
火箭大偏航入轨双回路扰动观测补偿有限时间收敛滑模控制
2019-08-06 03:05吴燕生
宇航总体技术 2019年4期
吴燕生
(中国航天科技集团有限公司,北京100048)
0 引言
未来空间运输和空间应急救援等快速响应任务对火箭大偏航控制方法提出了特殊要求,以末级火箭异面机动变轨为例,相对于多次轨道面调整,一次性异面机动变轨极大地提高了时间效率,而大偏航角姿态控制对于实现一次性异面机动变轨至关重要。经典PID火箭姿态稳定控制方法具有在线计算量小、易于工程实现的优点,因此得到广泛应用。然而,考虑到大偏航角飞行条件下姿态角与角速度为非线性关系,以及存在质量、转动惯量、推力等参数不确定,经典控制方法往往难以保证良好的动态过程和稳态特性,基于标称状态特征点设计的控制参数在参数不确定情况下收敛特性难以证明。因此需要设计自适应、强抗扰的运载火箭姿态控制系统,以满足大偏航角飞行条件下姿态跟踪控制需求。
为解决对有外界扰动和不确定参数的运载火箭高精度姿态控制问题,钱默抒等[1]提出了一种基于双幂次滑模的变结构姿态控制算法,利用观测器实现对不可测弹道倾角的高精度估计和对包含参数不确定在内的复合扰动的高精度观测补偿。于亚男等[2]基于自抗扰理论和分数阶控制提出了一种运载火箭抗干扰分数阶控制器,通过设计扩张状态观测器对系统的内部和外部干扰进行估计,实现了高精度控制。王晔等[3]为抑制运载火箭自身结构参数变化和内外扰动对姿态控制精度和姿态稳定性的影响,设计了自抗扰控制器。通过跟踪微分器、扩张状态观测器以及姿态反馈控制器,获取了良好的动态性能、抗扰性和较强的鲁棒性。自适应滑模控制方法和鲁棒H∞控制方法也在文献[4-5]中分别被提出以增强火箭控制系统对参数不确定的适应性。朱海洋等[6]提出了一种基于径向基神经网络和低通滤波器的滑模控制方法,以解决液体运载火箭飞行过程中参数时变性和各种不确定性问题。陈书钊等[7]将状态预测神经网络控制应用于小型可回收火箭。潘豪等[8]为解决新型中型运载火箭飞经大风区的气动过载不稳定问题,采用主动减载控制设计,分析了基于扩张状态观测器的自适应减载控制方法。Li等[9]将小型固体测试火箭的不匹配干扰视为输入通道中的“总干扰”进行补偿建立EID系统,按照传统的频域方法,提出了一种基于H∞和等效输入扰动以增强系统抗干扰性的三轴姿态控制器。Bayat等[10]针对导弹的干扰不匹配、动力学未建模等问题,提出了一种固定时间自适应模型参考滑模控制方法,利用导弹状态方程和模型参考状态方程的跟踪误差,建立了滑模曲面,并将不匹配扰动和未建模的动力学问题作为状态方程的模型误差进行处理。
尽管文献[2-10]的研究成果能有效提高了控制系统对参数不确定的适应性,但是文献中考虑的姿态角环与角速度环均为线性关系;在大偏航角情况下,火箭的俯仰、偏航、滚转三通道姿态运动学方程存在耦合,即三通道姿态角和角速度间不再是简单的线性关系,姿态环的非线性项为姿态控制系统引入了非匹配扰动项,上述控制方法在设计过程中均没有考虑非线性关系下的非匹配扰动项影响,因此难以保证大偏航飞行过程中的姿态控制性能。
基于此,提出火箭大偏航入轨双回路扰动观测补偿有限时间收敛滑模控制,通过“双回路+虚拟控制量”方式将控制模型中非匹配扰动项转化为匹配扰动项,基于有限时间收敛扰动观测器实现对内外回路扰动的高精度观测补偿,并通过有限时间收敛滑模控制器实现控制误差的有限时间收敛。相较于经典PID控制,该方法具有强适应性和抗扰性,能够有效应对参数不确定下系统特性变化;相较于现有的运载火箭自适应控制方法,该方法能够有效解决大偏航角条件下三通道的姿态运动耦合带来的非线性模型特性,保证了大偏航角条件下三通道姿态角指令高品质跟踪。
本文第一节对大气层外火箭姿态运动学和动力学进行建模,并推导面向控制的姿态模型,为后续控制系统构建奠定基础;第二节给出双回路扰动观测补偿有限时间收敛滑模控制系统框架,并引入有限时间收敛扰动观测器和有限时间收敛滑模控制器,基于Lyapunov第二法对闭环控制系统有限时间收敛特性进行证明;第三节对比经典PID控制和双回路扰动观测补偿有限时间收敛滑模控制方法,充分验证双回路控制方法的抗扰性、高精度和良好的动态性能。
1 火箭大偏航入轨控制模型构建
1.1 姿态运动学和动力学建模
考虑火箭具有“十”字型布局的四台单摆发动机,发动机的安装示意图如图1所示。

