基于操纵稳定性的主动转向系统控制
2019-08-16 04:11赵婷闫海敬
科教导刊·电子版 2019年18期
关键词:汽车
赵婷 闫海敬

摘要:主动转向系统是现阶段动力系统中新提出的一种转向方案,这种转向方案的目的是为了保证系统工作的稳定性,保证车辆能够正常行驶,无论是电动轮汽车还是其他汽车,基于主动转向系统控制,能在不同路面上针对路面的附着系数建立,对汽车有无主动转向和主动转向干预情况等进行分析,调整车速以及不同方向盘转角的输入情况,实现行车的阶跃响应以及单移线仿真分析。现阶段,方针分析结果表明,但阶跃输入越大,汽车在不同路面附着系数和方向盘转角下的汽车低速转向横摆角和质心侧偏角更大,转向灵敏度显著提升,相对的,汽车在高速横摆角速度和质心侧偏角更小,转向更加安全,在汽车实际行驶转角中,主动转向控制系统越是稳定,则干预方向盘实际转角更加安全及稳定。
关键词 操纵稳定性 主动转向系统 汽车
0引言
基于操纵稳定性和车辆转向的要求,主动转向系统利用虚拟样机技术对主主动转向进行建模和仿真,基于不同的路面附着系数,建立主动转向系统的模型,从而考虑到底要不要进行主动转向干预,针对不同路面进行整车车速和不同方向盘转角之间的性能仿真分析,以此确定主动转向系统的设计和开发。本文从现有汽车的主动转向系统和操纵稳定性进行综合性分析,探讨如何在操纵稳定性的要求上开发主动转向系统控制,以保证主动转向系统的稳定运行。
1主动转向系统和操纵稳定性概述
1.1主动转向系统研究现状
现如今对主动转向系统的研究集中在转向原理以及控制策略中,从行车安全以及操纵便利性角度进行车辆行驶分析,通过对汽车制动转轮评估和分析主动转向系统的性能,从而对主动转向系统进行深入分析,积极采用现如今的虚拟仿真技术进行汽车行驶中的各种情况模拟,针对整车车速以及不同方向盘转角输入的性能仿真分析,利用各种VR技术相关软件进行深入试验模拟,通过软件进行虚拟试验,从而确定向不同路面附着系数下的主动转向以及主动转向干预操作,对不同车速情况下的电轮转向系统进行性能解析,确定应该实施主动转向控制策略,并建立起主动转向干预的模型,对不同车速以及方向盘转角下的汽车低速转向横摆角速度和质心偏侧角进行分析预测, 实现车辆缓转向的安全性,保证驾驶员能够基于路感干预汽车转向。
1.2主动转向系统概述
现如今的AFS系统充分考量了内外侧轮胎侧向力在转向时的不同饱和差异特性,在新的AFS系统下能显著减少内侧车轮转角以及外侧车辆转角增加,为外侧车轮提供转向所需的侧向力,以此实现更好地跟踪理想横摆角速度,保证车辆行驶转向的安全性和稳定性。且性的AIFS系统结构和实现原理更加合理和简化,比对传统主动转向系统,AIFS系统是由连接左右车轮的一套行星齿轮机构和车轮齿条机构以及转向盘机械连接装置组成,通过太阳轮轴和2个太阳轮的固定连接,可以将齿轮齿条相连的小齿轮与行星齿轮连接,并将转角电机作为电机驱动出轮的外齿圈,也就是将涡轮蜗杆机构旋转,从而实现车辆的减速增扭,若是电机运转高速,则可以在电机驱动齿轮产生的转角和转向盘之间的转角外齿圈叠加,通过左右齿条差速运动,保证左右轮的独立转向。