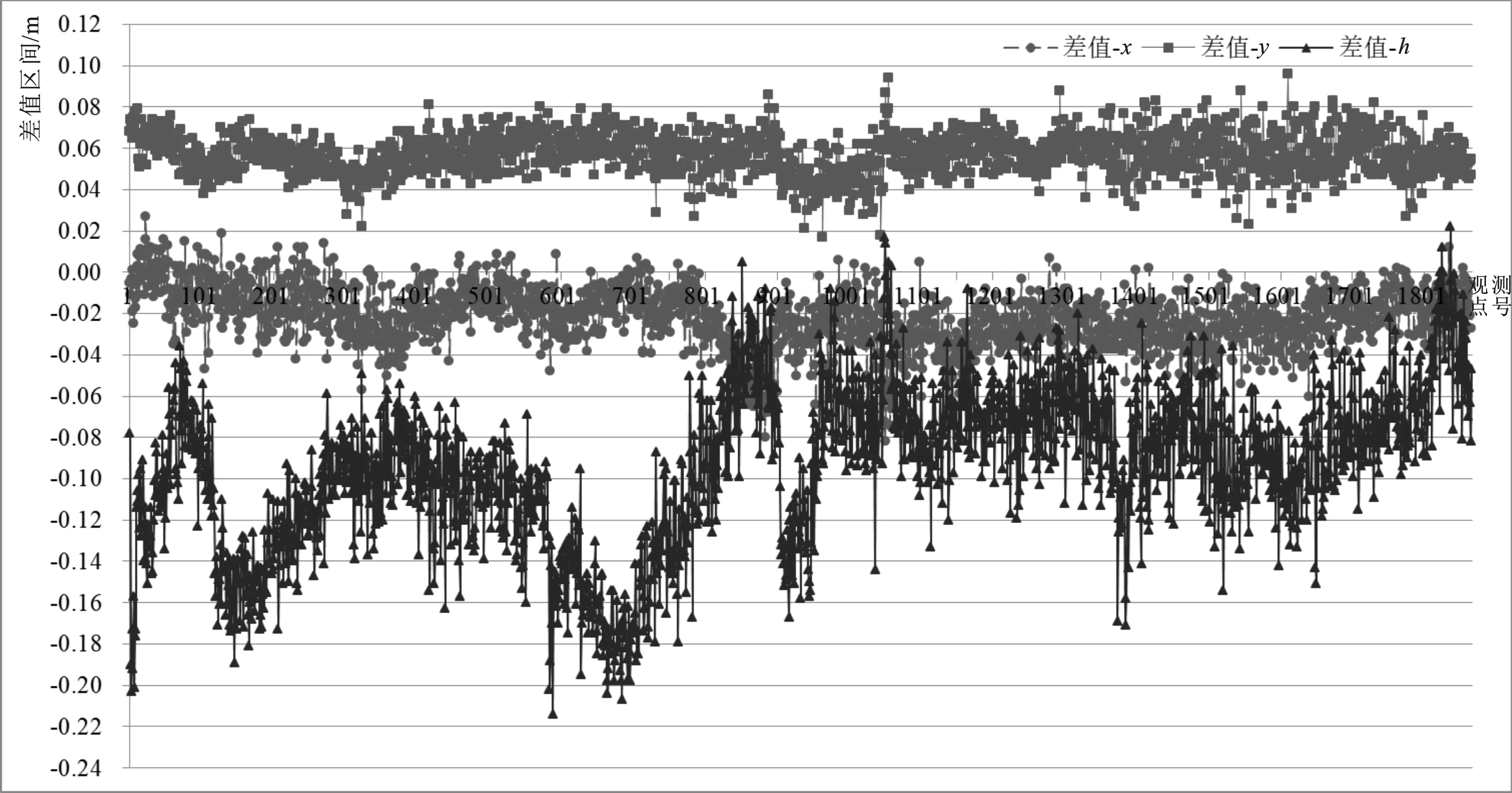
图4 外符合各坐标分量差值分布Fig.4 Difference distribution of coordinate components in external accuracy
2.4 后处理精度
Trimble CenterPoint RTX post-processing(简称RTX-PP)是Trimble公司提供的RTX后处理服务。此应用服务允许用户在线上传符合相关观测要求的静态GNSS数据至Trimble公司RTX后处理服务中心,通过选择不同的坐标系统、地壳板块模型来获取对应的定位解算成果。RTX-PP后处理通过相关算法模型消除或削弱影响定位的各项误差,同时还进行如下解算校正:(1)卫星和接收机天线校正;(2)固体潮汐;(3)波浪潮;(4)海潮加载效应;(5)相对论修正;(6)相位叠加;(7)代码和载波相位偏差[9]。
本次利用在测试控制点K001上采集3次,每次为2 h静态观测数据,选取目前国内施行的2000国家大地坐标系下成果进行精度统计,具体步骤如下:
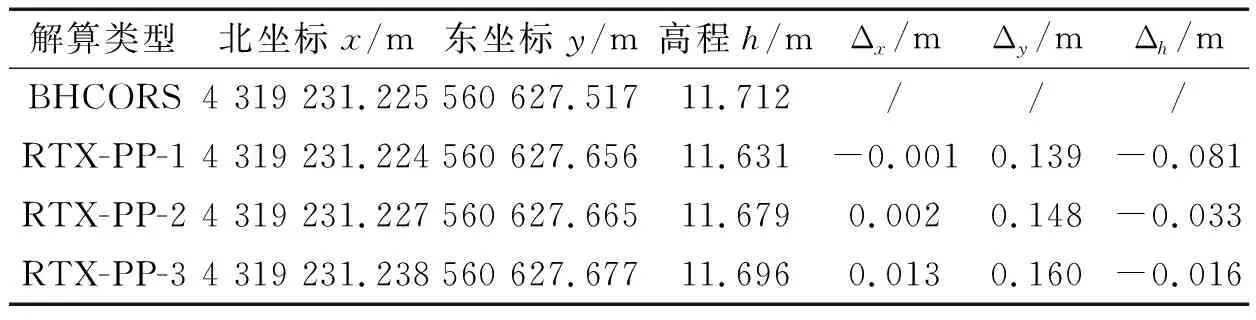
表4 RTX-PP与BHCORS解算结果对比表Tab.4 Comparison of calculation results between RTX-PP and BHCORS
(1)分别将GNSS静态观测数据上传至RTX-PP在线服务中心,坐标系统选择CGCS2000、地壳板块选择自动选取,填写电子邮件地址后几分钟便可收到控制点K001的解算结果。
(2)利用滨海新区连续运行卫星定位综合服务系统(简称BHCORS),通过同步观测,采用静态解算方式获得控制点K001在CGCS2000坐标系下成果。
(3)将BHCORS解算成果作为真值,并与3次RTX-PP解算成果进行比对,结果见表4。
从表4解算结果可以看出:在CGCS2000坐标系下,不同时段3次RTX-PP解算结果平面最大差值为0.025 m,高程最大差值为0.065 m,解算结果符合性较好;RTX-PP解算结果与BHCORS解算结果平面最大差值为0.161 m,高程最大差值为0.081 m,RTX-PP直接解算结果精度为分米级。分析认为,由于RTX-PP解算成果是基于整个欧亚板块欧拉矢量求得[10],精度不高。如需获得CGCS2000坐标系下高精度成果,需进行相应的框架变换及历元变换,利用高精度速度场模型可获得厘米级解算精度[9]。
3 应用分析
现行的JTS131-2012《水运工程测量规范》主要包括控制测量、地形测量、水深测量、变形测量、施工测量,根据RTX技术性能测试结果,其应用分析如下:
(1)控制测量:目前RTX-PP后处理成果经过框架及历元变换后,其精度可达到厘米级,相较于传统控制测量,其优势包括不需要同步观测,单站采集静态数据进行单独处理即可。同时,在CGCS2000坐标系下,可减少对作为起算点的高级控制点的数量要求,采用1组平面、高程控制点作为校核点后便可快速开展测量作业。