图1 四台单摆发动机安装示意图Fig.1 Schematic diagram of four single-track engines
图1中,箭头方向为各发动机摆动的正方向,且4台发动机理论推力大小相同,设定为P。三通道发动机控制力矩表达式为

其中,r c为发动机安装半径,x R为推力作用点距箭体理论尖点的距离,x g为火箭质心距箭体理论尖点的距离。δγ、δψ和δφ分别表示滚转、偏航和俯仰三通道发动机等效摆角。等效摆角和各台发动机实际物理摆角关系为

考虑运载火箭体轴均为惯性主轴,则火箭入轨段姿态运动学和动力学微分方程表述为
其中,ωX1、ωY1、ωZ1分别表示滚转角速度、偏航角速度和俯仰角速度,φ、ψ、γ分别表示俯仰角、偏航角和滚转角,J xx、J yy、J zz分别表示三体轴转动惯量,J R表示发动机摆动惯量,m R表示发动机摆动质量,l R表示发动机质心到摆轴的距离,表示火箭纵向视加速度,M D X1、M DY1、M DZ1分别表示由于结构干扰引起的干扰力矩,分别表示发动机三通道等效摆角摆动加速度。
1.2 面向控制的姿态模型构建
建立面向控制的三通道姿态模型如下

其中,状态量x1和x2分别为

控制矩阵B为

系统扰动项f1(x1,x2)和f2(x1,x2)为

由式(9)可见,当火箭以大偏航角姿态飞行时,火箭三通道姿态运动学均存在耦合,即此时姿态环和姿态角速度环不再是简单的线性积分关系。
由此可见,由于扰动项f1(x1,x2)和f2(x1,x2)同时存在,因此实际模型中,同时存在有匹配扰动项f2(x1,x2)和非匹配扰动项f1(x1,x2),需展开控制系统设计,以实现在匹配/非匹配扰动共同存在下姿态指令高精度快速跟踪。
2 双回路扰动观测补偿有限时间收敛滑模控制
2.1 数学准备
定义1(有限时间稳定性)针对系统=f(x),x∈R n,原点是有限时间稳定,如果原点附近存在一个非空邻域{0}∈D⊆R n,则:(i)系统在原点及其邻域D/{0}是李雅普诺夫(Lyapunov)状态下稳定的;(ii)存在一个沉淀时间函数T:D/{0}→R+使系统有唯一解W x0(t),在t∈[t(0),T(x0)]和x0=x(t0)∈D/{0}条件下满足
引理1假设V(x):R n→R是一个连续的正定函数,在原点开邻域D⊆R n内满足如下微分不等式

其中,μ是正系数,η是正奇数且满足0<η<1。则函数V满足如下不等式

2.2 控制系统构建
为实现对中匹配/非匹配扰动项的高精度观测补偿,考虑采用双回路形式,结构框图如图2所示。

图2 火箭大偏航入轨双回路扰动观测补偿有限时间收敛滑模控制结构框图Fig.2 Structure of observer-based finite-time convergence sliding mode control system for rocket orbital insertion with large yaw
如图2所示,大偏航飞行条件下运载火箭姿态控制系统分解为姿态角指令跟踪环和角速度控制环。姿态角指令跟踪环输出角速度指令作为虚拟控制量传递给角速度控制环,角速度控制环跟踪传递来的虚拟控制量,通过双回路指令跟踪控制,实现角度指令的快速精确响应。
需要指出的是,由于引入了虚拟控制量,因此此时姿态环的控制量为ωc,即角速度指令,则扰动项f1(x1,x2)已由非匹配扰动项变为匹配扰动项,可通过扰动观测器进行精确观测补偿。
考虑外部姿态角指令为X c