所以新旧主动转向动力系统控制稳定性的对比有四大点不同,一是新AFS系统中有扭矩传感器,比对传统的主动转系统能够更加快速地测量驾驶员转向盘路局以及转向盘转角输入,二是比对前轴而言,汽车左右车轮能够在转向器思想前轮转向,左右车轮中有轮毂电机,通过电机能够汽车行驶提供驱动力和转向助力,从而有效优化电机的驱动性和安全性,三是与后轴对比,转角电机能利用傳动机构驱动实现转向器的后轮转角,达到主动转向功能的目的,四是汽车转向中电控ECU能按照实际路况和路面附着系数,反馈整车车速以及转向盘力矩以及质心侧偏角等信号,以此预测驾驶员的驾驶意图,通过不同的车辆虚拟模型建立确定理想的转向手力,并在经转向器传递下实现转向盘力矩等叠加,克服阻力矩后能实现助力转向,保证转角电机的后轴转向器能实时控制后轮获取转向所需的附加转角,从而实现主动转向功能和助力转向功能的融合,保证汽车行驶的稳定性。
1.3操纵稳定性概述
车辆操纵稳定性是从两个角度对车辆行驶进行评价,一是从稳定性角度,二是从操纵性角度,评价的内容是驾驶员行车中能在不过分紧张以及疲劳的状况下,汽车可以按照驾驶员的驾驶意图,进行转向系或者给定方向的行驶,保证汽车行驶中不受外界干扰,即使是在路不平、侧风以及货物等干预依旧能实现稳定行驶。操纵性的评价侧重于汽车的操作便利、顺从情况,车辆是否能按照驾驶员要求运行,稳定性则是车辆抵抗外界干预行车的状况。
2基于操纵稳定性的主动转向系统控制的设计与开发
因为汽车在曲线行驶或者是紧急转向的时候,由于离心力操作很容易导致汽车前后轮进进的附着极限先后顺序不同,汽车失去侧向稳定性会导致汽车出现不同的运动状态,汽车也会因此失去操纵稳定性出现侧滑、激转、甩尾等危险情况,眼中则是会导致后轴侧滑失去转向鞥里以及路径跟踪能力,从而导致汽车进会失去安全转向稳定性,为避免出现弯道事故保证汽车操纵稳定性,主动转向系统控制设计与开发,要从附加横摆角速度和不同路面附着系数,前后轮转向等入手,通过附加横摆角速度的控制策略改善汽车侧向稳定性。基于现如今相控技术的不断发展,主动转向技术对于汽车行驶控制而言,已经实现了汽车的主动转向,依据取向运动的轮胎和路面附着极限,依据汽车转向时的内外侧车轮不同的横摆角速度和侧向力进行综合性分析,从而提高汽车的稳定性,主动转向系统控制时要利用好线控技术从而提高汽车侧向稳定性,本文从2自由度汽车模型作为参考,在8自由度的控制策略中,直接利用主动转向技术改善汽车侧向稳定性,实现主动转向系统的建立,以下是主动转向系统控制的设计与开发的主要内容:
第一,先建立汽车动力学模型,从X、Y两方向的平动自由度对Z轴的横摆运动以及绕X轴的侧倾运动建立汽车动力学模型,以下是包含4个车轮的8自由度汽车动力学模型,
方程式中的M是整车装备质量,而Ms则是为簧载质量;Vx、Vy等则是车辆分别沿x轴和y轴的运动反向,则是侧倾角,Ff为滚动阻力, 为横摆角速度,Fxi 、Fyi为轮胎上的纵向力和横向力。
第二,控制策略的设计和实施,首先汽车控制方式是以主动转向技术改变车轮内外侧的侧向力大小,通过调节汽车车轮以及路面之间的切向例,在2自由度参考模型种确定驾驶员的意图,获取理论上的汽车行驶轨迹,利用参考模型附着极限对汽车车轮上侧向力利用系数对逻辑门限的控制策略使用进行判断,以此侧向力的利用系数为(i=1, 2, 3, 4) 。式中, F yi 为 2自由度参考模型中车轮上的实际侧向力;F yimax 为车轮上的极限侧向力; th 为车轮上的侧向力利用系数门限值。