
基于改进粒子滤波跟踪算法的运动视频跟踪
2019-08-12 06:15张忠子
现代电子技术 2019年15期
关键词:粒子滤波
张忠子

摘 要: 为了进一步提高目标跟踪的准确率,提出一种基于改进粒子滤波的运动视频跟踪算法。首先,通过高斯混合模型实现动态背景建模,从而降低噪声和局部动态背景的干扰;然后,在RGB颜色直方图分离的基础上,结合粒子滤波和迭代递归实现目标运动检测,提高了前景检测的准确性。仿真试验结果显示,相比典型粒子滤波算法、遗传粒子滤波和DCEM,改进粒子滤波跟踪算法得到的前景目标的轮廓更好,因此运动目标检测精确度更高且处理时间更短。
关键词: 运动目标检测; 高斯混合模型; 背景建模; 粒子滤波; RGB颜色直方图; 迭代递归
中图分类号: TN911.73?34; TP391 文献标识码: A 文章编号: 1004?373X(2019)15?0059?04
Motion video tracking based on improved particle filter tracking algorithm
ZHANG Zhongzi
(Northeastern University at Qinhuangdao, Qinhuangdao 066004, China)
Abstract: In order to further improve the detection accurate rate of target tracking, a motion video tracking algorithm based on improved particle filtering is proposed. Dynamic background modeling is implemented by Gaussian mixture model to reduce noise and local dynamic background interference. And then, on the basis of separation of RGB color histograms, target motion detection is achieved in combination with particle filtering and iterative recursion to improve the accuracy of foreground detection. The simulation results show that the improved particle filter tracking algorithm can obtain a better outline of a foreground target, so its moving target detection accuracy is higher and its processing time is shorter in comparison with the typical particle filter algorithm, genetic particle filter and DCEM.
Keywords:moving target detection; Gaussian mixture model; background modeling; particle filtering; RGB color histogram; iterative recursion
0 引 言
隨着高质量摄像头成本的不断降低,以及网络带宽和数据存储能力的大幅提升,多媒体视频文件的数量急剧增加,伴随而来的各种场景应用产业也蓬勃发展,例如,比赛运动视频分析和处理、安防监控视频的智能识别、海量视频搜索等[1?3]。这些应用场景都需要准确的运动视频跟踪处理,特别是快速和准确的运动目标检测一直是视频处理研究的重点研究方向[4]。
在对视频或图像序列进行分析时,运动目标检测的主要任务是:判断视频图像序列中每一帧有无对应的前景目标;能否将对应的前景目标的特征提取出来,并将前景目标显示出来。目前,比较流行的运动目标检测方法有两类[4]:帧间差分法、背景相减法。其中,帧间差分法的算法复杂度低,实时性好,但是当背景与检测物体的纹理或者颜色分布较为平均的条件下,检测性能较差。背景减除法能够获得较完整的目标图像,适用于可靠的安防视频监控任务,但是实时性较差,处理速度慢。基于粒子滤波器原理,文献[5]提出一种基于改进粒子滤波的多目标检测与跟踪方法,采用动态高斯模型对视频序列中的运动目标进行检测,并结合加权粒子滤波算法实现兴趣目标识别。文献[6]提出适用于复杂环境中微弱扩展目标检测前跟踪的粒子滤波算法,通过Weibull杂波模型对粒子滤波算法进行改进,有效抑制了强噪声的干扰。高斯混合模型在抑制局部遮挡、光照等因素的影响时具有一定的优势,且RGB颜色直方图可在一定程度上避免产生色彩偏移和伪影[7?8]。因此,本文提出将高斯混合模型和RGB颜色直方图递归滤波引入到粒子滤波算法进行改进。公共监控数据库上的仿真试验结果验证了提出改进算法的有效性和先进性。