则姿态环角度指令跟踪误差方程为

其中,为姿态角指令变化率,为实际姿态角变化速率
将x2描述为X2c,则

同样,角速度环跟踪误差方程为

其中,角速度指令变化率为

实际角速率微分为2

微分器1用于输出,微分器2用于输出;扰动观测器1用于补偿1(x1,x2),扰动观测器2用于观测补偿2(x1,x2)项。
滑模控制器1、2的设计目的则是实现如下系统的稳定控制

其中,、分别表示扰动观测器1、2观测收敛动态过程中的观测误差,且满足
需要指出的是,、范数存在上确界是合理的,因为火箭在大偏航入轨过程中无大气,且观测器收敛存在动态过程,因此观测器的观测值和实际值均不会产生突变,则观测误差的导数项范数存在上确界。
下面分别给出系统各组成部分——微分器、扰动观测器及滑模控制器的设计形式。
2.2.1 有限时间收敛微分器/扰动观测器
引入定理1如下所示。
定理1[11]考虑存在系统

分别设计观测器1、2
其中,sgn(·)表示符号函数,k1、k2、β1、β2、ε1和ε2为正系数,p0、q0、p1、q1为正奇数且

则可利用Z1实现对的有限时间收敛观测,利用Z3实现对的有限时间收敛观测。
证明:构造双李雅普诺夫函数为

则求导得到


根据引理1可知,观测器1、2均能实现有限时间收敛。
引用定理1,则微分器1、2形式分别为

其中,z0∈R3、z2∈R3分别用于观测e1、e2;k1、k2、β1、β2、ε1和ε2均为对角阵形式的参数设计矩阵,sgn_f(s1)为

其中,s11、s12和s13为s1的分量,sgn_f(s2)的形式与之相同。
微分器1、2收敛时间为

综上可知,扰动观测器1、2形式可表达为

则扰动观测器输出的补偿控制项分别为

2.2.2 有限收敛滑模控制器
设计双回路非奇异终端快速滑模面为[12]

其中,κ1>0,κ2>0,p5>q5,p6>q6且均为正奇 数,σ1=(σ11σ12σ13)T,σ2=(σ21σ22σ23)T。
根据文献[12]进行推导,可给出定理2如下。
定理2针对系统,若

其中


存在

在式(37)、式(38)作用下,式(21)能够在有限时间内收敛至滑模面式(36),且收敛时间满足

证明:由式(36)可得

将式(21)代入式(43)可得

给出如下假设:、满足

其中

需要说明的是,由于、范数存在上确界,因此必然存在对角阵ρ1、ρ2,使得式(46)、式(47)成立。
由文献[12]可知,当v1、v2符合式(39)、式(40)时,系统在有限时间内收敛至滑模面上,且收敛时间为式(42)。
现有文献中对快速终端滑模面上滑动模态的收敛性证明较多,因此在本文中不作展开,具体过程可参考文献[12]。
3 仿真验证
3.1 仿真参数设置
仿真中采用的运载火箭总体参数如表1所示。

表1 仿真参数Tab.1 Simulation parameters
仿真中双回路扰动观测滑模控制参数为
为充分验证双回路扰动观测补偿滑模控制的优良性能,引入经典PID控制方法进行对比。三通道PID控制参数均设计为

3.2 仿真结果及分析
俯仰、偏航、滚转通道初始姿态角如式(53)所示

设定俯仰、偏航通道存在10°阶跃响应指令,且滚转通道需要恢复至0°,则三通道响应曲线如图3~图5所示。
由三通道姿态角响应随时间变化曲线可知,PID方法作用下三通道上升时间均超过3s,而双回路滑模方法作用下俯仰角/偏航角/滚转角上升时间小于2s;同时,双回路滑模方法控制下三通道姿态角稳态误差小于0.1°,显著小于PID方法作用下的稳态误差,显示出双回路滑模控制方法的响应快速性和高稳态精度。