(2)地形测量:可满足中、小比例尺地形图测量精度要求,传统RTK测量前需先布设控制网及架设基准站,采用RTX则不需要进行上述作业步骤,直接进行现场地形测量,且不受电台信号遮挡及传播距离限制,适用范围更广。
(3)水深测量:RTX定位精度为厘米级,现有RBN-DGPS定位精度为分米级,前者定位精度更高,因此采用RTX可提高水深测量定位精度,尤其是在多波束测量作业中。同时,RTX覆盖范围为全球,因此其作业范围更广,尤其是在深远海地区及海外欠发达地区,可用性及便捷性更大。
(4)变形测量:由于变形测量的测量精度需达到毫米至亚毫米级,因此RTX目前还不具备在变形测量领域全面推行条件,但RTX-PP后处理精度可达厘米级,可在变形测量特定作业环节中使用。
(5)施工测量:主要涉及施工定位及放样,目前在疏浚和航道整治施工放样及水工建筑施工放样领域定位普遍采用DGPS,由于RTX精度更高,故可满足此类领域定位精度要求。
4 结论
本文以Trimble RTX技术为例,分别从收敛时间、内符合精度、外符合精度及后处理精度对其进行性能测试及应用分析,主要结论如下:
(1)在已知控制点成果情况下,RTX可快速收敛至固定状态。在未知控制点成果情况下,RTX自动收敛时间约为30 min,与标定时间基本一致,且后续收敛时间逐步缩短。
(2)RTX内符合精度平面中误差优于2 cm,高程中误差优于4 cm;外符合精度各方向中误差优于6 cm,高程中误差约为10 cm,与标定精度基本一致。在成果精度及离散性方面,平面方向明显优于高程方向。
(3)在CGCS2000坐标系下,3次RTX-PP解算结果内符合性较好,平面较差优于3 cm;与BHCORS解算结果相比,平面及高程精度均为分米级。如要获得高精度的CGCS2000坐标,则需进行框架及历元变换,其精度可达毫米级,具体方法及参数可从ITRF官网获取。
(4)星站差分技术作为一种广域(全球)差分技术,在无基准站或CORS系统的区域,尤其是一带一路沿线发展中国家并未建立完善的陆基差分改正服务系统,其重要性及优势十分明显。RTX技术精度较高,可广泛应用于水运工程测量领域,提高测量精度及效率,节省工作时间及成本。
猜你喜欢
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
气象水文海洋仪器(2021年4期)2021-12-11
新世纪智能(数学备考)(2021年5期)2021-07-28
全球定位系统(2021年1期)2021-03-26
北京航空航天大学学报(2017年4期)2017-11-23
中成药(2017年6期)2017-06-13
中国工程咨询(2017年12期)2017-01-31
全球定位系统(2015年4期)2015-02-28
太空探索(2014年1期)2014-07-10