1 粒子滤波器介绍
定义粒子滤波器的状态向量[s]为[9?10]:
2 改进的粒子滤波跟踪算法
2.1 基于高斯混合模型的动态背景建模
只有检测到了前景目标才能对其进行跟踪与后续的相关分析处理,因此目标检测是目标跟踪处理的基础。局部遮挡、光照等因素都会影响目标检测的精度。本文采用高斯混合模型[11]对跟踪视频序列的输入帧进行背景处理,得到一个运动目标的动态背景模型。高斯混合模型的定义公式如下:
2.2 采用RGB颜色直方图的迭代递归粒子滤波
在上述动态背景建模检测到运动目标后,利用改进粒子滤波算法对运动目标进行预测跟踪。本文采用RGB颜色直方图来尽量避免产生色彩偏移和伪影,即按照三个颜色通道的最大值来估算。针对每个像素的亮度值,其亮度图像[L]通过以下公式估算[13]:
3 实验与比较
为了验证提出改进粒子滤波跟踪算法的有效性和先进性,分别采用视频跟踪最常用的CAVIAR和OTB2015两个公共视频测试数据集[15]对典型粒子滤波(Typical Particle Filter Algorithm,TPFS)[5?6]、遗传粒子滤波(Genetic Particle Filter,GPFS)[9]、离散连续能量最小化(Discrete?Continuous Energy Minimization,DCEM)[10]和本文算法进行比较。实验环境参数:Intel 2.4 GHz、8 GB内存,Windows 7操作系统,编程语言为Matlab,软件版本号為R2012a。
3.1 目标检测和跟踪结果
以CAVIAR图像序列数据集中的One person walking为例,为了对提出算法的目标检测和跟踪进行主观评估,序列图像大小为384[×]288。One person walking视频序列的跟踪结果如图1所示,分别为第15秒、第1分20秒、第2分35秒和第3分40秒的帧截图。可以看出,在不存在遮挡的条件下,提出算法的检测与跟踪效果良好,能够满足人体跟踪要求。
图1 CAVIAR室内监控数据库跟踪结果
3.2 性能评估
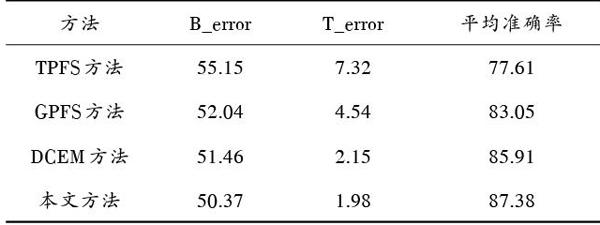
在遮挡情况时,为了客观评价4种算法对运动目标检测和跟踪的性能,采用背景误检率(Background Detection error,B_error)、目标误检率(Target Detection error,T_error)和平均准确率作为客观评价的指标[16]来评估该算法的性能。其中,B_error和T_error的计算方式如下:
式中:[B]表示ground truth图中背景的像素总数目;[F]表示ground truth图中前景区域的像素总数目;BN表示背景区域被错误地检测为运动目标;FN表示目标区域被错误地检测为背景。
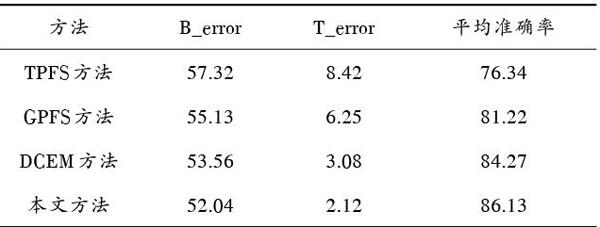
表1和表2分别为遮挡情况时,4种算法在CAVIAR和OTB2015数据库上的检测与跟踪比较结果。其中,本文算法的B_error和T_error更低,平均准确率最高,这是因为本文算法充分利用了高斯混合模型在抑制局部遮挡、光照等因素方面的优势,从而提高了遮挡情况时的检测效果。
表1 CAVIAR数据库中4种算法的检测与跟踪
表2 OTB2015数据库中4种算法的检测与跟踪比较结果(遮挡情况时)
3.3 运行时间分析
4种算法在CAVIAR和OTB2015监控视频数据库上的运行时间对比结果如表3所示。
表3 4种算法平均运行时间比较
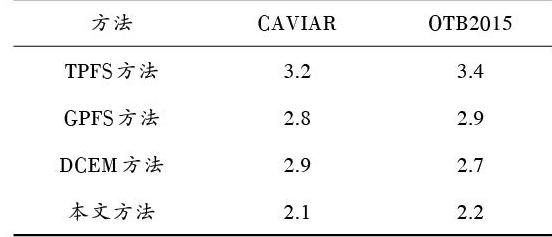
由表3可以看出,相比于其他3种算法,本文算法的运行时间最短,验证了其高效性,这是因为采用递归滤波方法有效降低了粒子滤波的计算复杂度。
4 结 论
本文提出一种基于改进粒子滤波的运动视频跟踪算法。将高斯混合模型和RGB颜色直方图递归滤波引入到粒子滤波算法中,高斯混合模型在抑制局部遮挡、光照等因素的影响时具有一定的优势,并在一定程度上避免产生色彩偏移和伪影。根据公共视频测试数据集上的测试结果得出如下结论:
1)高斯混合模型的运用有效提高了遮挡情况时的前景目标检测效果;
2)迭代递归滤波估计有效降低了粒子滤波的计算复杂度,可以有效应用于实时图像跟踪场景。
参考文献
[1] HONG W, KENNEDY A, BURGOS?ARTIZZU X P, et al. Automated measurement of mouse social behaviors using depth sensing, video tracking, and machine learning [J]. Proceedings of the National Academy of Sciences of the United States of America, 2015, 112(38): 5351?60.