采用直接反馈的比例控制方式,在驾驶员的转角输入過程中,当检测到某车轮上的侧向力系数超过了设定的门限值,则利用主动转向装置产生一定的主动转角来保证汽车的侧向稳定性。主动转向角度与转向轮转角以及侧向力利用系数之间的关系有两个表达式式中, a 是主动转向控制转角输入;k a 为比例系数; w 为驾驶员转角输入 ,现阶段主动转向控制系统可以改变整个汽车的侧向受力,通过主动干预以及转向转轮角的变化,保证汽车能够按照驾驶员的意图行车,保证汽车前进轨迹符符合驾驶员意图。由于汽车行驶轨迹和汽车行驶速度密切相关,汽车行驶道控制方法进以及汽车行驶速度进行调整,包括汽车行驶姿态也要相应转变,所以在整个汽车主动转向控制策略中,需要对汽车整个动力学模型和路况进行分析,尤其是要模拟紧急情况,从关键情况对高速形式的紧急避让工况进行分析,从而保证侧向稳定性控制在车道保持控制之上,确保车辆操纵稳定性。
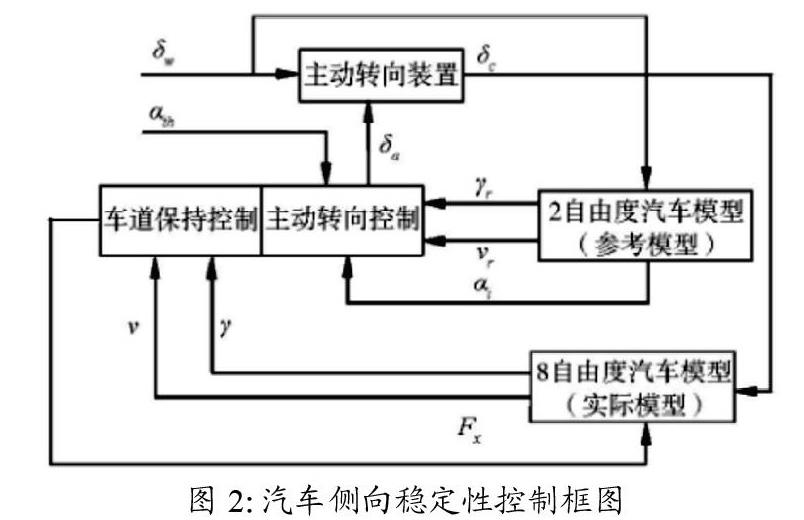
第三,控制框图,由于主动转向控制角度大小的确定主要依据和考虑汽车能够快速完成相应的避让动作的需要;另外则需要考虑汽车车道保持的能力 。大幅度的改变转向轮的转角汽车车道保持的控制很难完成。但汽车的制动力与汽车的附着极限相关联;另一方面,由于存在车轮上的载荷转移,因此不宜进行非常大的汽车主动转向角的控制。所以汽车侧向稳定性控制策略,基于主动转向技术之上,要从汽车侧向稳定性的好坏与汽车曲线行驶时的离心力大小有直接的关系入手,采用基于附着系数的逻辑门限控制方法,要是车轮上的侧向力利用系数超过门限值,便直接在转向轮上施加反向的转向轮转角来减少汽车的侧向力大小,以提高汽车侧向稳定性,实际控制框图如图2所示。
3结语
综上所述,基于操纵稳定性的主动转向系统控制能够便捷地运用到汽车动态性能的控制当中 ,并且提高汽车的主动安全性提供新的控制方式和方法。系统设计和应用中,要在提高汽车侧向稳定性的同时还必须考虑汽车的运行轨迹,利用相应的控制方式来满足驾驶员的真实意图,提高汽车的稳定性和操纵性。
参考文献
[1] 赵树恩,李玉玲,刘文文.融合主动转向功能的电动助力转向系统H_∞控制[J].机械科学与技术,2014,33(08):1233-1237.
[2] 宋宇,陈无畏,陈黎卿.车辆稳定性系统与四轮转向系统集成控制研究[J].中国机械工程,2014,25(20):2788-2794.
[3] 郭保军,董小瑞,王艳华.基于LMI的H_∞控制在四轮主动转向系统中的应用[J].制造业自动化,2015,37(01):4-6.
[4] 杨舒涵,王春燕,赵万忠.主动前轮转向车辆操纵稳定性的仿真分析[J].重庆理工大学学报(自然科学),2015,29(01):16-22+26.
猜你喜欢
小学生优秀作文(低年级)(2020年4期)2020-07-24
汽车与安全(2019年9期)2019-11-22
汽车与安全(2019年8期)2019-09-26
汽车与安全(2019年5期)2019-07-30
汽车观察(2019年2期)2019-03-15
汽车与新动力(2018年2期)2018-05-09
作文大王·低年级(2016年4期)2016-04-18
学苑创造·A版(2009年6期)2009-12-07