图3 时间-滚转角变化曲线Fig.3 Time history of roll angle
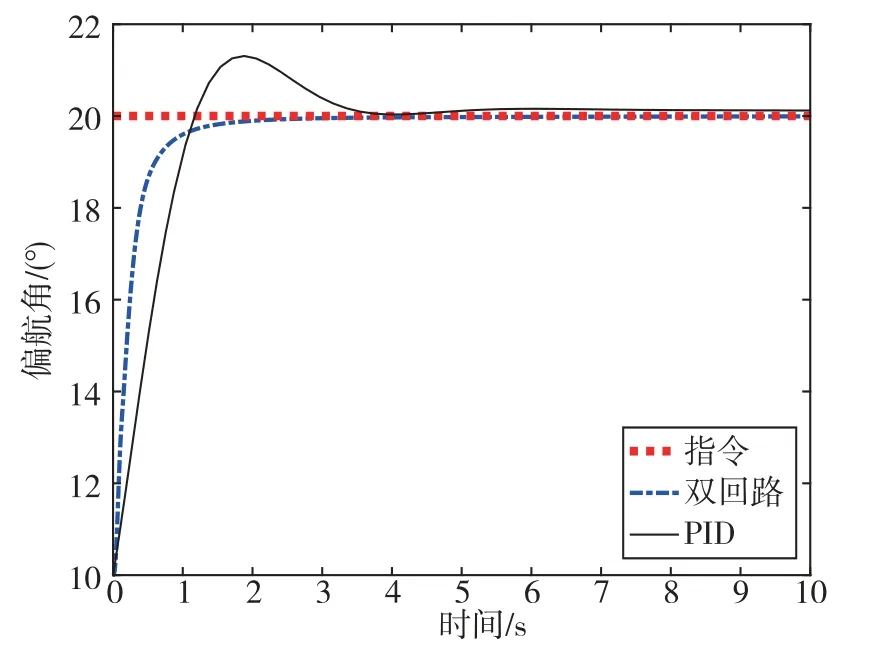
图4 时间-偏航角变化曲线Fig.4 Time history of yaw angle

图5 时间-俯仰角变化曲线Fig.5 Time history of pitch angle
为验证双回路滑模控制系统强抗不确定性和扰动性,考虑引入由结构偏差引起的扰动项为


参数不确定设定为:推力偏差+2%,J yy(J zz)偏差+20%,J xx偏差+20%,x R偏差-10%,x t偏差+10%。则仿真曲线如图6~图8所示。

图6 时间-滚转角变化曲线Fig.6 Time history of roll angle

图7 时间-偏航角变化曲线Fig.7 Time history of yaw angle
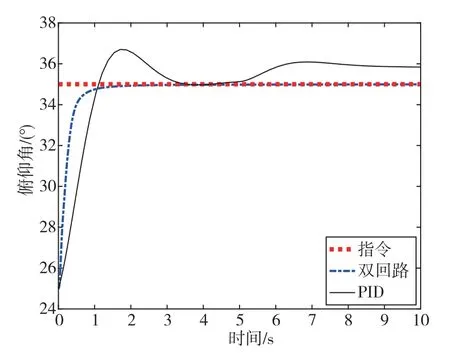
图8 时间-俯仰角变化曲线Fig.8 Time history of pitch angle
对比图6~图8可知,当第5s突然施加结构偏差引起大扰动时,PID作用下火箭姿态控制系统无法实现快速适应及偏差收敛,而双回路滑模控制作用下三通道姿态角响应曲线无明显变化,充分显示了双回路滑模控制方法的强抗扰性和抗参数不确定性。
4 结论
为解决大参数不确定和扰动下大偏航入轨火箭姿态控制问题,本文提出了一种双回路扰动观测补偿有限时间收敛滑模控制方法,通过“双回路+虚拟控制量+扰动观测器”方式有效观测并补偿了匹配/非匹配扰动项,基于有限时间收敛滑模观测器实现了误差的快速高精度收敛,结合“微分器+扰动观测器+滑模观测器”,实现了在大参数不确定和干扰条件下火箭姿态指令的有限时间快速高精度跟踪。仿真结果表明,双回路滑模控制方法具备有良好的动态过程和高稳态精度,对参数不确定和外部干扰具有强适应性。
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
西安交通大学学报(2022年7期)2022-07-19
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
计算机仿真(2021年3期)2021-11-17
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
水下无人系统学报(2021年1期)2021-03-10
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