[2] ZHOU Xiaolong, YU Hui, LIU Honghai, et al. Tracking multiple video targets with an improved GM?PHD tracker [J]. Sensors, 2015, 15(12): 30240?30260.
[3] TOMASI M, PUNDLIK S, LUO G. FPGA–DSP co?processing for feature tracking in smart video sensors [J]. Journal of real?time image processing, 2016, 11(4): 751?767.
[4] SANMIGUEL J C, CALVO A. Covariance?based online validation of video tracking [J]. Electronics letters, 2015, 51(3): 226?228.
[5] 周明,涂宏斌.一种基于改进粒子滤波的多目标检测与跟踪方法[J].华东交通大学学报,2016,33(2):121?126.
ZHOU Ming, TU Hongbin. A multi?objective detection and tracking method based on improved particle filter [J]. Journal of East China Jiaotong University, 2016, 33(2): 121?126.
[6] 吴孙勇,薛秋条,朱圣棋,等.杂波环境下基于粒子滤波的微弱扩展目标检测前跟踪算法[J].雷达学报,2017,6(3):252?258.
WU Sunyong, XUE Qiutiao, ZHU Shengqi, et al. Tracking algorithm for weak extended target detection based on particle filter in clutter environment [J]. Journal of radars, 2017, 6(3): 252?258.
[7] INOUE K, HARA K, URAHAMA K. RGB color cube?based histogram specification for hue?preserving color image enhancement [J]. Journal of imaging, 2017, 3(3): 24?37.
[8] SOLEIMANIZADEH S, MOHAMAD D, SABA T, et al. Recognition of partially occluded objects based on the three different color spaces (RGB, YCbCr, HSV) [J]. 3D Research, 2015, 6(3): 1?10.
[9] ZHANG M, JIA H T, SHEN Z, et al. Improved resampling procedure based on genetic algorithm in particle filter [J]. Journal of University of Electronic Science & Technology of China, 2015, 44(3): 344?349.
[10] MILAN A, SCHINDLER K, ROTH S. Multi?target tracking by discrete?continuous energy minimization [J]. IEEE transactions on pattern analysis & machine intelligence, 2016, 38(10): 2054?2068.
[11] 蔡念,陈世文,郭文婷,等.融合高斯混合模型和小波变换的运动目标检测[J].中国图象图形学报,2018,16(9):1716?1721.
CAI Nian, CHEN Shiwen, GUO Wenting, et al. Moving target detection based on Gaussian mixture model and wavelet transform [J]. Journal of image and graphics, 2018, 16(9): 1716?1721.
[12] 李玉,徐艳,赵雪梅,等.利用高斯混合模型的多光谱图像模糊聚类分割[J].光学精密工程,2017,25(2):509?518.
LI Yu, XU Yan, ZHAO Xuemei, et al. Multi?spectral image fuzzy clustering segmentation using Gaussian mixture model [J]. Editorial office of optics and precision, 2017, 25(2): 509?518.
[13] SUN H, ZHAO Z, QIN T, et al. Content?based image retrieval using color vector angle difference histogram [J]. Journal of the Chinese institute of engineers, 2017, 40(3): 246?256.
[14] WANG D Q. Brief paper: L least squares?based recursive and iterative estimation for output error moving average systems using data filtering [J]. Iet control theory & applications, 2011, 5(14): 1648?1657.
[15] LI D, WEN G, KUAI Y, et al. Learning padless correlation filters for boundary?effect free tracking [J]. IEEE sensors journal, 2018, 18(18): 7721?7729.
[16] CUI W, WANG Y, FAN Y, et al. Localized FCM clustering with spatial information for medical image segmentation and bias field estimation [J]. Journal of biomedical imaging, 2013(10): 13?19.
猜你喜欢
电脑知识与技术(2017年10期)2017-06-05
物联网技术(2017年5期)2017-06-03
中国新技术新产品(2017年10期)2017-05-10
计算机应用(2016年12期)2017-01-13
航空兵器(2016年5期)2016-12-10
电脑知识与技术(2016年1期)2016-03-22
科技与创新(2016年3期)2016-03-15
航空兵器(2014年4期)2015-01-15
计算技术与自动化(2014年3期)2014-10-28
